TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025148711
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024048968
出願日
2024-03-26
発明の名称
障害物の検出方法
出願人
株式会社熊谷組
代理人
個人
主分類
G05D
1/622 20240101AFI20251001BHJP(制御;調整)
要約
【課題】移動体の移動において不要な停止を回避しつつ容易に障害物の検出を可能とする移動体の障害物検出方法を提供する。
【解決手段】移動体の移動の障害となる障害物として検出する障害物の検出方法であって、移動体を上方から平面視したときの移動体に対し、一方が移動体の前後方向、他方が左右方向と平行な座標軸からなる直交座標系を設定するステップと、各辺が前記座標軸のいずれかと平行な方形の監視範囲を、平面視した静止状態にある移動体を囲むように前記直交座標系上に設定するステップと、前記移動体が移動しているときは、方形を維持しつつ、前記監視範囲を形成する辺のうち移動方向側にある辺を、移動速度の大きさに応じて、該辺に直交する座標軸に沿って移動させるステップと、を含む態様とした。
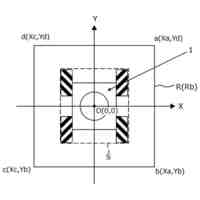
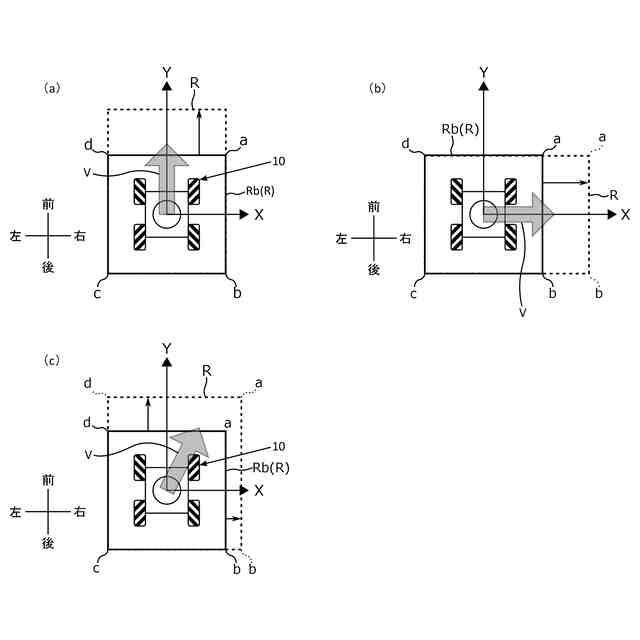
【選択図】図6
特許請求の範囲
【請求項1】
床面を静止状態から全方位に移動可能とされた移動体から、該移動体を基準として周囲にある物体までの距離を測定し、測定した距離が移動体の周囲に設定された監視範囲内にあるかどうかを判別し、測定した距離が監視範囲内に含まれる場合に、移動体の移動の障害となる障害物として検出する障害物の検出方法であって、
移動体を上方から平面視したときの移動体に対し、一方の座標軸が移動体の前後方向、他方の座標軸が左右方向と平行な直交座標系を設定するステップと、
平面視した移動体を囲むように、各辺が前記座標軸のいずれかと平行な方形の監視範囲を前記直交座標系上に設定するステップと、
前記移動体が移動しているときに、方形を維持しつつ、前記監視範囲を形成する辺のうち移動方向側にある辺を、移動速度の大きさに応じて、該辺に直交する座標軸に沿って移動方向に移動させるステップと、
を含むことを特徴とする障害物の検出方法。
続きを表示(約 830 文字)
【請求項2】
ステアリング機構を備え、ステアリング動作によって床面を移動可能とされた移動体から、該移動体を基準として周囲にある物体までの距離を測定し、測定した距離が移動体の周囲に設定された監視範囲内にあるかどうかを判別し、測定した距離が監視範囲内に含まれる場合に、移動体の移動の障害となる障害物として検出する障害物の検出方法であって、
移動体を上方から平面視したときの移動体に対し、一方の座標軸が移動体の前後方向、他方の座標軸が左右方向と平行な直交座標系を設定するステップと、
平面視した移動体を囲むように、各辺が前記座標軸のいずれかと平行な方形の監視範囲を前記直交座標系上に設定するステップと、
