TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025119490
公報種別
公開特許公報(A)
公開日
2025-08-14
出願番号
2024014398
出願日
2024-02-01
発明の名称
人肌又は模擬肌の触感に関する評価方法
出願人
花王株式会社
代理人
個人
主分類
G01N
19/00 20060101AFI20250806BHJP(測定;試験)
要約
【課題】接触子を用いた人肌又は模擬肌の触感に関連する評価の精度を向上させ得る技術を提供する。
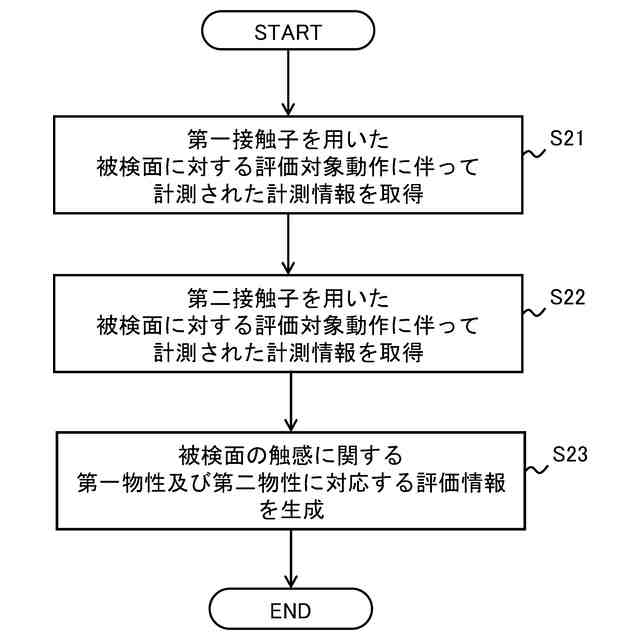
【解決手段】評価方法は、人肌又は模擬肌の被検面に接触子を接触させて評価対象動作を行うことに伴いセンサで検出される情報に基づいて、人肌又は模擬肌の触感に関連する評価を行う方法であって、複数の物性の中の一以上の物性が相互に異なる第一接触子及び第二接触子を用いた被検面に対する評価対象動作に伴って計測された接触子ごとの計測情報を取得する工程と、取得された接触子ごとの計測情報に基づいて、被検面の触感に関する第一物性及び第二物性に対応する評価情報を生成する工程とを含み、第一接触子においては、第一物性に対する感度が第二物性に対する感度よりも高く、第二接触子においては、第一物性に対する感度が第二物性に対する感度よりも低い。
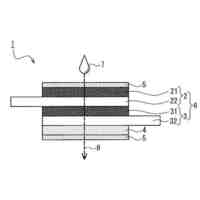
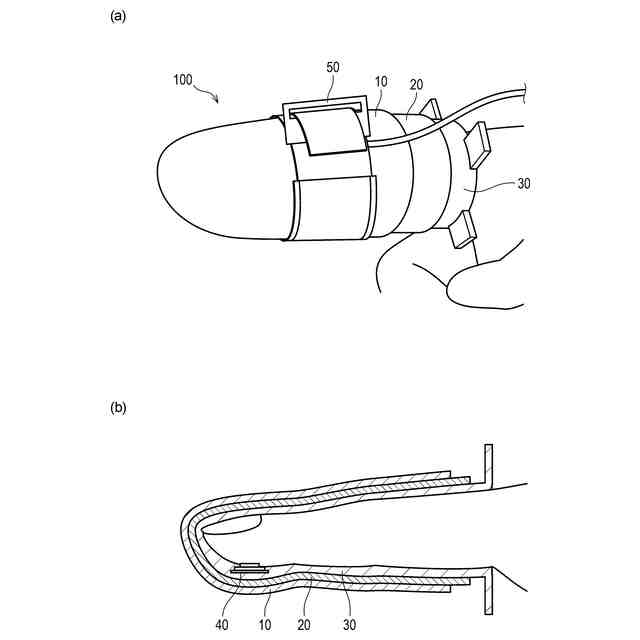
【選択図】図2
特許請求の範囲
【請求項1】
人肌又は人肌を模した模擬肌の被検面に人の手指の可撓性を模した接触子を接触させて評価対象動作を行うことに伴いセンサで検出される情報に基づいて、人肌又は模擬肌の触感に関連する評価を行う方法であって、
触感に違いを生じさせ得る複数の物性の中の一以上の物性が相互に異なる第一接触子及び第二接触子を用いた前記被検面に対する前記評価対象動作に伴って計測された接触子ごとの計測情報を取得する取得工程と、
前記取得された接触子ごとの計測情報に基づいて、前記被検面の触感に関する第一物性及び該第一物性とは異なる第二物性に対応する評価情報を生成する生成工程と、
を含み、
