TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025125322
公報種別
公開特許公報(A)
公開日
2025-08-27
出願番号
2024021297
出願日
2024-02-15
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
69/00 20060101AFI20250820BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】GNSSによる位置情報を利用して機体を自動走行させる自動走行機構を備え、作業条に沿って自動走行が可能な作業車両がある。然しながら、位置情報の受信装置とGNSS制御プログラムを搭載するとその分コスト増になると共に、作業環境や通信状況によっては位置情報が受信できず、自動走行機構が機能しなくなることがある。そこで、位置情報を使用しなくても自動走行が可能な作業車両を提供する。
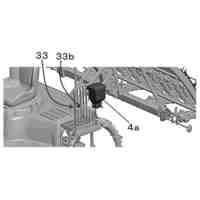
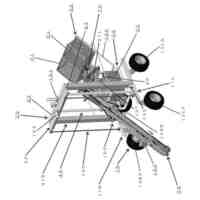
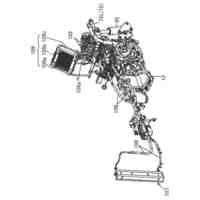
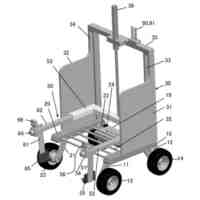
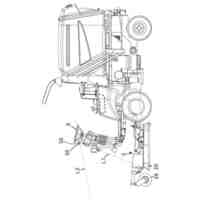
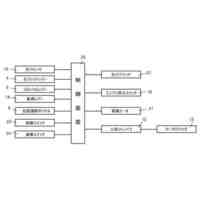
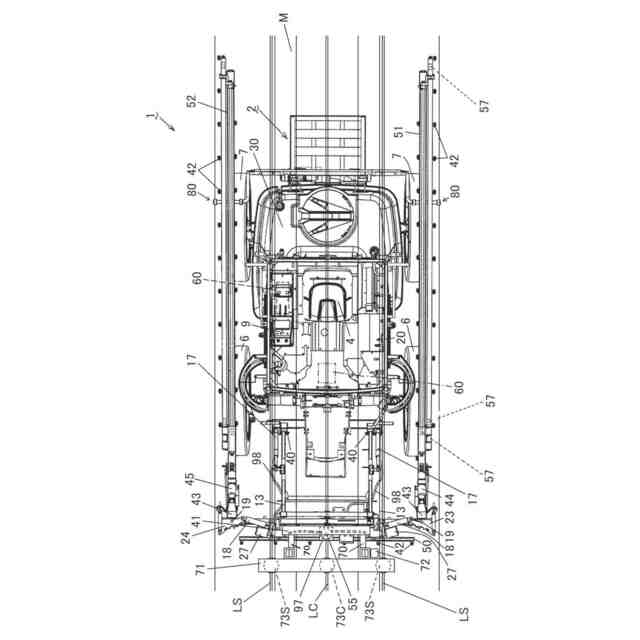
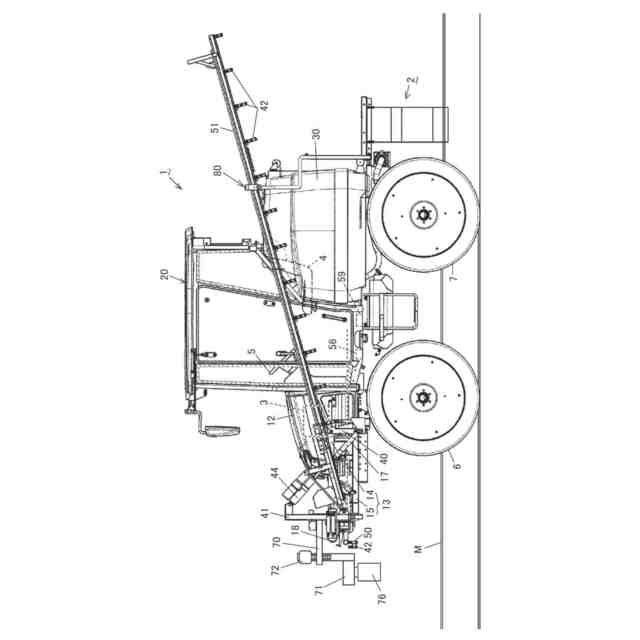
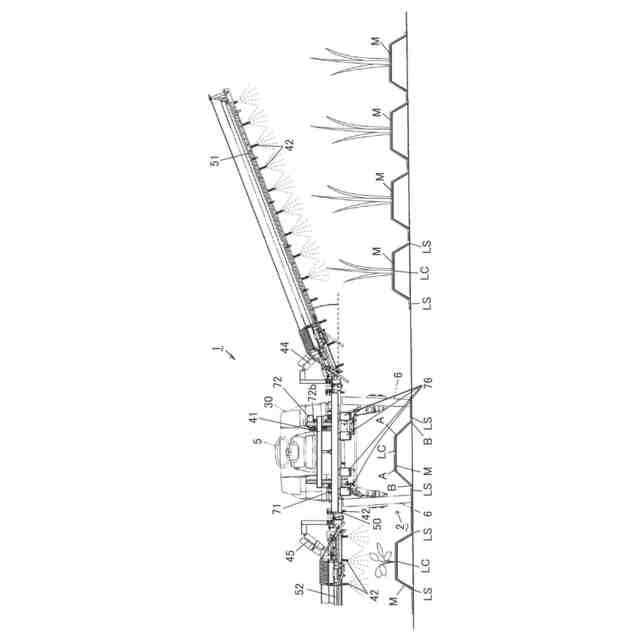
【解決手段】走行車体2の進行方向を自動操舵する自動操舵装置を設けた作業車両において、圃場に敷設したマルチフィルムMの識別体LC,LSを撮影するカメラ73C,73Sを設け、該カメラ73C,73Sの映像から識別体LC,LSを認識して映像中心からの差異を算出して自動操舵装置を作動させるコントローラ60を備える。
【選択図】図2
特許請求の範囲
【請求項1】
