TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025126436
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024022620
出願日
2024-02-19
発明の名称
運転支援装置
出願人
株式会社SUBARU
代理人
弁理士法人太田特許事務所
主分類
B62D
6/00 20060101AFI20250822BHJP(鉄道以外の路面車両)
要約
【課題】路面の段差に対する運転支援制御に対して車両のドライバが覚える違和感を低減する技術を提供する。
【解決手段】車両の運転を支援する運転支援装置であって、一つ又は複数のプロセッサは、路面の段差に起因して車両の車輪に入力されるタイヤ力を取得し、取得したタイヤ力に基づいて、車輪の転舵に関するアシスト量を算出する。
【選択図】図4
特許請求の範囲
【請求項1】
車両の運転を支援する運転支援装置であって、
一つ又は複数のプロセッサと、前記一つ又は複数のプロセッサと通信可能に接続された一つ又は複数のメモリと、を備え、
前記一つ又は複数のプロセッサは、
路面の段差に起因して前記車両の車輪に入力されるタイヤ力を取得し、
取得した前記タイヤ力に基づいて、前記車輪の転舵に関するアシスト量を算出する、
運転支援装置。
続きを表示(約 470 文字)
【請求項2】
前記一つ又は複数のプロセッサは、
取得した前記タイヤ力のうち、前記車両の高さ方向に沿った軸周りのモーメントに基づいて、前記アシスト量を算出する、
請求項1に記載の運転支援装置。
【請求項3】
前記一つ又は複数のプロセッサは、
前記路面のカントを取得し、
取得した前記カントに基づいて、前記タイヤ力を補正する、
請求項1に記載の運転支援装置。
【請求項4】
前記一つ又は複数のプロセッサは、
取得した前記タイヤ力に基づいて、前記段差の程度を判定し、
判定した前記程度に基づいて、前記転舵に関するアシストを行うか否かを判定する、
請求項1に記載の運転支援装置。
【請求項5】
前記一つ又は複数のプロセッサは、
前記車両のドライバのステアリング操作に関する嗜好情報を取得し、
前記アシスト量を算出するにあたって、前記アシスト量に前記嗜好情報を反映させる、
請求項1に記載の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、運転支援装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
車両においては、運転支援制御に対してドライバが覚える違和感を緩和させることが求められている。
【0003】
例えば特許文献1には、車両の操向のための操作部材の操作に応じて車輪を転舵させる車両用操舵装置であって、車両が轍路を走行しているかどうかを判定する轍路判定手段と、轍路判定手段が轍路走行中であると判定したときには、轍路判定手段が轍路走行中でないと判定したときよりも、操作部材の操作に応じた車輪の転舵を促進する操舵促進制御手段とを含むことを特徴とする車両用操舵装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2007-302053号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示の技術によれば、車両が轍路を走行しているときには、車両が轍路を走行していないときに比べて車輪の転舵が促進される。しかしながら、車輪の転舵促進量は、車両が轍路を走行しているか否かに応じて一律に切り換えられる。そのため、車両のドライバは、路面の段差の性質によっては、運転支援制御に対して違和感を覚える恐れがある。
【0006】
かかる事情に鑑みてなされた本開示の目的は、路面の段差に対する運転支援制御に対して車両のドライバが覚える違和感を低減する技術を提供することにある。
【課題を解決するための手段】