前記第一接触子においては、前記第一物性に対する感度が前記第二物性に対する感度よりも高く、
前記第二接触子においては、前記第一物性に対する感度が前記第二物性に対する感度よりも低い、
評価方法。
続きを表示(約 1,500 文字)
【請求項2】
前記取得工程では、一人以上の人肌の被検面若しくは一以上の模擬肌の被検面の一方又は両方を含む複数の被検面の各々に関する接触子ごとの計測情報が取得され、
前記生成工程では、前記取得された接触子ごとの計測情報が被検面間でそれぞれ比較可能となるような前記評価情報が生成される、
請求項1に記載の評価方法。
【請求項3】
前記取得工程では、一人以上の人肌の被検面若しくは一以上の模擬肌の被検面の一方又は両方を含む複数の被検面の各々に関する接触子ごとの計測情報が取得され、
前記生成工程では、前記第一接触子を用いて得られた各被検面の計測情報の差及び前記第二接触子を用いて得られた各被検面の計測情報の差に少なくとも基づく前記評価情報が生成される、
請求項1に記載の評価方法。
【請求項4】
前記センサは、摩擦若しくは振動の一方又は両方を検知可能であり、
前記取得工程では、前記第一接触子、前記第二接触子、又は前記第一接触子及び前記第二接触子とは一以上の物性が異なる第三接触子を用いた前記被検面に対する摺動によって摩擦情報若しくは振動情報の一方又は両方が計測情報として取得され、
前記生成工程では、前記取得された計測情報に基づいて、前記被検面の表面形状に関する評価情報を更に生成する、
請求項1から3のいずれか一項に記載の評価方法。
【請求項5】
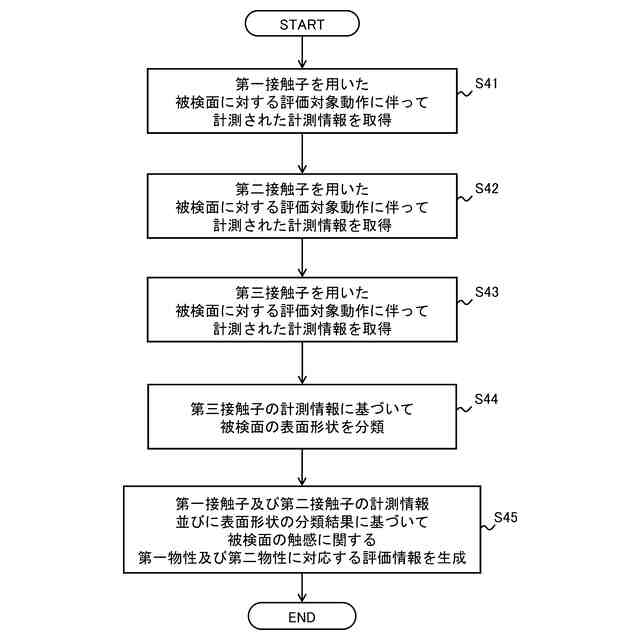
前記第一接触子、前記第二接触子、又は前記第一接触子及び前記第二接触子とは一以上の物性が異なる第三接触子を用いた前記被検面に対する前記評価対象動作に伴って取得された計測情報を少なくとも用いて、前記被検面の表面形状を分類する工程、
を更に含み、
前記生成工程では、前記表面形状の分類結果及び前記取得された接触子ごとの計測情報に基づいて、前記被検面の触感に関する前記第一物性及び前記第二物性に対応する前記評価情報を生成する、
請求項1から3のいずれか一項に記載の評価方法。
【請求項6】
請求項1から3のいずれか一項に記載の評価方法で用いられる前記第一接触子及び前記第二接触子の接触子セットの製造方法であって、
