TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025149372
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049977
出願日
2024-03-26
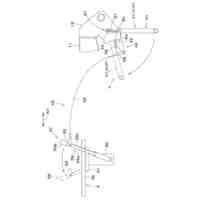
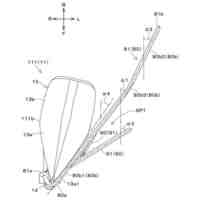
発明の名称
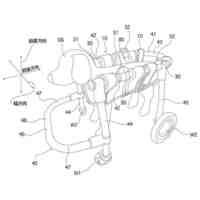
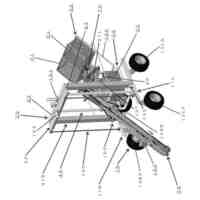
作業車両
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
69/00 20060101AFI20251001BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
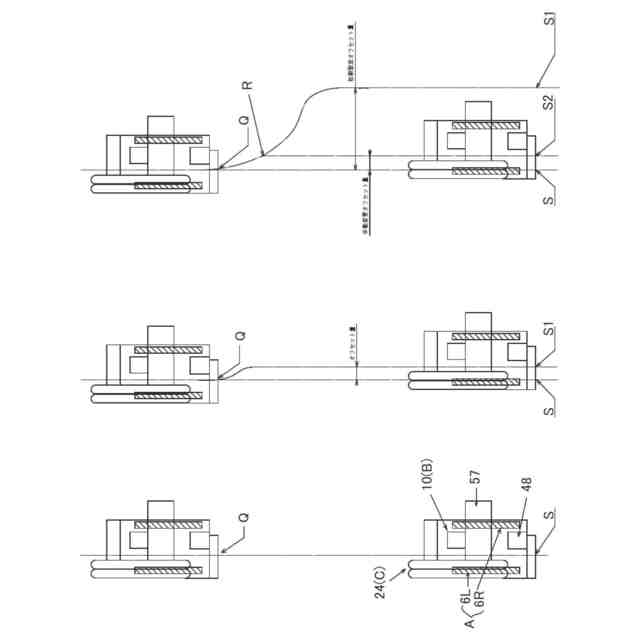
【課題】畦際からのオフセット幅を設定して、外周を前進作業で自動走行制御する作業車両がある。畦際を前進作業する際のみのオフセット自動走行制御で、後進時のオフセット自動走行制御ではない。そこで、後進時にオフセット自動走行制御をして適切な作業が行なえる作業車両を提供する。
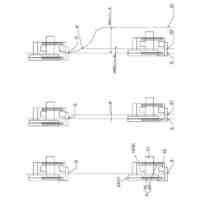
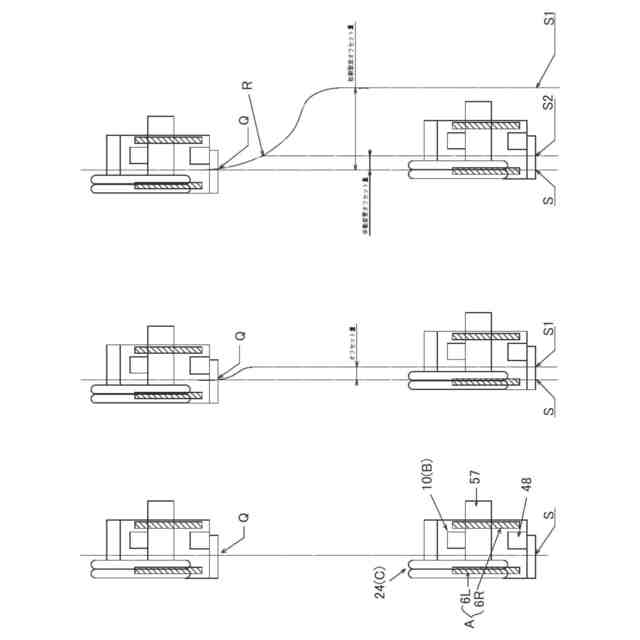
【解決手段】機体を走行させる走行部Aと操縦部Bと圃場から作物を収穫する収穫部Cを装備した作業車両において、制御装置が前進作業での作業開始地点Sと作業終了地点Qの位置情報を衛星測位装置にて算出して設定したS-Qラインを基準に所定距離左右いずれかにオフセットしたS1-Qラインを算出し、該オフセットしたS1-Qラインに沿って機体を後進させるオフセット自動後進制御モードを備える。
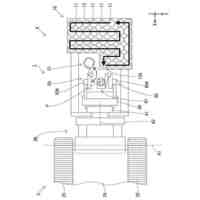
【選択図】図6
特許請求の範囲
【請求項1】
機体を走行させる走行部(A)と操縦部(B)と圃場から作物を収穫する収穫部(C)を装備した作業車両において、制御装置(70)が前進作業での作業開始地点(S)と作業終了地点(Q)の位置情報を衛星測位装置にて算出して設定したS-Qラインを基準に所定距離左右いずれかにオフセットしたS1-Qラインを算出し、該オフセットしたS1-Qラインに沿って機体を後進させるオフセット自動後進制御モードを備えたことを特徴とする作業車両。
続きを表示(約 280 文字)
【請求項2】
後進速度が所定の後進速度よりも速い場合、制御装置(70)がオフセットの所定距離を大きくすることを特徴とする請求項1記載の作業車両。
【請求項3】
自動後進制御の途中で操向操作具(13)を操作して方向変更すると自動後進制御が切れ、その後、操向操作具(13)が所定時間中立位置を保つと、制御装置(70)がその変更地点(R)の位置情報を衛星測位装置にて算出し、そのオフセット距離を算出して新たなS2-Rラインを設定し、以後、S2-Rラインに沿って機体を自動後進制御することを特徴とする請求項1または請求項2記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
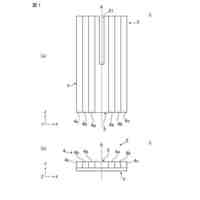
本発明は、圃場に植生する根菜類等の作物を収穫する作業車両に関するものである。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
畦際からのオフセット幅を設定して、外周を前進作業で自動走行制御する作業車両がある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-179753号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
