TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152186
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024053965
出願日
2024-03-28
発明の名称
作業機械および方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
9/00 20060101AFI20251002BHJP(水工;基礎;土砂の移送)
要約
【課題】小容量の蓄電装置を用いて余剰電力を吸収する。
【解決手段】制御装置は、作業機械を駆動させるための必要電力が高い場合、前記必要電力が低い場合に比べて、蓄電装置の充電率が低くなるように目標充電率を決定する。制御装置は、蓄電装置の現在の充電率と目標充電率とに基づいて、蓄電装置の充電率を目標充電率に近づけるための制御電力を算出する。制御装置は、必要電力と制御電力との和に基づいて、燃料電池の目標発電電力を決定する。
【選択図】図5
特許請求の範囲
【請求項1】
燃料電池と蓄電装置とを備える作業機械であって、
制御装置を備え、
前記制御装置は、
前記作業機械を駆動させるための必要電力が高い場合、前記必要電力が低い場合に比べて前記蓄電装置の充電率が低くなるように目標充電率を決定し、
前記蓄電装置の現在の充電率と前記目標充電率とに基づいて、前記蓄電装置の充電率を前記目標充電率に近づけるための制御電力を算出し、
前記必要電力と前記制御電力との和に基づいて、前記燃料電池の目標発電電力を決定する、
作業機械。
続きを表示(約 630 文字)
【請求項2】
前記制御装置は、
前記作業機械を駆動させるための必要電力が高いほど、前記蓄電装置の充電率が低くなるように目標充電率を決定する、
請求項1に記載の作業機械。
【請求項3】
前記制御装置は、
前記必要電力と前記燃料電池の発電電力との差に応じて、前記蓄電装置の充放電指令を出力する、
請求項1に記載の作業機械。
【請求項4】
前記制御装置は、
前記燃料電池の目標発電電力の許容変化率に従って、前記必要電力と前記制御電力との和を制限することで前記目標発電電力を計算する、
請求項1に記載の作業機械。
【請求項5】
前記目標充電率は、前記燃料電池の発電電力が前記必要電力からゼロになるまでに発生する発電電力を充電可能な充電率以下である、
請求項1に記載の作業機械。
【請求項6】
燃料電池と蓄電装置とを備える作業機械を制御するための方法であって、