【0007】
本開示の一実施形態に係る運転支援装置は、車両の運転を支援する運転支援装置であって、一つ又は複数のプロセッサと、一つ又は複数のプロセッサと通信可能に接続された一つ又は複数のメモリと、を備え、一つ又は複数のプロセッサは、路面の段差に起因して車両の車輪に入力されるタイヤ力を取得し、取得したタイヤ力に基づいて、車輪の転舵に関するアシスト量を算出する。
【発明の効果】
【0008】
本開示の一実施形態によれば、路面の段差に対する運転支援制御に対して車両のドライバが覚える違和感を低減することができる。
【図面の簡単な説明】
【0009】
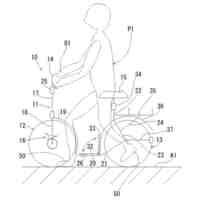
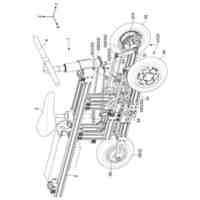
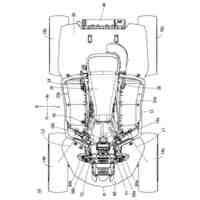
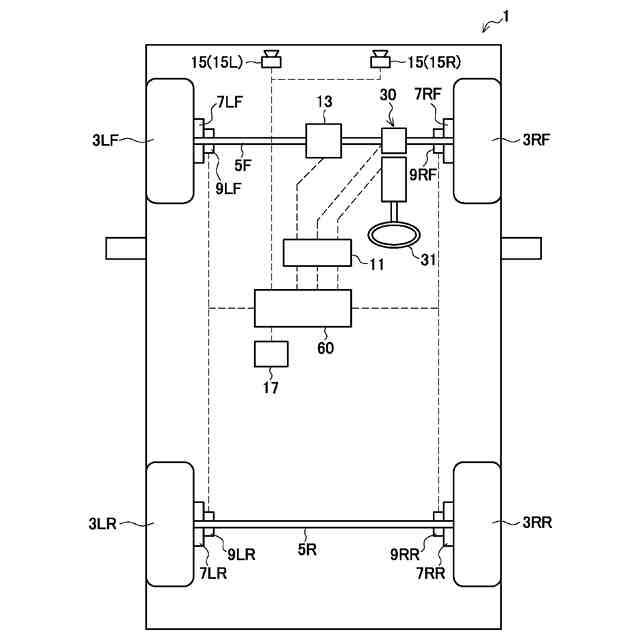
本開示の一実施形態に係る運転支援装置を備えた車両の構成例を示す模式図である。
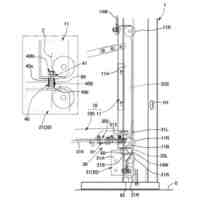
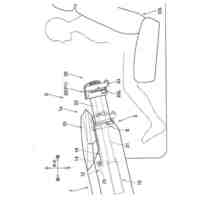
図1に示される車両に備えられた電動ステアリングシステムの構成例を示す模式図である。
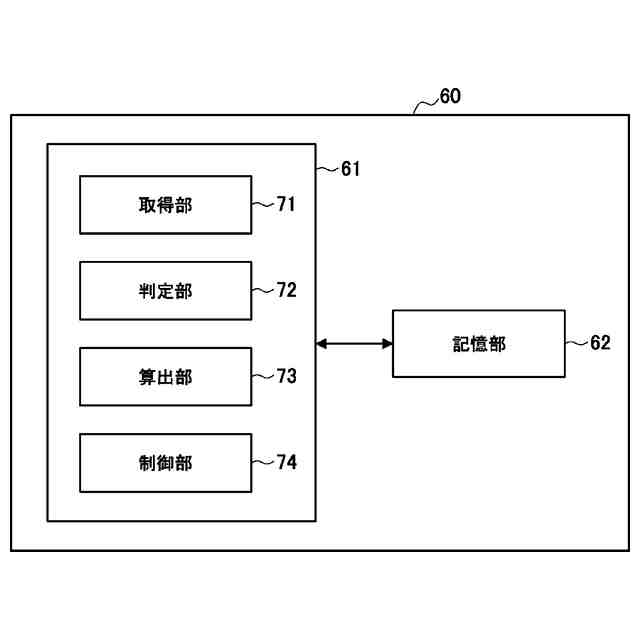
本開示の第1の実施の形態に係る運転支援装置の構成例を示すブロック図である。
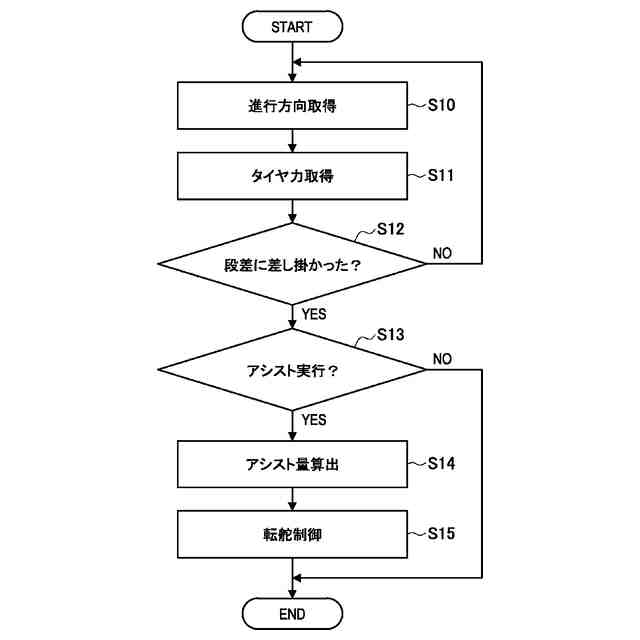
本開示の第1の実施の形態に係る運転支援装置の動作例を説明するフローチャートである。
図4に示される動作例における車両の状況を説明する図である。
図5に示される右前輪に加えられる荷重の一例を説明する図である。
図5に示される右前輪に加えられる荷重の一例を説明する図である。
本開示の第2の実施の形態に係る運転支援装置の構成例を示すブロック図である。
本開示の第2の実施の形態に係る運転支援装置の動作例を説明するフローチャートである。
本開示の変形例における車両の状況を説明する図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カート
1か月前
個人
走行装置
2か月前
個人
電動走行車両
2か月前
個人
乗り物
3か月前
個人
発音装置
5か月前
個人
折り畳み自転車
9か月前
個人
閂式ハンドル錠
2か月前
個人
電動モビリティ
6か月前
個人
自転車用傘捕捉具
10か月前
個人
ボギー・フレーム
11日前
個人
ルーフ付きトライク
1か月前
個人
“zen-go.”
1か月前
個人
ルーフ付きトライク
3日前
個人
自由方向乗車自転車
6か月前
個人
体重掛けリフト台車
9か月前
個人
パワーアシスト自転車
12日前
個人
キャンピングトライク
7か月前
個人
アタッチメント
10か月前
個人
自転車用荷物台
9か月前
株式会社CPM
駐輪機
10か月前
個人
ステアリングの操向部材
7か月前
株式会社三五
リアサブフレーム
8か月前
株式会社豊田自動織機
産業車両
2か月前
個人
フロントフットブレーキ。
2か月前
学校法人千葉工業大学
車両
8か月前
ヤマハ発動機株式会社
車両
10か月前
ダイハツ工業株式会社
車両
11か月前
豊田合成株式会社
操舵装置
10か月前
ヤマハ発動機株式会社
車両
10か月前
個人
ホイールハブ駆動構造
2か月前
豊田鉄工株式会社
小型車両
1か月前
学校法人千葉工業大学
車両
8か月前
ヤマハ発動機株式会社
車両
10か月前
ヤマハ発動機株式会社
車両
10か月前
学校法人千葉工業大学
車両
8か月前
個人
二輪車の三次元折りたたみ機構
13日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