TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025121461
公報種別
公開特許公報(A)
公開日
2025-08-20
出願番号
2024016860
出願日
2024-02-07
発明の名称
ミシン
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
D05B
69/18 20060101AFI20250813BHJP(縫製;刺しゅう;タフティング)
要約
【課題】ミシンの構造の複雑化を抑制すること。
【解決手段】ミシンは、ミシンモータと、調整モータと、固定メス及び動メスを有する糸切りと、生地を前方又は後方に送る送り歯と、ミシンモータが発生した回転力に基づいて、送り歯を上下方向に往復移動させる上下送り機構と、ミシンモータが発生した回転力に基づいて、送り歯を前後方向に往復移動させる水平送り機構と、調整モータが発生した回転力に基づいて、動メスを移動する糸切り機構と、調整モータが発生した回転力に基づいて、送り歯の送り量及び送り方向を変更する送り量調整機構と、を備える。
【選択図】図19
特許請求の範囲
【請求項1】
ミシンモータと、
調整モータと、
固定メス及び動メスを有する糸切りと、
生地を前方又は後方に送る送り歯と、
前記ミシンモータが発生した回転力に基づいて、前記送り歯を上下方向に往復移動させる上下送り機構と、
前記ミシンモータが発生した回転力に基づいて、前記送り歯を前後方向に往復移動させる水平送り機構と、
前記調整モータが発生した回転力に基づいて、前記動メスを移動する糸切り機構と、
前記調整モータが発生した回転力に基づいて、前記送り歯の送り量及び送り方向を変更する送り量調整機構と、を備える、
ミシン。
続きを表示(約 1,900 文字)
【請求項2】
前記糸切り機構及び前記送り量調整機構のそれぞれは、前記調整モータの出力シャフトに連結され、
前記出力シャフトの回転角度が第1回動範囲において、前記送り歯の送り量及び送り方向が変更され、
前記出力シャフトの回転角度が第2回動範囲において、前記動メスが移動する、
請求項1に記載のミシン。
【請求項3】
前記出力シャフトが正方向に回動することにより、前記出力シャフトの回転角度が前記第1回動範囲から前記第2回動範囲に移行する、
請求項2に記載のミシン。
【請求項4】
前記第1回動範囲の中間角度から前記出力シャフトが正方向に回動することにより、生地を前方に送る送り量が大きくなり、
前記第1回動範囲の中間角度から前記出力シャフトが逆方向に回動することにより、生地を後方に送る送り量が大きくなる、
請求項3に記載のミシン。
【請求項5】
前記第2回動範囲において前記出力シャフトが正方向に回動することにより、前記動メスの刃が前記固定メスから離隔するように前記動メスが移動し、
