TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025156535
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2025130837,2023209364
出願日
2025-08-05,2023-12-12
発明の名称
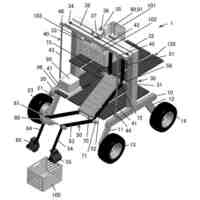
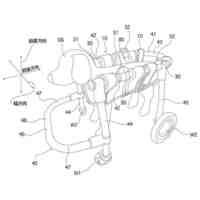
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20251002BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】容易に作業資材の補給を行う部分の圃場形状を特定できる作業車両を提供することを目的とする。
【解決手段】
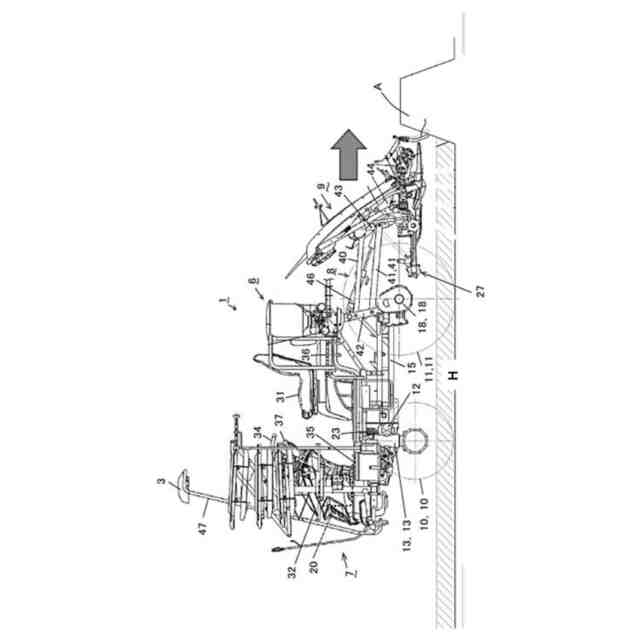
走行車体7と、走行車体7の位置を検出可能な衛星測位ユニット3と、圃場Hへ資材を供給する供給装置9と、作業者が走行車体7を圃場Hの最外部の全周に沿ってティーチング走行をさせる間に、衛星測位ユニット3のデータを利用して最外部の全周の位置情報を獲得し、自動走行するための走行経路を生成する制御部50とを備え、作業者がティーチング走行の間に行う供給装置9の供給状態を、最外部の全周の一部において他の部分と異なるように変えることで、圃場Hの最外部の全周の内、自動走行における資材の補給を行う部分の圃場形状を特定することを特徴とする作業車両。
【選択図】 図4
特許請求の範囲
【請求項1】
走行車体と、
前記走行車体の位置を検出可能な衛星測位ユニットと、
圃場へ資材を供給する供給装置と、
作業者が前記走行車体を前記圃場の最外部の全周に沿ってティーチング走行をさせる間に、前記衛星測位ユニットのデータを利用して前記最外部の全周の位置情報を獲得し、自動走行するための走行経路を生成する制御部とを備え、
作業者が、前記ティーチング走行の間に行う前記供給装置の供給状態を、前記最外部の全周の一部において他の部分と異なるように変えることで、前記圃場の最外部の全周の内、前記自動走行における資材の補給を行う部分の圃場形状を特定することを特徴とする作業車両。
続きを表示(約 430 文字)
【請求項2】
前記圃場の最外部の全周は複数の辺で構成され、
自動走行における資材の補給を行う辺では前記ティーチング走行中には前記供給装置の供給が行われず、資材の補給を行わない他の辺では前記ティーチング走行中には前記供給装置の供給が行われ、
資材の補給を行う辺の端点以外の位置情報を取得し、資材の補給を行う部分の圃場形状を特定していることを特徴とする請求項1に記載の作業車両。
【請求項3】
前記制御部は、前記資材の補給を行う辺の特定結果を利用して、前記圃場の自動走行経路を生成し、
前記資材の補給を行う辺と、前記他の辺の一部との間で往復走行する自動走行が可能であり、
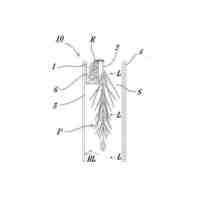
前記供給装置の供給は苗の植付け作業であって、植付け作業が行われない辺での走行において、植付け作業を行う苗植付部を実際の植付け作業状態と同様に降下させ、植付けすることなく空走りさせることを特徴とする請求項1または2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、田植機などの作業車両に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、自動走行により、圃場での作業走行を行う作業車両は、予めティーチング走行をして所定の目標走行経路を特定しておき、GNSS(Global Navi gation Satellite System)等を用いて算出した自機位置に基づいて目標走行経路に沿った自動走行を行っている(特許文献1,2)。
【先行技術文献】
【特許文献】
【0003】
特開2018-116608
特開2019-154394
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところでそのような自動走行をするにあたって、自動走行中に作業資材の補給が必要になるが、そのためには、作業資材を補給するための場所(畦)や形状は、それぞれの圃場に適した場所で行えることが求められるが、その決定の仕方がややこしく面倒であった。