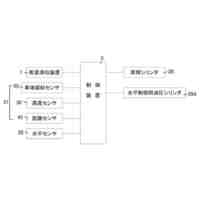
走行車体(2)の進行方向を自動操舵する自動操舵装置(5a)を設けた作業車両において、圃場に敷設したマルチフィルム(M)の識別体(LC,LS)を撮影するカメラ(73C,73S)を設け、該カメラ(73C,73S)の映像から識別体(LC,LS)を認識して映像中心からの差異を算出して自動操舵装置(5a)を作動させるコントローラ(60)を備えたことを特徴とする作業車両。
続きを表示(約 540 文字)
【請求項2】
畝の中央部に配置されるマルチフィルム(M)の中央識別体(LC)を撮影する中央検知カメラ(73C)とマルチフィルム(M)の中央部から左右方向に離れた側部の畝と畝溝の境目付近に配置される側方識別体(LS)を撮影する側方検知カメラ(73S)を設けたことを特徴とする請求項1記載の作業車両。
【請求項3】
調節操作装置(72a)にてカメラ(73C,73S)を上下位置調節または撮影距離変更自在に設けたことを特徴とする請求項1記載の作業車両。
【請求項4】
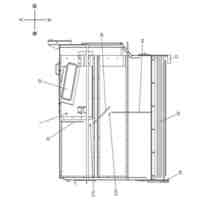
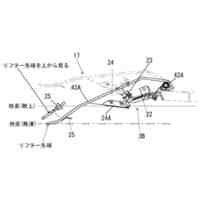
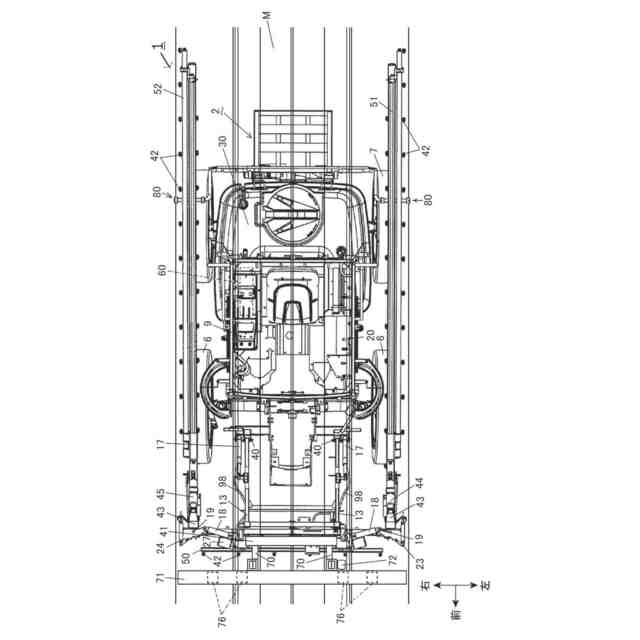
上下位置調節自在の上下動フレーム(71)に圃場面までの距離を検出する複数の距離センサ(76)を左右方向に位置調節自在に設け、該複数の距離センサ(76)が計測した距離により畝形状を算出して記録することを特徴とする請求項1~請求項3の何れか1項に記載の作業車両。
【請求項5】
距離センサ(76)のティーチング開始及び終了とティーチング情報の消去を行なうティーチングスイッチ(77)を設け、ティーチング開始から終了までの間の距離センサ(76)の距離情報から基準畝形状を設定し、該基準畝形状を基に正常な畝とみなす範囲を算出することを特徴とする請求項4記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、薬剤の散布を行なう薬剤散布機や作業機を装備したトラクタ等の作業車両に関するものである。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