前記第2回動範囲において前記出力シャフトが逆方向に回動することにより、前記動メスの刃が前記固定メスに接近するように前記動メスが移動する、
請求項3に記載のミシン。
【請求項6】
前記調整モータの出力シャフトに固定されるカムを備え、
前記糸切り機構及び前記送り量調整機構のそれぞれは、前記カムに連結される、
請求項1に記載のミシン。
【請求項7】
前記カムは、カム溝を有し、
前記糸切り機構は、
前記カム溝に配置されるコロと、
前記コロに回動可能に支持される糸切りアームと、
前記糸切りアームの先端部に回動可能に連結される駆動リンクと、を有し、
前記送り量調整機構は、
前記カムの端面に回動可能に連結される第1リンクと、
前記第1リンクに連結される調整アームと、
前記調整アームに連結される送り量調整体と、を有し、
前記動メスは、前記駆動リンクの回動により移動し、
前記送り歯の送り量及び送り方向は、前記送り量調整体の回動により変更される、
請求項6に記載のミシン。
【請求項8】
前記糸切り機構は、
前記駆動リンクの先端部に回動可能に連結される第1回動リンクと、
前記第1回動リンクに連結され、第1スライドピンを有する第1スライドリンクと、
前記第1スライドピンが挿入される長孔を有する第1可動部材と、を有し、
前記動メスは、前記第1可動部材に固定される、
請求項7に記載のミシン。
【請求項9】
前記糸切り機構は、
前記第1回動リンクの先端部に回動可能に連結される同期リンクと、
前記同期リンクの先端部に回動可能に連結される第2回動リンクと、
前記第2回動リンクに連結され、第2スライドピンを有する第2スライドリンクと、
前記第2スライドピンが挿入される長孔を有する第2可動部材と、を有し、
前記動メスは、2つ設けられ、
一方の動メスは、前記第1可動部材に固定され、
他方の動メスは、前記第2可動部材に固定される、
請求項8に記載のミシン。
【請求項10】
前記上下送り機構は、
前記ミシンモータが発生した回転力に基づいて回転する上下送りシャフトと、
上下送りシャフトの左端部に固定される上下送り偏心カムと、
前記上下送り偏心カムに取り付けられ、前記送り歯を保持する送り台に連結される上下送りコネクティングロッドと、を有し、
前記水平送り機構は、
前記送り量調整機構を介して前記上下送りシャフトに連結される水平送りシャフトと、
前記水平送りシャフトの左端部に固定され、前記送り台に連結される水平送りアームと、を有し、
前記送り量調整機構は、
前記上下送りシャフト及び前記送り量調整体のそれぞれに連結され、前記上下送りシャフトの全回転により前後方向に往復移動する水平送りコネクティングロッドと、
前記送り量調整体に回動可能に連結される第2リンクと、
前記水平送りシャフト及び前記第2リンクのそれぞれに連結される揺動アームと、を有する、