畦際を前進作業する際のみのオフセット自動走行制御で、後進時のオフセット自動走行制御ではない。
【0005】
本発明は、上記に鑑みてなされたものであって、後進時にオフセット自動走行制御をして適切な作業が行なえる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1記載の発明は、機体を走行させる走行部Aと操縦部Bと圃場から作物を収穫する収穫部Cを装備した作業車両において、制御装置70が前進作業での作業開始地点Sと作業終了地点Qの位置情報を衛星測位装置にて算出して設定したS-Qラインを基準に所定距離左右いずれかにオフセットしたS1-Qラインを算出し、該オフセットしたS1-Qラインに沿って機体を後進させるオフセット自動後進制御モードを備えた作業車両である。
【0007】
請求項1記載の発明によれば、オフセットしたS1-Qラインに沿って機体が自動後進するので、収穫作業時に機体側方に放出した排葉物や不良作物を踏みつけて後進してしまうことが回避でき、収穫作業時に機体側方に放出した排葉物や不良作物が後進の障害となることもなく、また、畝を踏み潰して次の収穫作業条の畝に土を寄せてしまって、次の収穫作業条での収穫作業時に収穫作業の障害となることを防止することができる。
【0008】
請求項2記載の発明は、後進速度が所定の後進速度よりも速い場合、制御装置70がオフセットの所定距離を大きくする請求項1記載の作業車両である。
【0009】
請求項2記載の発明によれば、請求項1に記載の発明の効果に加えて、後進速度が速いと圃場の起伏等で車体が傾き、精度が出ないため、オフセットした内側に入る場合もあるので、後進速度が所定の後進速度よりも速い場合にオフセットの所定距離を大きくして適切なオフセット自動後進が行なえるようにできる。
【0010】
請求項3記載の発明は、自動後進制御の途中で操向操作具13を操作して方向変更すると自動後進制御が切れ、その後、操向操作具13が所定時間中立位置を保つと、制御装置70がその変更地点Rの位置情報を衛星測位装置にて算出し、そのオフセット距離を算出して新たなS2-Rラインを設定し、以後、S2-Rラインに沿って機体を自動後進制御する請求項1または請求項2記載の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
8日前
個人
四足動物用装着具
1日前
大栄工業株式会社
捕獲器
8日前
井関農機株式会社
作業車両
1日前
みのる産業株式会社
茎葉処理装置
2日前
グローブライド株式会社
釣竿
8日前
グローブライド株式会社
魚釣用リール
7日前
株式会社クボタ
移植機
1日前
株式会社クボタ
移植機
1日前
株式会社クボタ
コンバイン
9日前
株式会社クボタ
コンバイン
9日前
株式会社クボタ
コンバイン
9日前
花王株式会社
硬質表面用拭浄シート
3日前
株式会社ユシロ
光徐放性組成物、及び物品
9日前
株式会社スズテック
播種装置の移送台
7日前
株式会社クボタ
生育管理システム
2日前
株式会社神鋼環境ソリューション
供試魚投入装置
9日前
株式会社神鋼環境ソリューション
供試魚保持装置
9日前
一般社団法人ペットエンバーミングラボ
遺体保存液
8日前
住化エンバイロメンタルサイエンス株式会社
抗ウイルス剤
7日前
日本製紙クレシア株式会社
ペット用吸収性物品
7日前
井関農機株式会社
作業車両
7日前
本田技研工業株式会社
除草装置
7日前
井関農機株式会社
作業車両
9日前
住化エンバイロメンタルサイエンス株式会社
害虫防除用組成物
7日前
井関農機株式会社
作業車両
8日前
個人
鳥獣忌避具
8日前
オーティス株式会社
釣り用のおもり
2日前
カヤバ株式会社
苗木植付装置
7日前
カヤバ株式会社
苗木植付装置
7日前
カヤバ株式会社
苗木抜出装置
7日前
カヤバ株式会社
苗木植付装置
7日前
カヤバ株式会社
苗木植付装置
7日前
カヤバ株式会社
苗木植付装置
7日前
トヨタ自動車株式会社
伐倒支援装置
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