GNSSによる位置情報を利用して機体を自動走行させる自動走行機構を備え、作業条に沿って自動走行が可能な作業車両がある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-097813号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
然しながら、位置情報の受信装置とGNSS制御プログラムを搭載するとその分コスト増になると共に、作業環境や通信状況によっては位置情報が受信できず、自動走行機構が機能しなくなることがある。
【0005】
本発明では、位置情報を使用しなくても自動走行が可能な作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
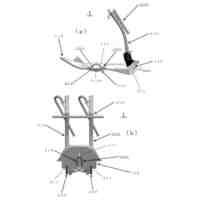
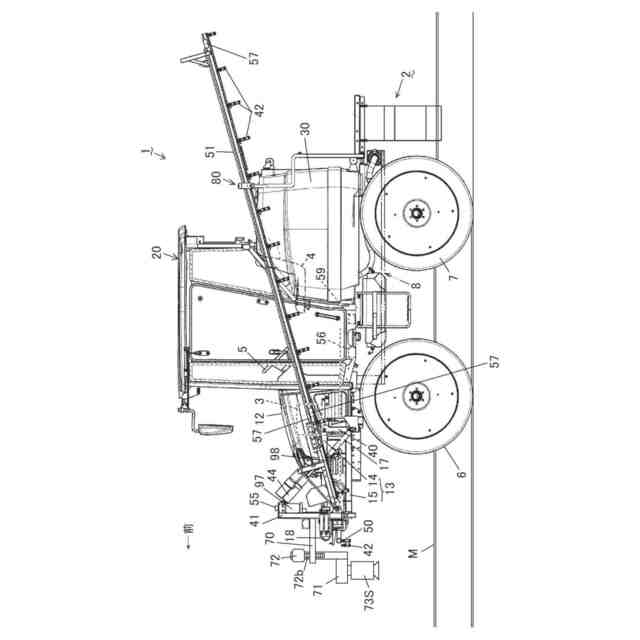
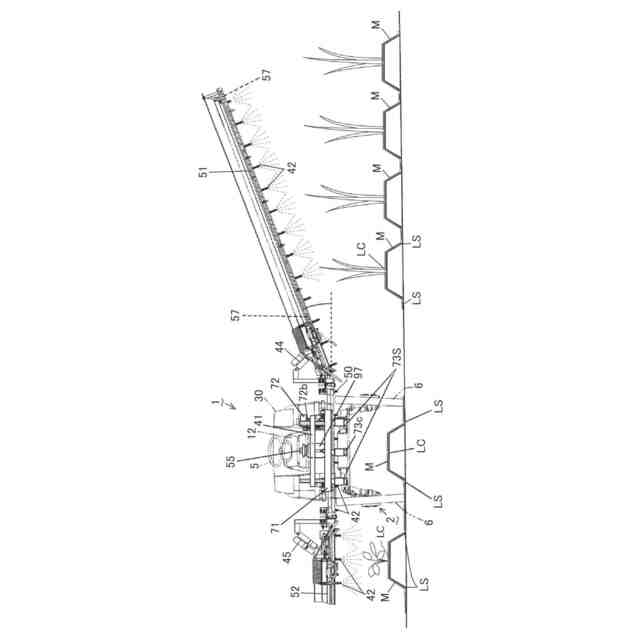
請求項1記載の発明は、走行車体2の進行方向を自動操舵する自動操舵装置5aを設けた作業車両において、圃場に敷設したマルチフィルムMの識別体LC,LSを撮影するカメラ73C,73Sを設け、該カメラ73C,73Sの映像から識別体LC,LSを認識して映像中心からの差異を算出して自動操舵装置5aを作動させるコントローラ60を備えた作業車両である。
【0007】
請求項1記載の発明によれば、マルチフィルムMの識別体LC,LSを用いて走行車体2の左右方向のずれを判定して自動操舵装置5aを作動させることにより、位置情報を使用しなくても自動走行が可能になり、作業者の労力の軽減が図れる。
【0008】
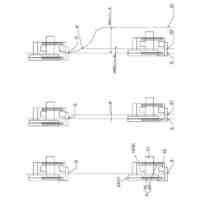
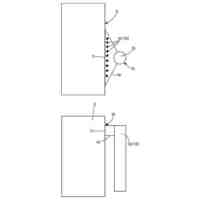
請求項2記載の発明は、畝の中央部に配置されるマルチフィルムMの中央識別体LCを撮影する中央検知カメラ73CとマルチフィルムMの中央部から左右方向に離れた側部の畝と畝溝の境目付近に配置される側方識別体LSを撮影する側方検知カメラ73Sを設けた請求項1記載の作業車両である。
【0009】
請求項2記載の発明によれば、畝上で作物が生育して中央識別体LCが覆われても、側方検知カメラ73Sで左右側部の側方識別体LSを撮影することにより、自動走行を行うことができ、作業精度が向上する。
【0010】
請求項3記載の発明は、調節操作装置72aにてカメラ73C,73Sを上下位置調節または撮影距離変更自在に設けた請求項1記載の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
17日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
10日前
井関農機株式会社
農作業車
24日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
田植え機
24日前
井関農機株式会社
作業車両
23日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
農作業車
20日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
農作業機
16日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
乗用芝刈機
16日前
井関農機株式会社
コンバイン
17日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
4日前
井関農機株式会社
歩行型耕運機
10日前
井関農機株式会社
根菜類収穫機
24日前
井関農機株式会社
汎用コンバイン
17日前
井関農機株式会社
乗用型苗移植機
10日前
井関農機株式会社
穀稈の刈取作業方法
11日前
井関農機株式会社
電動式移植作業車両
10日前
井関農機株式会社
農産物の管理システム
10日前
国立大学法人神戸大学
コンバイン
16日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
田植え機
24日前
井関農機株式会社
作業車両
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