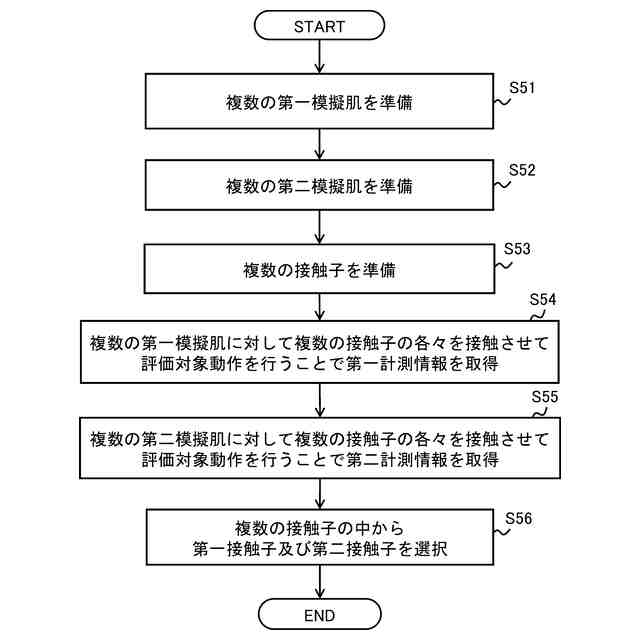
前記第二物性が共通し前記第一物性が各々異なる複数の第一模擬肌を準備する工程と、
前記第一物性が共通し前記第二物性が各々異なる複数の第二模擬肌を準備する工程と、
前記触感に違いを生じ得る複数の物性の中の一以上の物性がそれぞれ異なる複数の接触子を準備する工程と、
前記複数の第一模擬肌に対して前記複数の接触子の各々を接触させて前記評価対象動作を行うことに伴って第一模擬肌ごとかつ接触子ごとに第一計測情報を取得する工程と、
前記複数の第二模擬肌に対して前記複数の接触子の各々を接触させて前記評価対象動作を行うことに伴って第二模擬肌ごとかつ接触子ごとに第二計測情報を取得する工程と、
前記第一計測情報の第一模擬肌ごとの差異及び前記第二計測情報の第二模擬肌ごとの差異に基づいて、前記複数の接触子の中から前記第一接触子及び前記第二接触子を選択する工程と、
を含む接触子セットの製造方法。
【請求項7】
前記接触子及び前記センサを備え、
請求項1から3のいずれか一項に記載の評価方法を実行可能な評価システム。
【請求項8】
前記接触子及び前記センサを備え、
請求項5に記載の評価方法を実行可能な評価システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、人肌又は模擬肌の触感に関連する評価を行う技術に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
下記特許文献1には、人肌又は人肌を模して作成された面である対象面に対して接触子を接触させて摺動させることに伴い振動センサで検出される振動情報に基づいてその対象面の状態を評価する人肌又は化粧料の評価方法が開示されている。
下記特許文献2には、人の手指の可撓性を摸した可撓性を有する接触子と、その接触子の外側表面であって被検体に接触させる接触面と、その接触子の内側に設けられ当該接触面を介して被検体から受ける力を計測する力センサとを備える肌又は剤の評価装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-095263号公報
