TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025117028
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011663
出願日
2024-01-30
発明の名称
実装装置及び実装装置の制御方法
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
H05K
13/04 20060101AFI20250804BHJP(他に分類されない電気技術)
要約
【課題】デュアルレーンデュアルヘッド型の実装装置において2つの実装ヘッドのタクト差を最適化すること。
【解決手段】実装装置の制御装置は、1枚の基板に実装する複数の電子部品Cのうち、上流側の第1実装ヘッド及び下流側の第2実装ヘッドのいずれかが実装するかの割り振りパターンを抽出し、それぞれの前記割り振りパターンについて、1枚の基板に対して実装処理を開始する際の前記第1実装ヘッドの初期高さ及び前記第2実装ヘッドの初期高さの組み合わせパターンを抽出し、それぞれの前記組み合わせパターンにおける前記第1実装ヘッド及び前記第2実装ヘッドのタクト差の絶対値を算出し、算出したそれぞれの絶対値に基づいて、いずれかの割り振りパターンをタクト差が最適化された割り振りパターンとみなして、実行する前記割り振りパターンに決定する。
【選択図】図1
特許請求の範囲
【請求項1】
並列に設けられて基板を搬送方向に搬送する複数の基板搬送装置と、
前記搬送方向の上流領域において、前記複数の基板搬送装置に搬送されるそれぞれの基板に対して電子部品を実装する第1実装ヘッドと、
前記搬送方向の下流領域において、前記第1実装ヘッドによって電子部品が実装された後の前記基板に対して更に電子部品を実装する第2実装ヘッドと、
前記第1実装ヘッド及び前記第2実装ヘッドを前記複数の基板搬送装置に亘って水平方向に移動させるとともに段階的に高さ位置を変更させるヘッド移動装置と、
各部を制御する制御装置と、
を備え、
前記制御装置は、
1枚の基板に実装する複数の電子部品Cのうち、前記第1実装ヘッド及び前記第2実装ヘッドのいずれかが実装するかの割り振りパターンを抽出し、
それぞれの前記割り振りパターンについて、1枚の基板に対して実装処理を開始する際の前記第1実装ヘッドの初期高さ及び前記第2実装ヘッドの初期高さの組み合わせパターンを抽出し、
それぞれの前記組み合わせパターンにおける前記第1実装ヘッド及び前記第2実装ヘッドのタクト差の絶対値を算出し、
算出したそれぞれの絶対値に基づいて、いずれかの割り振りパターンをタクト差が最適化された割り振りパターンとみなして、実行する前記割り振りパターンに決定する、
実装装置。
続きを表示(約 870 文字)
【請求項2】
前記制御装置は、
算出した絶対値を全ての組み合わせパターンで平均化した平均値が、最小である割り振りパターンをタクト差が最適化された割り振りパターンとみなす、
請求項1に記載の実装装置。
【請求項3】
前記制御装置は、
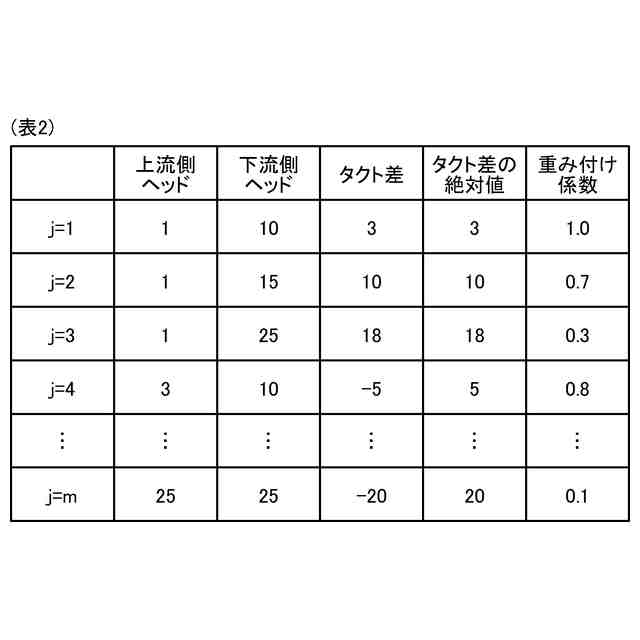
算出した絶対値に所定の重み付け係数をかけた値を全ての組み合わせパターンで平均化した平均値が、最小である割り振りパターンをタクト差が最適化された割り振りパターンとみなす、
請求項1に記載の実装装置。
【請求項4】
並列に設けられて基板を搬送方向に搬送する複数の基板搬送装置と、
前記搬送方向の上流領域において、前記複数の基板搬送装置に搬送されるそれぞれの基板に対して電子部品を実装する第1実装ヘッドと、
前記搬送方向の下流領域において、前記第1実装ヘッドによって電子部品が実装された後の前記基板に対して更に電子部品を実装する第2実装ヘッドと、
前記第1実装ヘッド及び前記第2実装ヘッドを前記複数の基板搬送装置に亘って水平方向に移動させるとともに段階的に高さ位置を変更させるヘッド移動装置と、
を備える実装装置の制御方法であって、
1枚の基板に実装する複数の電子部品Cのうち、前記第1実装ヘッド及び前記第2実装ヘッドのいずれかが実装するかの割り振りパターンを抽出することと、