前記移動体が移動しているときは、方形を維持しつつ、移動体の前側若しくは後側のうち移動方向側の辺を移動速度の大きさに応じて該辺に直交する座標軸に沿って移動させるとともに移動体の右側若しくは左側の辺のうち移動方向側の辺をステアリング機構の操舵角の大きさに応じて該辺に直交する座標軸に沿って操舵方向に移動させるステップと、
を含むことを特徴とする障害物の検出方法。
【請求項3】
移動体を上方から平面視したときの移動体の中心に前記直交座標系の原点を設定することを特徴とする請求項1又は請求項2に記載の障害物の検出方法。
【請求項4】
前記監視範囲内に測定した距離が含まれたときに、前記監視範囲を一方の座標軸で分割したときの2つの区画のうちのいずれか、若しくは、他方の座標軸で分割したときの2つの区画のうちのいずれかに含まれているかを判別するステップと、
4つの各区画において測定した距離が含まれた回数を計数するステップと、
4つの各区画で係数された回数が所定回に達した時に移動体の移動の停止を促すステップと、
を含むことを特徴とする請求項3に記載の障害物の検出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体が床面を移動するときの障害となる障害物を自動的に検出するための障害物の検出方法に関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
従来、特許文献1に記載されるような全方位に移動可能な移動体が知られている。このような移動体には、自機の周囲360°の障害物までの距離を測定できる距離センサ(例えばLiDARなど)が搭載されており、自律的な走行を可能にしている。
このような自律走行可能な移動体は、自律走行中に人を含む予期せぬ障害物に接触しないようにするための仕組みを備えていることが求められている。例えば、図16(a)の破線で示す範囲(監視範囲)R内において、距離センサが障害物を検出した時には、緊急停止する仕組みの採用が考えられる。
【先行技術文献】
【特許文献】
【0003】
特開2024-19997号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、移動体が低速で移動する場合であれば障害物の監視範囲Rを図16(a)の広さに設定しても十分安全を確保できるものの、高速で移動する場合には、この範囲では狭く、障害物を検出してから停止行動をとっても停止が間に合わずに接触する、といった事態が想定される。そこで、障害物の監視範囲Rを、図16(b)に示す一点鎖線に示すように広げることで、高速で移動したとしても停止できるようにするといった対応が考えられる。しかし、単純に監視範囲Rを単純に広げてしまうと、今度は接触の危険性がない障害物を検出した際も緊急停止してしまい、効率良く移動体が移動できないということになってしまう。
また、距離センサによる障害物の検出は、ノイズの影響を受けることが知られており、複数回の障害物の検出によって緊急停止する仕組みを備えているものも知られているが、このような対策は障害物が検知範囲に入ってからも暫くは停止できないことを意味することにもなり得る。