【0005】
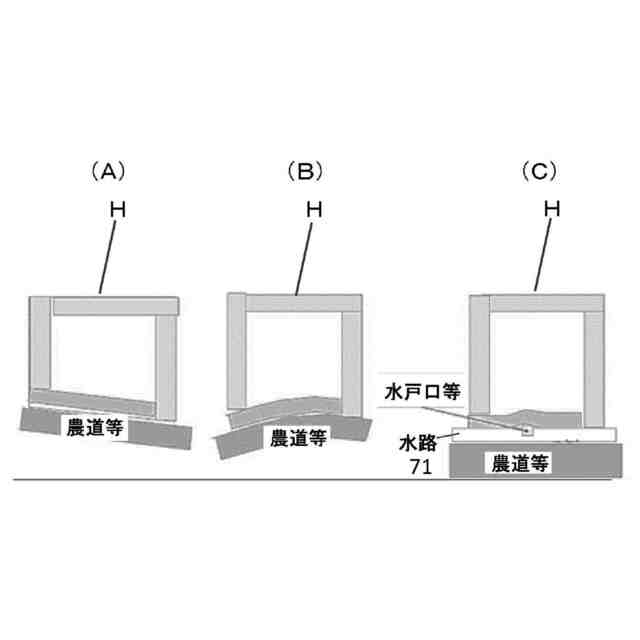
さらには次のような課題があった。例えば、図22はその一例であって、Hoは圃場であり、100は走行車体である。ティーチング走行をする場合、図(A)において、走行車体100を左下の隅から図面上上方へ作業者が乗った状態で植付しながら走行し、さらに図面上右方へ移動し、さらに図面上下方へ走行し、そこで停車して作業者は降車する。この場合下辺の畦側が作業資材を補給する畦と決定したことになる。
【0006】
その後、リモコンで自動旋回させたのち一行程飛ばした上で植付ながら自動往復走行をさせている(図B)。その場合、作業資材を補給する側の畦に戻って来た際、安全を考慮して約3m程度手前でその都度停止させる。そして補給の必要が無い場合は、作業者がリモコンで必要な位置まで苗を植付けながら前進させ、その後少し後進させた後旋回させて、自動往復走行の再開をさせている(図C)。最後に残っている内周を植付けながら自動走行させた後、作業者が乗り込み、手動で、作業資材を補給する側の畦に沿って植付けながら走行して、スタート位置に戻る(図D)。
【0007】
このようなやり方だと往復走行している際、作業資材を補給する側の畦にやって来る度に停止し、且つリモコンで前進させたり、走行再開をリモコンで指示するなど手間がかかっていた。
【0008】
本発明は、このような従来の作業車両の課題を考慮し、容易に作業資材の補給を行う部分の圃場形状を特定できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0009】
第1の本発明は、
走行車体と、
前記走行車体の位置を検出可能な衛星測位ユニットと、
圃場へ資材を供給する供給装置と、
作業者が前記走行車体を前記圃場の最外部の全周に沿ってティーチング走行をさせる間に、前記衛星測位ユニットのデータを利用して前記最外部の全周の位置情報を獲得し、自動走行するための走行経路を生成する制御部とを備え、
作業者が、前記ティーチング走行の間に行う前記供給装置の供給状態を、前記最外部の全周の一部において他の部分と異なるように変えることで、前記圃場の最外部の全周の内、前記自動走行における資材の補給を行う部分の圃場形状を特定することを特徴とする作業車両である。
【0010】
第2の本発明は、
前記圃場の最外部の全周は複数の辺で構成され、
自動走行における資材の補給を行う辺では前記ティーチング走行中には前記供給装置の供給が行われず、資材の補給を行わない他の辺では前記ティーチング走行中には前記供給装置の供給が行われ、
資材の補給を行う辺の端点以外の位置情報を取得し、資材の補給を行う部分の圃場形状を特定していることを特徴とする第1の本発明の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
コンバイン
3日前
井関農機株式会社
歩行型耕運機
9日前
井関農機株式会社
乗用型苗移植機
9日前
井関農機株式会社
電動式移植作業車両
9日前
井関農機株式会社
農産物の管理システム
9日前
井関農機株式会社
作業車両
1日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
籾摺選別機
1日前
井関農機株式会社
籾摺選別機
1日前
個人
虫捕り器
19日前
個人
草刈り鋏
1日前
個人
刈込鋏保持具
15日前
個人
後付巻降ろし器
19日前
個人
飼育容器
29日前
個人
イカ釣り用ヤエン
19日前
株式会社丹勝
緑化工法
16日前
井関農機株式会社
作業車両
17日前
株式会社シマノ
釣竿
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
9日前
個人
四足動物用装着具
2日前
個人
水耕栽培システム
29日前
大栄工業株式会社
捕獲器
9日前
株式会社オーツボ
海苔箱船
1日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
29日前
個人
妻面トラス梁付き園芸用ハウス
1か月前
松山株式会社
農作業機
15日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