それぞれの前記割り振りパターンについて、1枚の基板に対して実装処理を開始する際の前記第1実装ヘッドの初期高さ及び前記第2実装ヘッドの初期高さの組み合わせパターンを抽出することと、
それぞれの前記組み合わせパターンにおける前記第1実装ヘッド及び前記第2実装ヘッドのタクト差の絶対値を算出することと、
算出したそれぞれの絶対値に基づいて、いずれかの割り振りパターンをタクト差が最適化された割り振りパターンとみなして、実行する前記割り振りパターンに決定することと、
を含む、
実装装置の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、実装装置及び実装装置の制御方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
実装装置に係る技術分野において、複数のレーンにそれぞれ搬送される基板に対して1つ又は複数の実装ヘッドで電子部品を実装する実装装置が知られている。例えば、特許文献1には、2つのレーンのそれぞれ上流側及び下流側に合わせて4箇所の実装エリアを有し、2つのレーンに跨って移動可能な上流側の実装ヘッド及び下流側の実装ヘッドを備える実装装置が開示されている。
【0003】
このような、実装ヘッドは、低い位置にある場合より高い位置にある場合の方が、基板との距離が遠くなりノズルの上下移動距離が長くなるため、所要時間が長くなる。そこで、実装ヘッドは、レーン上の基板にまだ部品が実装されていない状況では最も低い位置を移動し、搭載されていく毎に部品に干渉しないように高い位置を移動するように制御される。
【先行技術文献】
【特許文献】
【0004】
特開2008-251586号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1のように1つの基板に対して上流側及び下流側で2つの実装ヘッドで部品を実装する実装装置では、それぞれの実装ヘッドの待機時間が最小となるように上流側及び下流側で実装する部品数を割り当てられる。しかしながら、他方のレーンを跨って通過する場合であって、他方のレーンに大きな部品がある場合、最適化の想定よりも実装ヘッドを高い位置で移動させることになり、一方の実装ヘッドの作業が遅延して、他方の実装ヘッドの待機時間が増大し、タクトタイムが増大するという課題があった。
【0006】
本明細書で開示する技術は、デュアルレーンデュアルヘッド型の実装装置において2つの実装ヘッドのタクト差を最適化することを目的とする。
【課題を解決するための手段】
【0007】
本明細書は、実装装置を開示する。実装装置は、並列に設けられて基板を搬送方向に搬送する複数の基板搬送装置と、前記搬送方向の上流領域において、前記複数の基板搬送装置に搬送されるそれぞれの基板に対して電子部品を実装する第1実装ヘッドと、前記搬送方向の下流領域において、前記第1実装ヘッドによって電子部品が実装された後の前記基板に対して更に電子部品を実装する第2実装ヘッドと、前記第1実装ヘッド及び前記第2実装ヘッドを前記複数の基板搬送装置に亘って水平方向に移動させるとともに段階的に高さ位置を変更させるヘッド移動装置と、各部を制御する制御装置と、を備え、前記制御装置は、1枚の基板に実装する複数の電子部品Cのうち、前記第1実装ヘッド及び前記第2実装ヘッドのいずれかが実装するかの割り振りパターンを抽出し、それぞれの前記割り振りパターンについて、1枚の基板に対して実装処理を開始する際の前記第1実装ヘッドの初期高さ及び前記第2実装ヘッドの初期高さの組み合わせパターンを抽出し、それぞれの前記組み合わせパターンにおける前記第1実装ヘッド及び前記第2実装ヘッドのタクト差の絶対値を算出し、算出したそれぞれの絶対値に基づいて、いずれかの割り振りパターンをタクト差が最適化された割り振りパターンとみなして、実行する前記割り振りパターンに決定する。
【0008】
