TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025140668
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040200
出願日
2024-03-14
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01D
33/10 20060101AFI20250919BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】
収穫作業機を利用して作物をコンテナに収容する場合、圃場にコンテナを降ろしながら作業する場合があるが、このコンテナを自動で回収する作業機がなく、人が運搬車を手動で走行させながら回収する作業を行っている。
【解決手段】
圃場からコンテナをつかみ取るロボットアーム、コンテナを搬送する搬送コンベア、一時保管する載置台までの流れをスムーズに行うために、重心移動などのバランスがとれ、振動や強度にすぐれた車体構成とする。
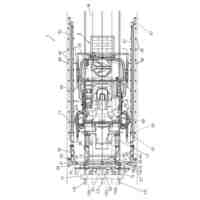
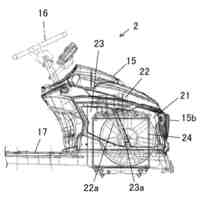
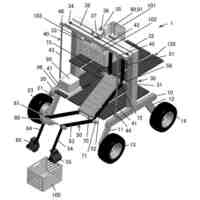
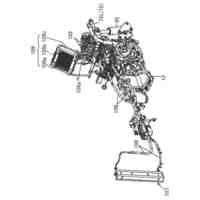
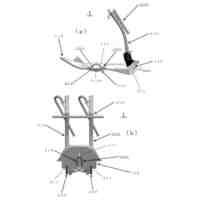
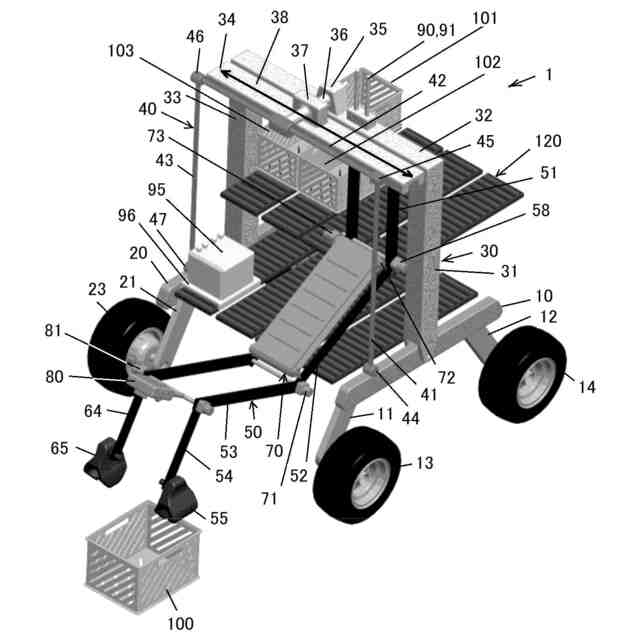
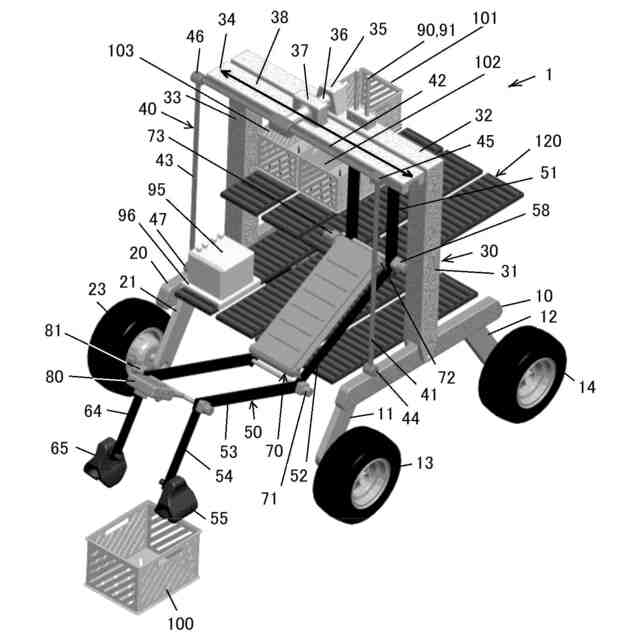
【選択図】図1
特許請求の範囲
【請求項1】
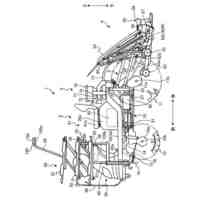
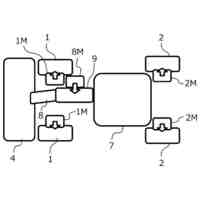
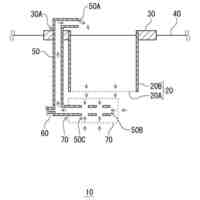
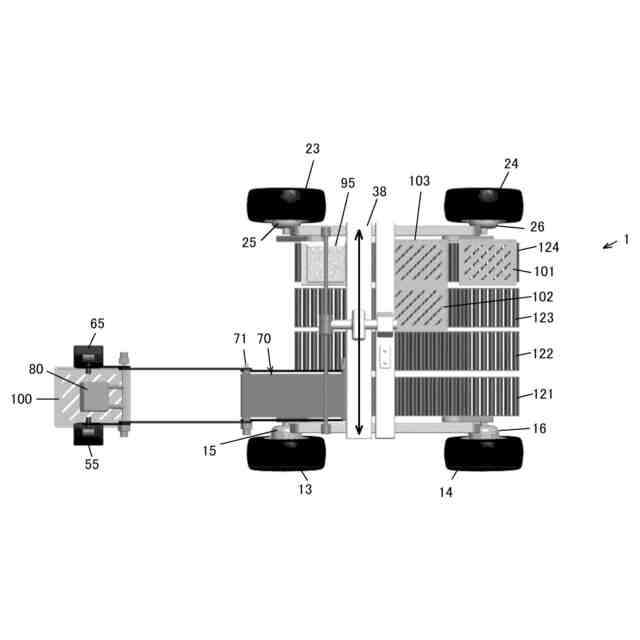