請求項7に記載のミシン。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、ミシンに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
ミシンに係る技術分野において、特許文献1に開示されているようなミシンが知られている。
【先行技術文献】
【特許文献】
【0003】
中国特許出願公開第111501222号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
糸切り機能と送り量調整機能と返し縫い機能とを備えるミシンにおいて、ミシンの構造の複雑化を抑制できる技術が要望される。例えば糸切り機能と返し縫い機能とが2つのアクチュエータにより実現され、送り量調整機能が手動により実現される場合、ミシンの構造が複雑化する可能性がある。
【0005】
本明細書で開示する技術は、ミシンの構造の複雑化を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本明細書は、ミシンを開示する。ミシンは、ミシンモータと、調整モータと、固定メス及び動メスを有する糸切りと、生地を前方又は後方に送る送り歯と、ミシンモータが発生した回転力に基づいて、送り歯を上下方向に往復移動させる上下送り機構と、ミシンモータが発生した回転力に基づいて、送り歯を前後方向に往復移動させる水平送り機構と、調整モータが発生した回転力に基づいて、動メスを移動する糸切り機構と、調整モータが発生した回転力に基づいて、送り歯の送り量及び送り方向を変更する送り量調整機構と、を備える。
【発明の効果】
【0007】
本明細書で開示する技術によれば、ミシンの構造の複雑化が抑制される。
【図面の簡単な説明】
【0008】
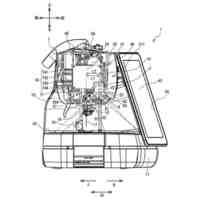
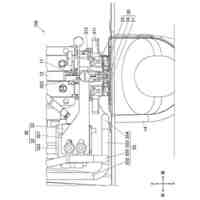
図1は、実施形態に係るミシンを後方から見た図である。
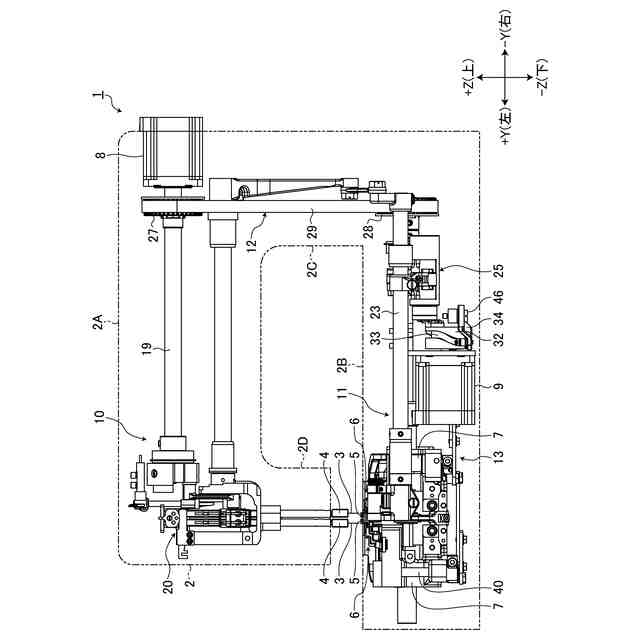
図2は、実施形態に係るミシンフレームの内部を左上後方から見た図である。
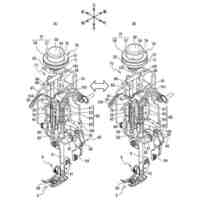
図3は、実施形態に係るベッドの内部を左上後方から見た図である。
図4は、実施形態に係るベッドの内部を右上前方から見た図である。
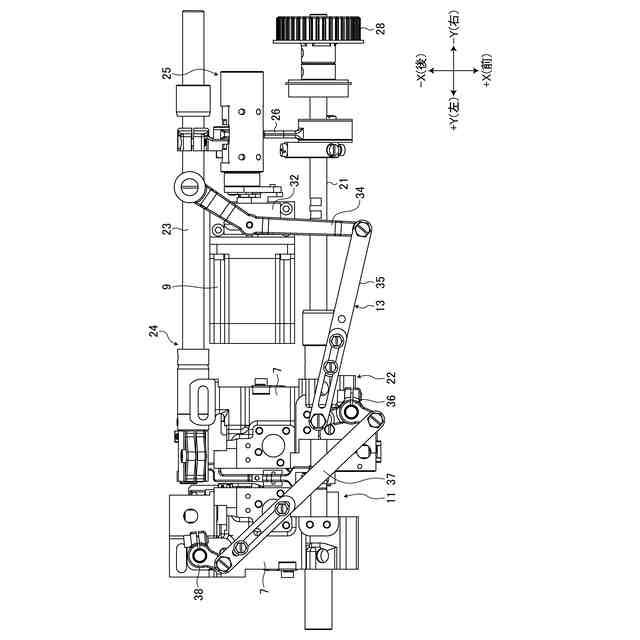
図5は、実施形態に係るベッドの内部を後方から見た図である。
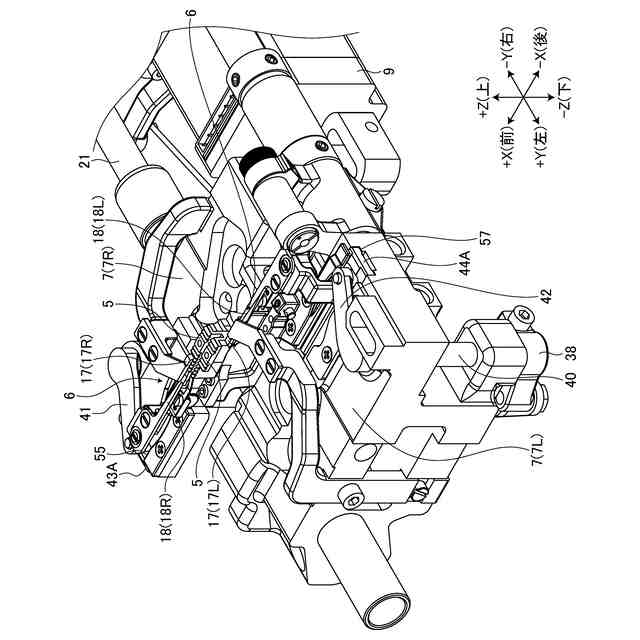
図6は、実施形態に係るベッドの内部を上方から見た図である。
図7は、実施形態に係るベッドの内部を下方から見た図である。