そこで、本発明では、上記種々の問題に鑑み、簡易な方法で、移動体の移動において不要な停止を回避しつつ容易に障害物の検出を可能とする移動体の障害物検出方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するための障害物の検出方法の態様として、床面を静止状態から全方位に移動可能とされた移動体から、該移動体を基準として周囲にある物体までの距離を測定し、測定した距離が移動体の周囲に設定された監視範囲内にあるかどうかを判別し、測定した距離が監視範囲内に含まれる場合に、移動体の移動の障害となる障害物として検出する障害物の検出方法であって、移動体を上方から平面視したときの移動体に対し、一方の座標軸が移動体の前後方向、他方の座標軸が左右方向と平行な直交座標系を設定するステップと、平面視した移動体を囲むように、各辺が前記座標軸のいずれかと平行な方形の監視範囲を前記直交座標系上に設定するステップと、前記移動体が移動しているときに、方形を維持しつつ、前記監視範囲を形成する辺のうち移動方向側にある辺を、移動速度の大きさに応じて、該辺に直交する座標軸に沿って移動方向に移動させるステップと、を含む態様とした。
本態様によれば、簡易な実装で障害物の誤検出を防ぎつつ必要なときに緊急停止することができるようになった。
また、上記課題を解決するための障害物の検出方法の他の態様として、ステアリング機構を備え、ステアリング動作によって床面を移動可能とされた移動体から、該移動体を基準として周囲にある物体までの距離を測定し、測定した距離が移動体の周囲に設定された監視範囲内にあるかどうかを判別し、測定した距離が監視範囲内に含まれる場合に、移動体の移動の障害となる障害物として検出する障害物の検出方法であって、移動体を上方から平面視したときの移動体に対し、一方の座標軸が移動体の前後方向、他方の座標軸が左右方向と平行な直交座標系を設定するステップと、平面視した移動体を囲むように、各辺が前記座標軸のいずれかと平行な方形の監視範囲を前記直交座標系上に設定するステップと、前記移動体が移動しているときは、方形を維持しつつ、移動体の前側若しくは後側のうち移動方向側の辺を移動速度の大きさに応じて該辺に直交する座標軸に沿って移動させるとともに移動体の右側若しくは左側の辺のうち移動方向側の辺をステアリング機構の操舵角の大きさに応じて該辺に直交する座標軸に沿って操舵方向に移動させるステップと、を含む態様とした。
本態様によれば、簡易な実装で障害物の誤検出を防ぎつつ必要なときに緊急停止することができるようになった。
また、上記課題を解決するための障害物の検出方法の他の態様として、移動体を上方から平面視したときの移動体の中心に前記直交座標系の原点を設定する態様とした。
本態様によれば、障害物を検出するための処理を容易にすることができる。
また、上記課題を解決するための障害物の検出方法の他の態様として、前記監視範囲内に測定した距離が含まれたときに、前記監視範囲を一方の座標軸で分割したときの2つの区画のうちのいずれか、若しくは、他方の座標軸で分割したときの2つの区画のうちのいずれかに含まれているかを判別するステップと、4つの各区画において測定した距離が含まれた回数を計数するステップと、4つの各区画で係数された回数が所定回に達した時に移動体の移動の停止を促すステップと、を含む態様とした。