走行方向に平行な左フレーム(10)と右フレーム(20)と載置台(130)で走行底面(10M)を作り、
走行方向に垂直な作業機構(30)の門型フレームで走行方向に対し垂直に作業機機構面(30M)を作り走行底面(10M)と連結し、
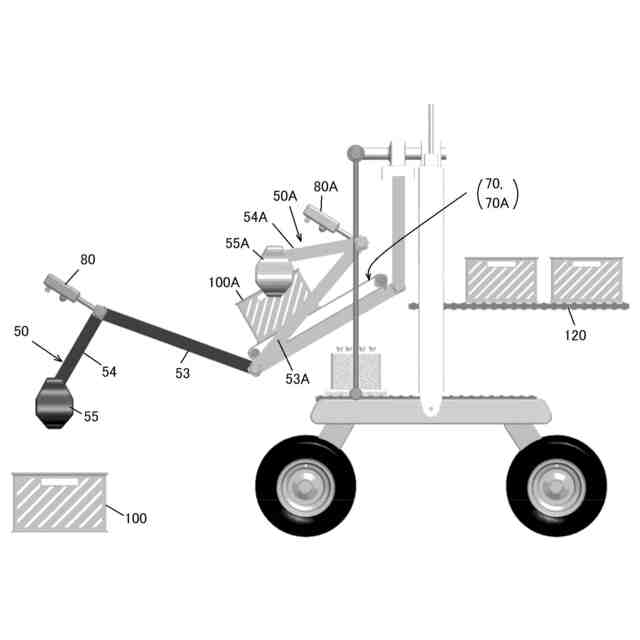
さらに走行方向に対し垂直な作業機機構面(30M)の前に、ロッカーリンク機構(40)にてロッカーリンク機構面(40M)を構成し、作業機機構面(30M)の上端部で軸受け(35)に、作業機構面(30M)とロッカーリンク機構面(40M)を一軸の連結軸(36)によって連結し、
またロッカーリンク機構(40)の下端部と左フレーム(10)と右フレーム(20)を同一直線上にない交差した状態の2つの軸を結ぶことができる継ぎ手で連結することで、
走行底面(10M)が圃場走行によって発生するゆがみを、ロッカーリンク機構(40)にて緩和すると同時に、スライドレール(34)は、ロッカーリンク機構(40)に連結し、
作業機機構面(30M)とは独立の回動を行い、スライドレール(34)を移動するロボットアーム(50)の位置移動による応力変化を受けない機構とする作業車両。
続きを表示(約 300 文字)
【請求項2】
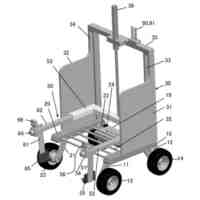
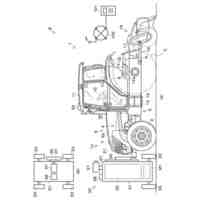
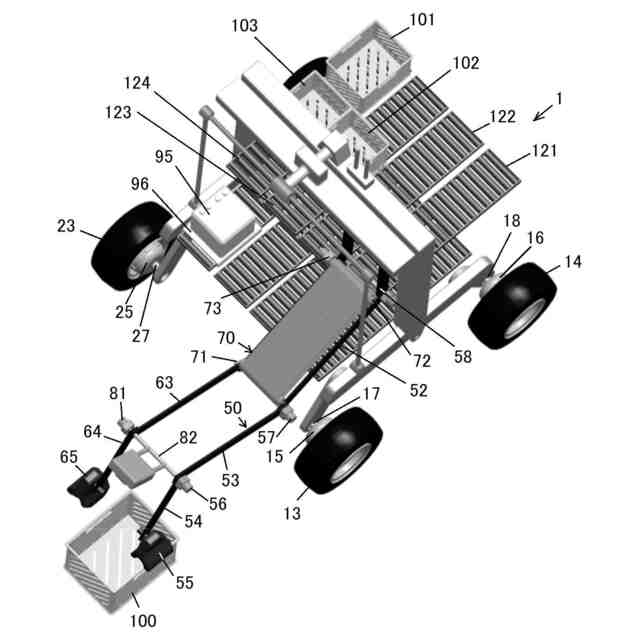
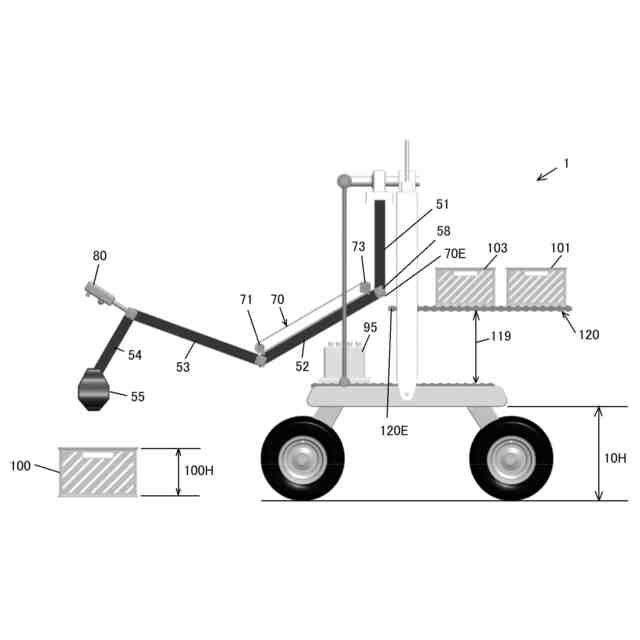
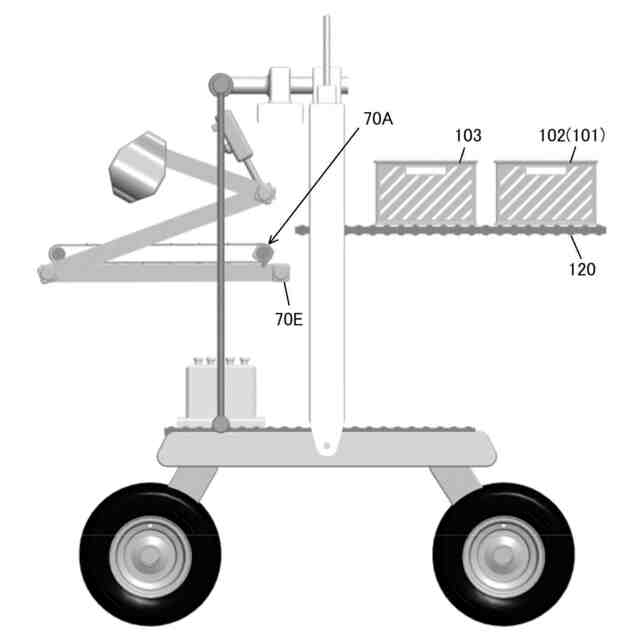
ロボットアーム(50)のアーム(52)とアーム(62)の間に搬送コンベア(70)を配置し、
搬送コンベア(70)の後端部(70E)の下方に、複数のローラコンベアを備えた載置台(120)を備え、
ローラコンベアの幅が、コンテナの横幅、あるいは搬送コンベア70の幅以下で構成された請求項1の作業車両。
【請求項3】