前記作業機械を駆動させるための必要電力が高い場合、前記必要電力が低い場合に比べて前記蓄電装置の充電率が低くなるように目標充電率を決定し、
前記蓄電装置の現在の充電率と前記目標充電率とに基づいて、前記蓄電装置の充電率を前記目標充電率に近づけるための制御電力を算出し、
前記必要電力と前記制御電力との和に基づいて、前記燃料電池の目標発電電力を決定する、
方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械および方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に示すように、水素を燃料として用いる燃料電池を搭載する作業機械が検討されている。燃料電池を動力源とする作業機械は、燃料電池が発電した余剰電力を充電し、また燃料電池が発電した電力の不足分を補うために放電するバッテリを備える。
【先行技術文献】
【特許文献】
【0003】
特開2023-144222号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
蓄電装置が十分に充電されている場合、燃料電池からの余剰電力を蓄電装置に充電することができない可能性がある。一方で、作業機械に搭載される蓄電装置は、コストやサイズの観点から小容量化が望まれている。
【0005】
本開示の目的は、小容量の蓄電装置を用いて余剰電力を吸収することができる作業機械および方法を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一態様によれば、燃料電池と蓄電装置とを備える作業機械であって、制御装置を備え、前記制御装置は、前記作業機械を駆動させるための必要電力が高い場合、前記必要電力が低い場合に比べて、前記蓄電装置の充電率が低くなるように目標充電率を決定し、前記蓄電装置の現在の充電率と前記目標充電率とに基づいて、前記蓄電装置の充電率を前記目標充電率に近づけるための制御電力を算出し、前記必要電力と前記制御電力との和に基づいて、前記燃料電池の目標発電電力を決定する。
【発明の効果】
【0007】
上記態様によれば、作業機械は、小容量の蓄電装置を用いて余剰電力を吸収することができる。
【図面の簡単な説明】
【0008】
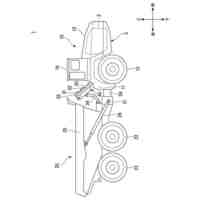
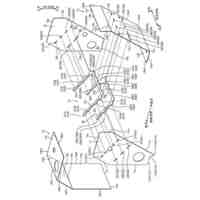
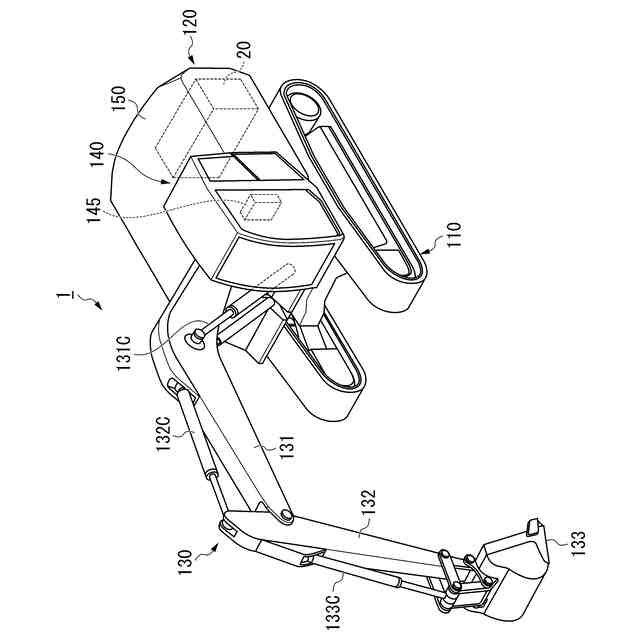