本態様によれば、この拡張させた範囲内で複数回の検知を行うことで、衝突前に緊急停止ができるようになる。
【図面の簡単な説明】
【0006】
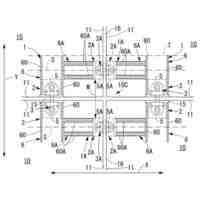
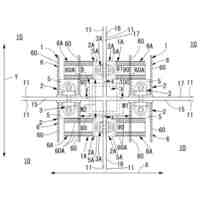
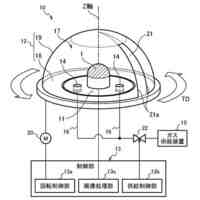
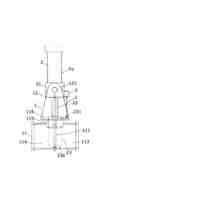
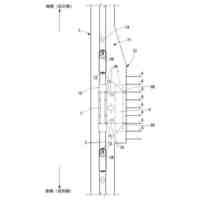
本実施形態に係る移動体の障害物検出方法が適用された移動体の概略構成を示す平面図である。
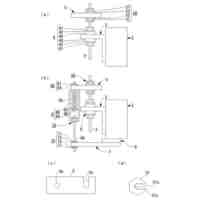
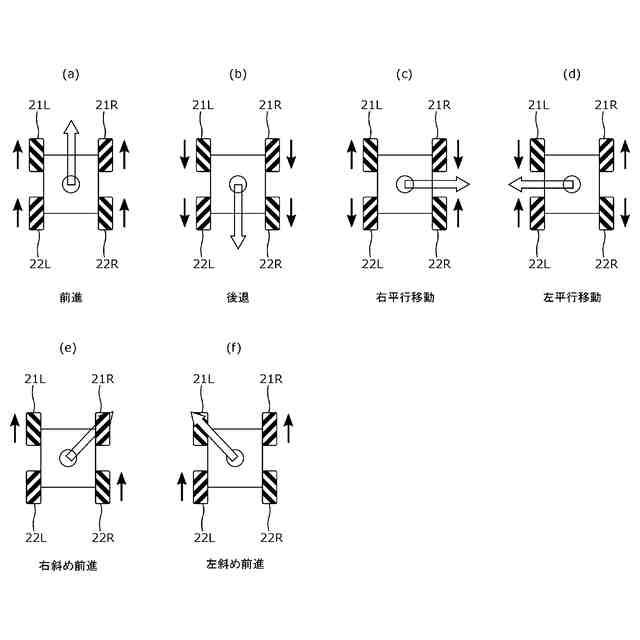
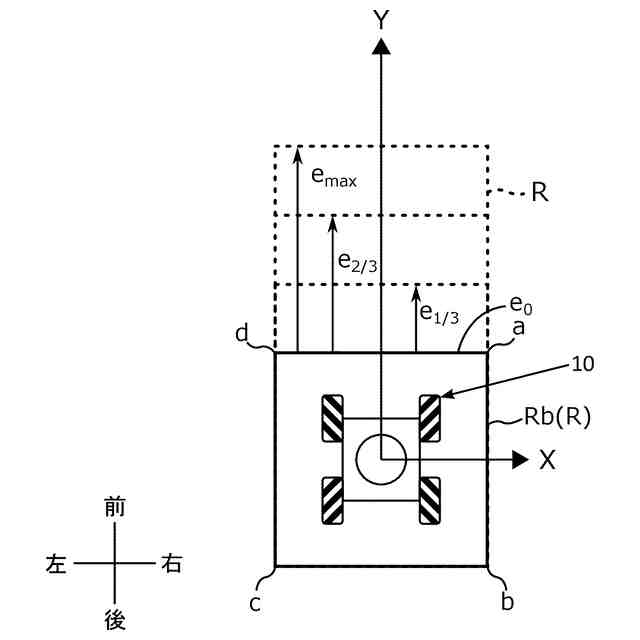
本実施形態に係る移動体の移動特性を示した図である。
制御装置のハードウェア構成の一例を示す図である。
制御装置の構成を示すブロック図である。
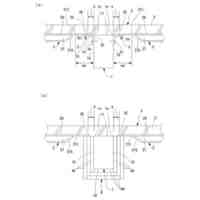
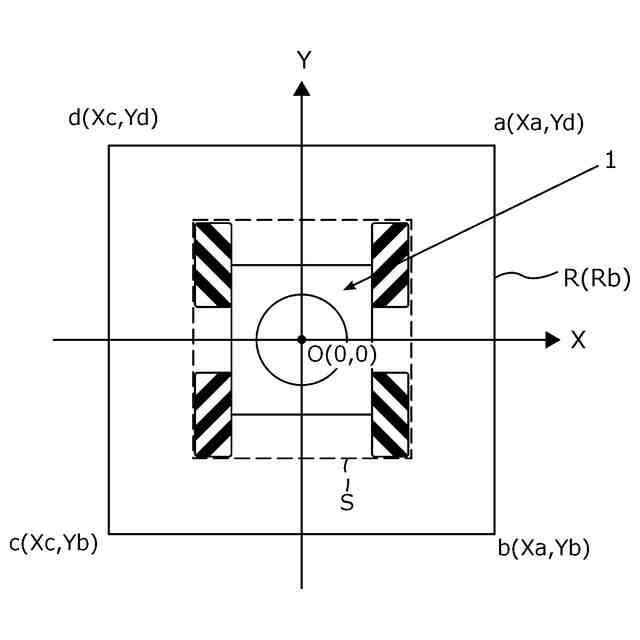
障害物の検出処理に係る座標系の設定を示す図である。
移動体に対して監視範囲を設定した概念図である。
移動方向による監視範囲の変化例を示す図である。
移動速度による監視範囲の変化例を示す図である。
障害物の検出位置を特定するための処理を示す概念図である。
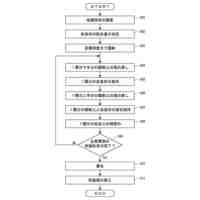
障害物検出処理手段における処理の一例を示すフローチャートである。
図10に示すフローチャートにおける処理を補足する図である。
図10に示すフローチャートにおける処理を補足する図である。
図10に示すフローチャートにおける処理を補足する図である。
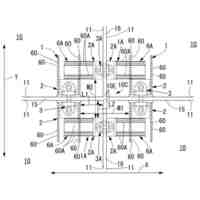
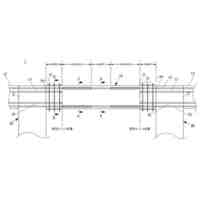
移動体における移動手段の他の形態を示す図である。
図9に示すフローチャートにおける変更部分を示す図である。
従来の監視範囲を示す図である。
【0007】
以下、発明の実施形態を通じて本発明を詳説するが、以下の実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態の中で説明される特徴の組み合わせのすべてが発明の解決手段に必須であるとは限らず、選択的に採用される構成を含むものである。
【発明を実施するための形態】
【0008】
本実施形態に係る障害物の検出方法は、例えば、自律的に床面FL上を移動可能に構成された移動体1が、壁や床に置かれたものなどの障害物との衝突を回避するために、障害物を検出するための処理を備えた方法である。
【0009】
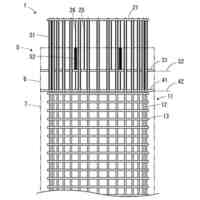
図1は、本実施形態に係る障害物の検出方法が適用された移動体1の概略構成を示す平面図である。
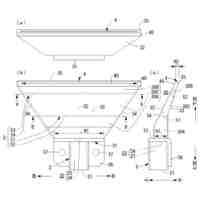
図1に示すように、移動体1は、移動対象面である床面FLのひび割れや傷などの状態の検査をするための検査装置として構成されている。移動体1は、例えば、基体10と、移動手段20と、障害物を検出するためのセンサ30と、床面FLを撮影するための撮像装置40と、制御装置50とを備えている。
【0010】
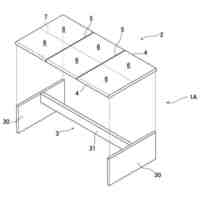
基体10は、収容空間を有する6面体の箱型とされ、収容空間にはバッテリー12、制御装置50、操作パネル57などが収容される。基体10は、上面が開閉できる構造とされ、これを開けることでバッテリー12や制御装置50、操作パネル57などにアクセス可能とされている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社熊谷組
床版
今日
株式会社熊谷組
床版
今日
株式会社熊谷組
長机
8日前
株式会社熊谷組
ノズル
2か月前
株式会社熊谷組
吊り治具
7日前
株式会社熊谷組
床構成材
今日
株式会社熊谷組
木質材料
20日前
株式会社熊谷組
RI計測装置
8日前
株式会社熊谷組
密度計測方法
8日前
株式会社熊谷組
木材接合部材
7日前
株式会社熊谷組
床版接合構造
10日前
株式会社熊谷組
地盤改良方法
2日前
株式会社熊谷組
障害物の検出方法
1日前
株式会社熊谷組
鉄筋コンクリート梁
29日前
株式会社熊谷組
観測装置の防塵装置
2か月前
株式会社熊谷組
観測装置の防塵装置
2か月前
株式会社熊谷組
コンクリート打設装置
21日前
株式会社熊谷組
コンクリート打設装置
21日前
株式会社熊谷組
床版、及び、床版接合方法
4か月前
株式会社熊谷組
アクアポニックスシステム
6日前
株式会社熊谷組
床版継手装置、及び、床版
10日前
株式会社熊谷組
杭頭処理構造、杭頭処理方法
10日前
株式会社熊谷組
吊り下げ物の防振構造改良方法
10日前
株式会社熊谷組
壁体構築方法およびアンカー部材
10日前
株式会社熊谷組
壁体構築方法および鉄筋連結構造
10日前
株式会社熊谷組
耐火構造、及び、耐火構造の施工方法
今日
株式会社熊谷組
骨材管理システムおよび骨材管理方法
2か月前
国立大学法人東北大学
重金属の不溶化方法
7日前
岐阜工業株式会社
コンクリート用流量調整弁
6日前
ベルテクス株式会社
コンクリート部材の継手構造
6日前
株式会社熊谷組
床版、及び、床版製造方法、並びに、床版接合構造
4か月前
株式会社熊谷組
トンネル坑内での重量物横移動方法及び重量物横移動装置
28日前
株式会社熊谷組
傾斜地用コンクリート打設装置へのコンクリート積込方法
21日前
ベルテクス株式会社
コンクリート部材の取付構造とその成型に用いる抜き型
6日前
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