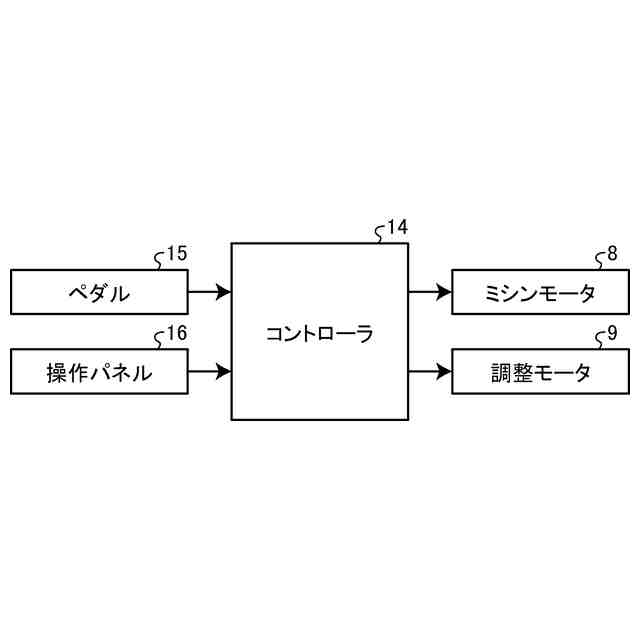
図8は、実施形態に係るミシンを示すブロック図である。
図9は、実施形態に係る糸切りを左上後方から見た図である。
図10は、実施形態に係る糸切りを上方から見た図である。
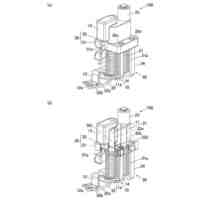
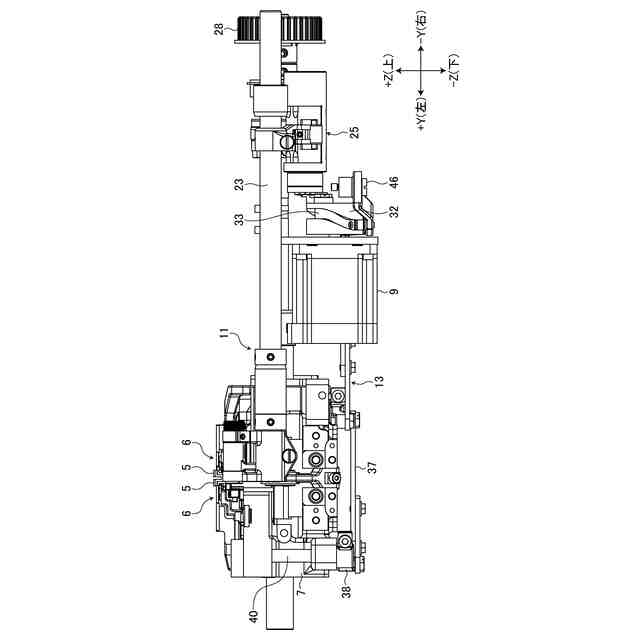
図11は、実施形態に係る糸切り機構を左上後方から見た図である。
図12は、実施形態に係る糸切り機構を右上前方から見た図である。
図13は、実施形態に係る糸切り機構を上方から見た図である。
図14は、実施形態に係る糸切り機構を下方から見た図である。
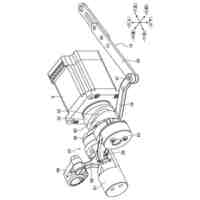
図15は、実施形態に係る生地送り機構を左上後方から見た図である。
図16は、実施形態に係る生地送り機構を右上前方から見た図である。
図17は、実施形態に係る生地送り機構を右方から見た図である。
図18は、実施形態に係る生地送り機構を左方から見た図である。
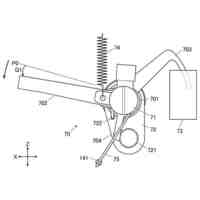
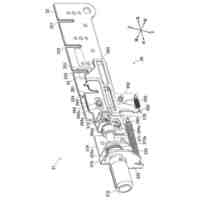
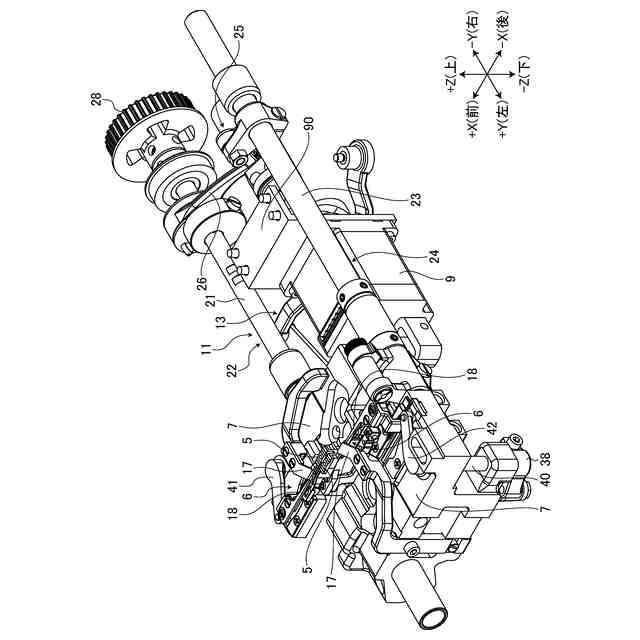
図19は、実施形態に係る糸切り機構の一部及び送り量調整機構の一部を右上前方から見た図である。
図20は、実施形態に係る糸切り機構の一部及び送り量調整機構の一部を右上前方から見た図である。
図21は、実施形態に係る糸切り機構の一部及び送り量調整機構の一部を右下前方から見た図である。
図22は、実施形態に係る糸切り機構の一部及び送り量調整機構の一部を示す分解斜視図である。
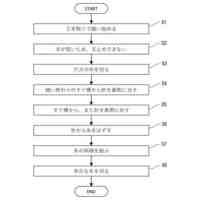
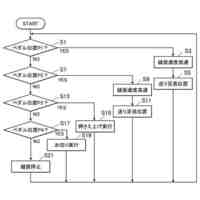
図23は、実施形態に係る糸切り機構及び送り量調整機構のそれぞれの動作を説明するためのタイミングチャートである。
図24は、実施形態に係る糸切り機構及び送り量調整機構のそれぞれの動作を説明するためのタイミングチャートである。
【発明を実施するための形態】
【0009】
以下、実施形態について図面を参照しながら説明する。実施形態においては、XYZ直交座標系を設定し、このXYZ直交座標系を参照しつつ各部の位置関係について説明する。所定面内のX軸と平行な方向をX軸方向とする。X軸と直交する所定面内のY軸と平行な方向をY軸方向とする。所定面と直交するZ軸と平行な方向をZ軸方向とする。X軸を中心とする回転方向又は傾斜方向をθX方向とする。Y軸を中心とする回転方向又は傾斜方向をθY方向とする。Z軸を中心とする回転方向又は傾斜方向をθZ方向とする。