本明細書は、実装装置の制御方法を開示する。実装装置の制御方法は、並列に設けられて基板を搬送方向に搬送する複数の基板搬送装置と、前記搬送方向の上流領域において、前記複数の基板搬送装置に搬送されるそれぞれの基板に対して電子部品を実装する第1実装ヘッドと、前記搬送方向の下流領域において、前記第1実装ヘッドによって電子部品が実装された後の前記基板に対して更に電子部品を実装する第2実装ヘッドと、前記第1実装ヘッド及び前記第2実装ヘッドを前記複数の基板搬送装置に亘って水平方向に移動させるとともに段階的に高さ位置を変更させるヘッド移動装置と、を備える実装装置の制御方法であって、1枚の基板に実装する複数の電子部品Cのうち、前記第1実装ヘッド及び前記第2実装ヘッドのいずれかが実装するかの割り振りパターンを抽出することと、それぞれの前記割り振りパターンについて、1枚の基板に対して実装処理を開始する際の前記第1実装ヘッドの初期高さ及び前記第2実装ヘッドの初期高さの組み合わせパターンを抽出することと、それぞれの前記組み合わせパターンにおける前記第1実装ヘッド及び前記第2実装ヘッドのタクト差の絶対値を算出することと、算出したそれぞれの絶対値に基づいて、いずれかの割り振りパターンをタクト差が最適化された割り振りパターンとみなして、実行する前記割り振りパターンに決定することと、含む。
【発明の効果】
【0009】
本明細書で開示する技術によれば、デュアルレーンデュアルヘッド型の実装装置において2つの実装ヘッドのタクト差を最適化することができる。
【図面の簡単な説明】
【0010】
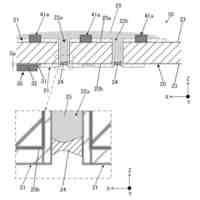
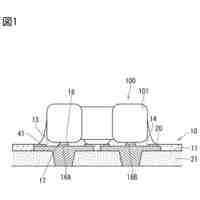
図1は、実施形態に係る実装装置を模式的に示す平面図である。
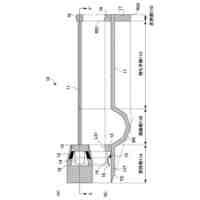
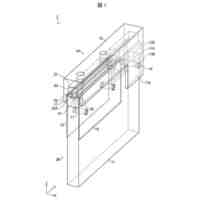
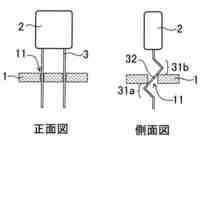
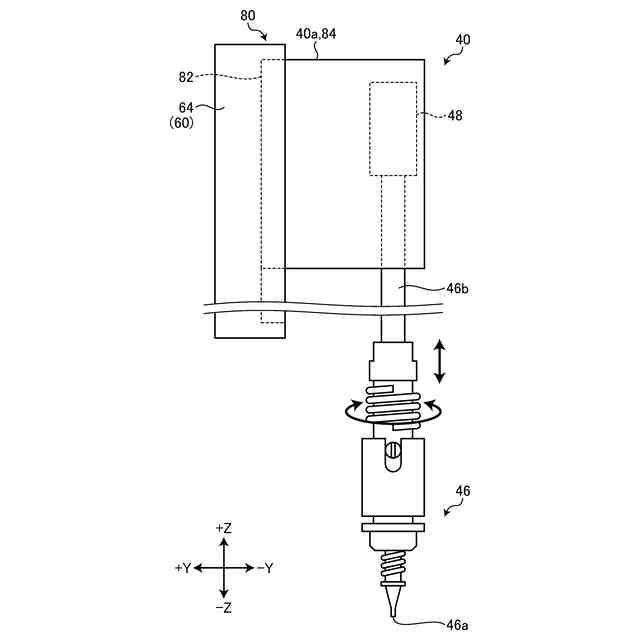
図2は、実施形態に係る実装ヘッドを示す側面図である。
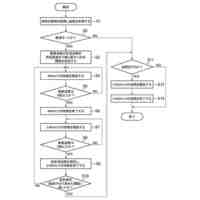
図3は、実施形態に係る実装処理を示すフローチャートである。
図4は、実施形態に係るヘッド高さ変更処理を示すフローチャートである。
図5は、実施形態に係る割り振り決定処理を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
JUKI株式会社
ミシン
22日前
JUKI株式会社
ミシン
15日前
JUKI株式会社
ミシン
2か月前
JUKI株式会社
ゴム繋ぎ装置
16日前
JUKI株式会社
ミシンの布押え
4日前
JUKI株式会社
差動送りミシン
22日前
JUKI株式会社
取得装置及び二本針ミシン
9日前
JUKI株式会社
部品実装装置及びオフセット情報取得方法
1日前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
11日前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
15日前
JUKI株式会社
3次元計測装置、部品実装装置、及び3次元計測方法
15日前
個人
電子部品の実装方法
24日前
愛知電機株式会社
装柱金具
16日前
日本精機株式会社
回路基板
1か月前
個人
電気式バーナー
8日前
個人
非衝突型ガウス加速器
2か月前
キヤノン株式会社
電子機器
1か月前
アイホン株式会社
電気機器
1か月前
イビデン株式会社
配線基板
17日前
日本放送協会
基板固定装置
1か月前
アイホン株式会社
電気機器
2か月前
メクテック株式会社
配線基板
2か月前
東レ株式会社
霧化状活性液体供給装置
1か月前
株式会社レクザム
剥離装置
16日前
イビデン株式会社
配線基板
1か月前
株式会社デンソー
電子装置
17日前
イビデン株式会社
プリント配線板
1か月前
サクサ株式会社
開き角度規制構造
15日前
シャープ株式会社
加熱機器
1日前
サクサ株式会社
筐体の壁掛け構造
1か月前
FDK株式会社
基板
23日前
オムロン株式会社
端子折り曲げ治具
26日前
新電元工業株式会社
電子装置
1か月前
日産自動車株式会社
電子部品
1か月前
富士フイルム株式会社
積層体
17日前
株式会社レゾナック
冷却装置
23日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