特開2022-161710号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
人の手指や手のひら等による触感の官能評価では、評価者の感覚に大きく依存するため、客観的な定量評価を行うことが困難であるのに対して、上述の評価方法及び評価装置によれば、人の手指の可撓性を摸した接触子を用いることで、被検面の触感に関連する評価を簡便かつ高感度に行うことができる。
【0005】
本発明者らは、上述の評価手法と同様に接触子を利用して被検面の触感や触感に違いを生じさせ得る被検面の物性の特徴を検出するのに、接触子の物性が大きく影響することを見出し、更に、当該特徴を検出し易い接触子の物性等の特定に成功した。
本発明は、このような新たな知見に基づいて、接触子を用いた人肌又は模擬肌の触感に関連する評価の精度を向上させ得る技術を提供する。
【課題を解決するための手段】
【0006】
本発明によれば、人肌又は人肌を模した模擬肌の被検面に人の手指の可撓性を模した接触子を接触させて評価対象動作を行うことに伴いセンサで検出される情報に基づいて、人肌又は模擬肌の触感に関連する評価を行う方法であって、触感に違いを生じさせ得る複数の物性の中の一以上の物性が相互に異なる第一接触子及び第二接触子を用いた前記被検面に対する前記評価対象動作に伴って計測された接触子ごとの計測情報を取得する取得工程と、前記取得された接触子ごとの計測情報に基づいて、前記被検面の触感に関する第一物性及び該第一物性とは異なる第二物性に対応する評価情報を生成する生成工程と、を含み、前記第一接触子においては、前記第一物性に対する感度が前記第二物性に対する感度よりも高く、前記第二接触子においては、前記第一物性に対する感度が前記第二物性に対する感度よりも低い評価方法が提供される。
【0007】
また、本発明によれば、前記接触子及び前記センサを備え、上述の評価方法を実行可能な評価システムが提供される。
また、本発明によれば、上述の評価方法をコンピュータに実行させ得るプログラム或いはこのようなプログラムを記憶したコンピュータが読み取り可能な記憶媒体が提供される。
【発明の効果】
【0008】
上記態様によれば、接触子を用いた人肌又は模擬肌の触感に関連する評価の精度を向上させ得る技術を提供することができる。
【図面の簡単な説明】
【0009】