載置台(120)は、作業機構(30)のフレーム(31)とフレーム(33)を利用して上下移動を行い、搬送コンベア(70)の後端部(70E)が載置台(120)の上方、及び下方に移動することを可能とした請求項1、又は請求項2の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場において収穫された作物を収容したコンテナを回収する自動走行、自動積載のできる無人の作業車両に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
圃場から作物を取り出しコンテナに収容する場合、収容したコンテナの量が多く、重量もあるため圃場に降ろしながらの作業となり、収容したコンテナを無人で回収する作業車両が必要となっている。
(特許文献1)
【先行技術文献】
【特許文献】
【0003】
特開2020-121848号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術では、門型のフレームを利用し、その間を作物の収納袋を移動させる技術がある。
【0005】
しかし収納袋は形状が変形しやすく、撮像装置を利用して自動で回収させるには安定的に対応できにくい。特に吊り下げ部を検出して、その部位に吊り下げ装置を合致させることは自動では困難である。
【0006】
本発明は、形状が固定のコンテナを回収する装置とし、コンテナ回収時の重心の移動と走行の振動を緩和することで、無人運転を可能とした作業車両を提供することを課題とする。
【課題を解決するための手段】
【0007】
第一の発明は、次の技術手段により解決される。
【0008】
走行方向に平行な左フレーム10と右フレーム20と載置台130で走行底面10Mを作り、走行方向に垂直な作業機構30の門型フレームで走行方向に対し垂直に作業機機構面30Mを作り走行底面10Mと連結し、さらに走行方向に対し垂直な作業機機構面30Mの前に、ロッカーリンク機構40にてロッカーリンク機構面40Mを構成し、作業機機構面30Mの上端部で軸受け35に、作業機構面30Mとロッカーリンク機構面40Mを一軸の連結軸36によって連結し、またロッカーリンク機構40の下端部と左フレーム10と右フレーム20を同一直線上にない交差した状態の2つの軸を結ぶことができる継ぎ手で連結することで、走行底面10Mが圃場走行によって発生するゆがみを、ロッカーリンク機構40にて緩和すると同時に、スライドレール34は、ロッカーリンク機構40に連結し、作業機機構面30Mとは独立の回動を行い、スライドレール34を移動するロボットアーム50の位置移動による応力変化を受けない機構とする。
【0009】
第二の発明は、次の技術手段により解決される。
【0010】
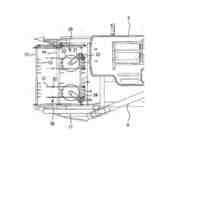
ロボットアーム50のアーム52とアーム62の間に搬送コンベア70を配置し、搬送コンベア70の後端部70Eの下方に、複数のローラコンベアを備えた載置台120を備え、ローラコンベアの幅が、コンテナの横幅、あるいは搬送コンベア70の幅以下で構成された。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
農作業車
1日前
井関農機株式会社
農作業車
5日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
田植え機
5日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
コンバイン
29日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
圃場作業機
22日前
井関農機株式会社
コンバイン
11日前
井関農機株式会社
充電システム
22日前
井関農機株式会社
根菜類収穫機
5日前
井関農機株式会社
汎用コンバイン
25日前
井関農機株式会社
乗用電動芝刈り機
12日前
井関農機株式会社
作業車両の走行経路生成システム
13日前
井関農機株式会社
バイオ燃料利用ディーゼルエンジン
27日前
井関農機株式会社
田植え機
5日前
井関農機株式会社
作業車両
1日前
個人
虫捕り器
1日前
個人
巻糸係止具
22日前
個人
植物栽培用培地
1か月前
個人
後付巻降ろし器
1日前
個人
虫の生け捕り具
1か月前
個人
飼育容器
11日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