【0010】
実施形態においては、所定面と水平面とが平行である。X軸方向は、前後方向である。Y軸方向は、左右方向である。Z軸方向は、上下方向である。+X方向は、前方向であり、-X方向は、後方向である。+Y方向は、左方向であり、-Y方向は、右方向である。+Z方向は、上方向であり、-Z方向は、下方向である。水平方向は、前後方向及び左右方向を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
JUKI株式会社
ミシン
22日前
JUKI株式会社
ミシン
15日前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ゴム繋ぎ装置
16日前
JUKI株式会社
ミシンの布押え
4日前
JUKI株式会社
差動送りミシン
22日前
JUKI株式会社
取得装置及び二本針ミシン
9日前
JUKI株式会社
実装装置及び実装装置の制御方法
2か月前
JUKI株式会社
部品実装装置及びオフセット情報取得方法
1日前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
11日前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
15日前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
15日前
JUKI株式会社
検査装置、サービス提供方法及び検査プログラムの提供方法
2か月前
株式会社バルダン
ミシン
11日前
JUKI株式会社
ミシン
4か月前
JUKI株式会社
ミシン
3か月前
ブラザー工業株式会社
ミシン
15日前
ブラザー工業株式会社
ミシン
3か月前
ブラザー工業株式会社
ミシン
4か月前
ブラザー工業株式会社
ボビン
17日前
ブラザー工業株式会社
ミシン
15日前
個人
縫製方法
2か月前
ブラザー工業株式会社
縫製装置
17日前
個人
ニードルパンチ針を使用した仮留め器具
2日前
JUKI株式会社
ミシンの布押え
4日前
JUKI株式会社
差動送りミシン
4か月前
ブラザー工業株式会社
糸巻回装置
17日前
ブラザー工業株式会社
糸巻回装置
17日前
JUKI株式会社
上下送りミシン
3か月前
株式会社PEGASUS
偏平縫いミシンの押え装置
15日前
JUKI株式会社
縁かがり縫いミシン
4か月前
JUKI株式会社
ボタン付け縫製装置
4か月前
JUKI株式会社
ミシンの糸切り装置
3か月前
株式会社PEGASUS
偏平縫いミシンの送り装置
15日前
ブラザー工業株式会社
ミシンフレーム
3か月前
JUKI株式会社
被縫製物の位置決め装置
3か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