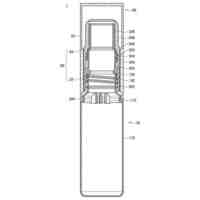
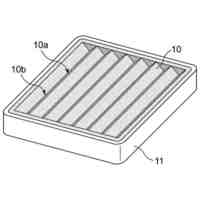
本実施形態に係る評価方法で利用される接触子及びセンサの例を示す図である。
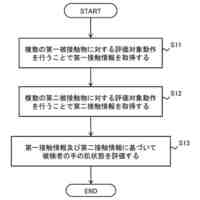
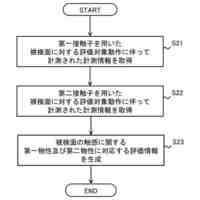
第一実施形態に係る評価方法(第一評価方法)を示すフローチャートである。
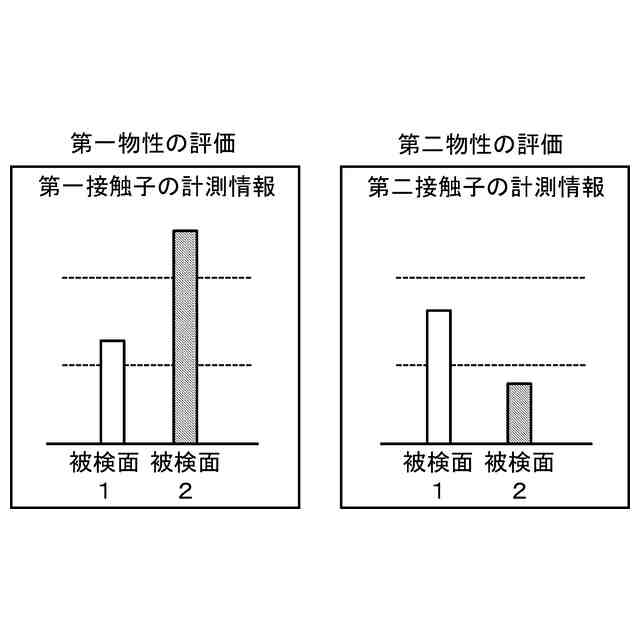
被検面間で比較可能な評価情報の例を示す図である。
第二実施形態に係る評価方法(第二評価方法)を示すフローチャートである。
第一接触子及び第二接触子の接触子セットの製造方法(本製造方法)を示すフローチャートである。
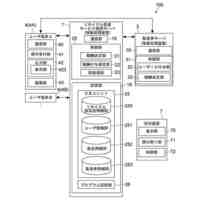
本実施形態における評価システムのハードウェア構成例を概念的に示す図である。
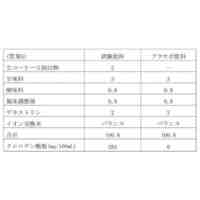
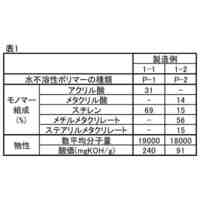
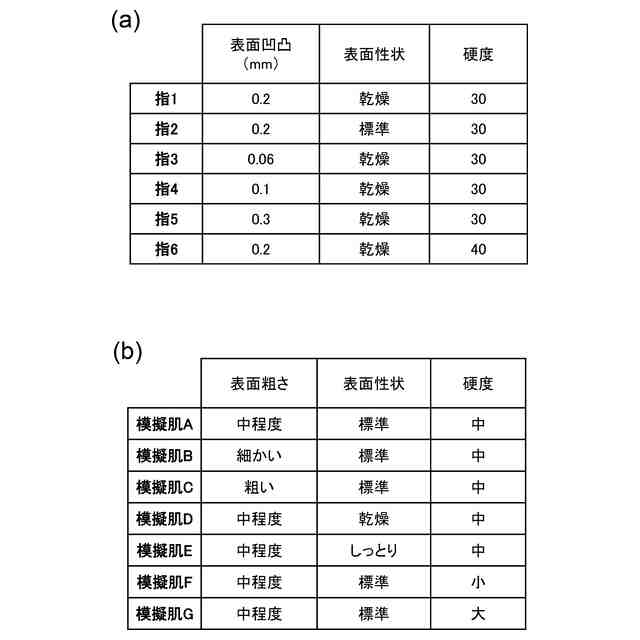
図7(a)は本検証で用いられた6つの接触子の特性を示す表であり、図7(b)は本検証で用いられた7つの模擬肌の特性を示す表である。
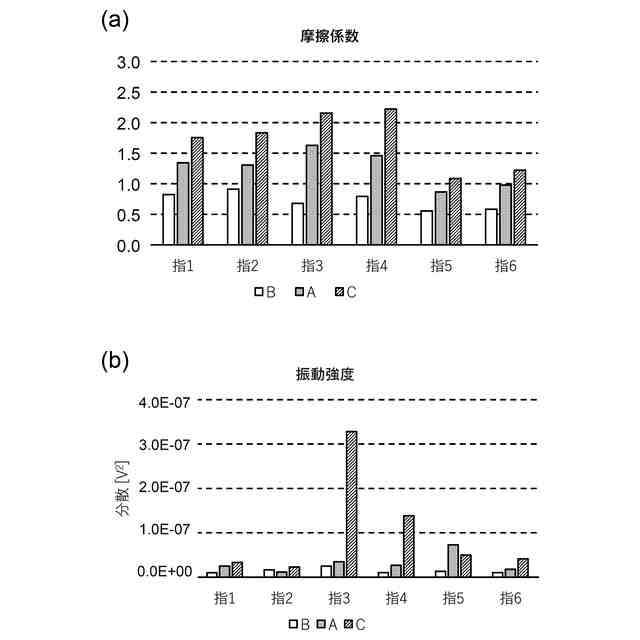
図8(a)は、6つの接触子(指1から6)の各々について模擬肌A、B及びCの摩擦係数を並べたグラフであり、図8(b)は、6つの接触子(指1から6)の各々について模擬肌A、B及びCの振動強度を並べたグラフである。
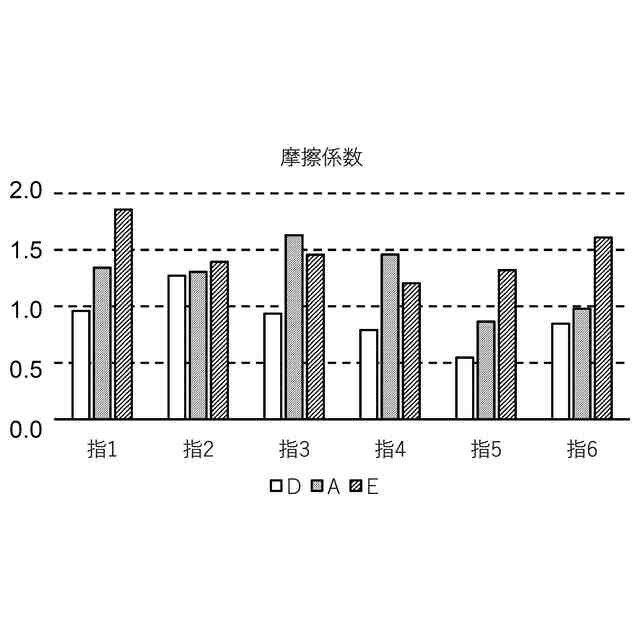
6つの接触子(指1から6)の各々について模擬肌A、D及びEの摩擦係数を並べたグラフである。
6つの接触子(指1から6)の各々について模擬肌A、F及びGの摩擦係数を並べたグラフである。
接触子3を用いて得られた7つの模擬肌の振動強度及び摩擦係数を2軸の座標上にプロットしたグラフである。
図12(a)は、接触子6と接触子2との各々について表面粗さ及び硬度が共通しており表面性状が異なる模擬肌A及びEの摩擦係数を並べたグラフであり、図12(b)は、接触子6と接触子2との各々について表面粗さ及び表面性状が共通しており硬度が異なる模擬肌A及びFの摩擦係数を並べたグラフである。
図13(a)は、接触子6と接触子2との各々について表面粗さが共通しており表面性状及び硬度が異なる模擬肌G及びEの摩擦係数を並べたグラフであり、図13(b)は、接触子6と接触子2との各々について表面粗さが共通しており表面性状及び硬度が異なる模擬肌F及びEの摩擦係数を並べたグラフである。
図14(a)は、表面粗さが共通する模擬肌A、D、E、F及びGの各々における接触子6及び接触子2の摩擦係数を2軸の座標上にプロットしたグラフであり、図14(b)は、全ての模擬肌AからGの各々における接触子6及び接触子2の摩擦係数を2軸の座標上にプロットしたグラフである。
【発明を実施するための形態】
【0010】
以下、本発明の好ましい実施形態の例について説明する。なお、以下に挙げる実施形態は例示であり、本発明は以下の実施形態の構成に限定されない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
花王株式会社
容器組立体
1日前
花王株式会社
酵素センサー
11日前
花王株式会社
シート材容器
5日前
花王株式会社
肌状態評価方法
5日前
花王株式会社
エッチング液組成物
11日前
花王株式会社
静電荷像現像用トナー
5日前
花王株式会社
経口頭皮・頭髪改善剤
7日前
花王株式会社
水系オーバーコート液
13日前
花王株式会社
固形粉末化粧料の製造方法
12日前
花王株式会社
冷感シート及びその使用方法
7日前
花王株式会社
インクジェット記録用処理液
13日前
花王株式会社
被覆用シート及びその使用方法
7日前
花王株式会社
人肌又は模擬肌の触感に関する評価方法
5日前
花王株式会社
毛孔角層の水和又は膨潤状態の評価方法
13日前
花王株式会社
液体洗浄剤組成物及び液体洗浄剤組成物の臭気低減方法
11日前
花王株式会社
レジスト剥離及びシードエッチング用の処理液及び処理方法
15日前
花王株式会社
情報処理システム
4日前
花王株式会社
遠心成形用水硬性組成物用分散剤組成物
14日前
他の特許を見る



 特許ウォッチ
特許ウォッチ