第一実施形態に係る作業機械の斜視図である。
第一実施形態に係る作業機械の運転室の構成を示す概略図である。
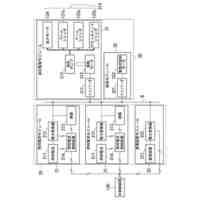
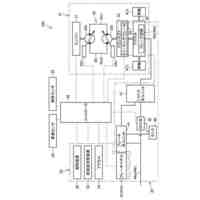
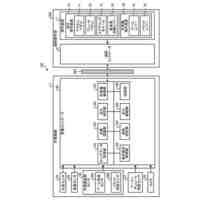
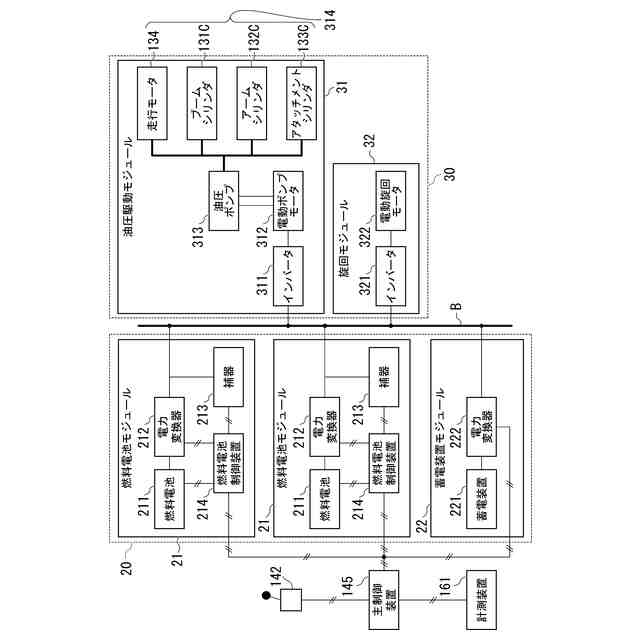
第一実施形態に係る作業機械の構成を示す概略ブロック図である。
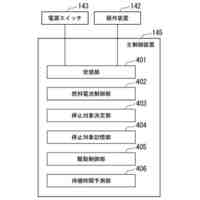
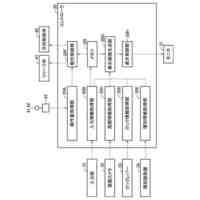
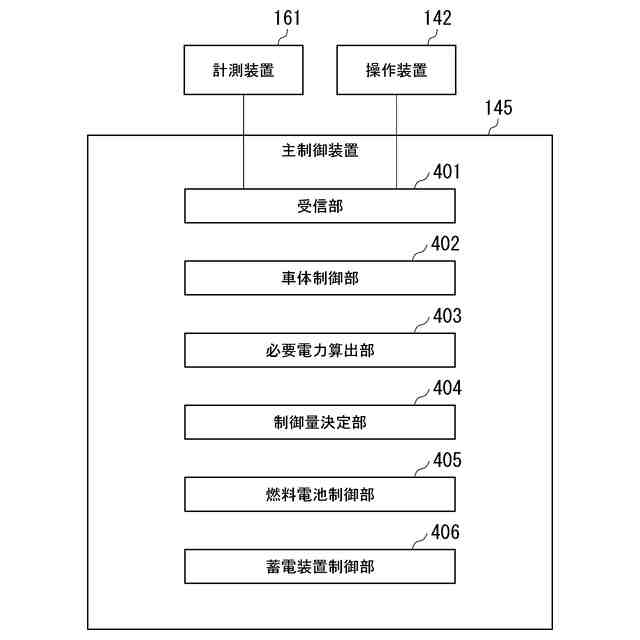
第一実施形態に係る主制御装置の構成を示す概略ブロック図である。
第一実施形態に係る制御量決定部による演算アルゴリズムを示すブロック図である。
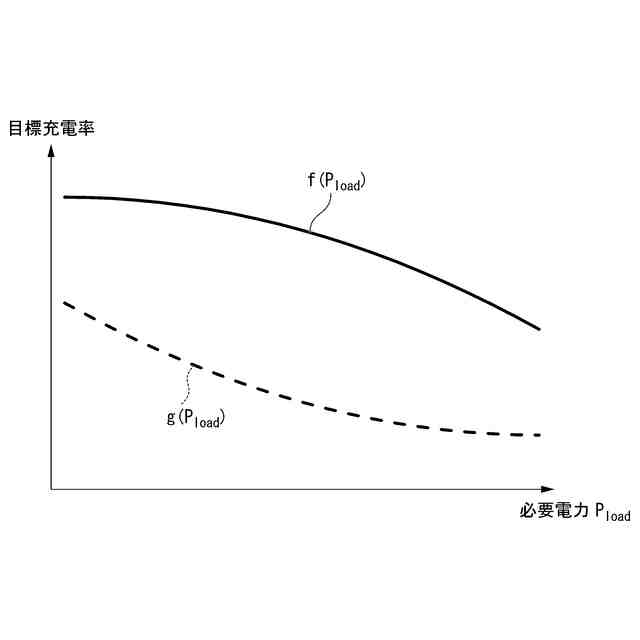
第一実施形態に係る必要電力から目標充電率を算出するための変換関数の一例を示す図である。
第一実施形態における確保すべき空き容量の例を示す図である。
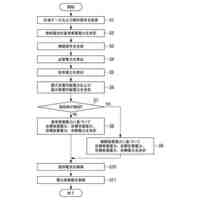
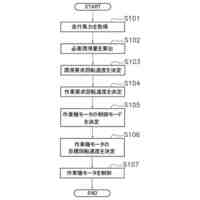
第一実施形態に係る作業機械の制御方法を示すフローチャートである。
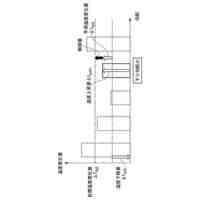
第二実施形態に係る作業機械の側面図である。
第二実施形態に係る作業機械の運転室の構成を示す概略図である。
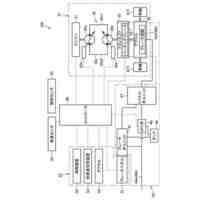
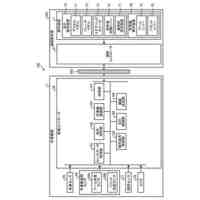
第二実施形態に係る作業機械の構成を示す概略ブロック図である。
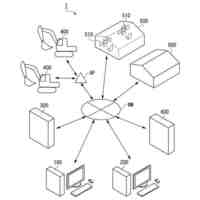
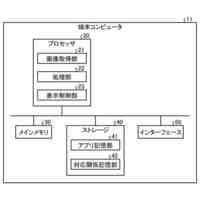
少なくとも1つの実施形態に係るコンピュータの構成を示す概略ブロック図である。
他の実施形態に係る変換関数の例を示す第1の図である。
他の実施形態に係る変換関数の例を示す第2の図である。
他の実施形態に係る変換関数の例を示す第3の図である。
他の実施形態に係る変換関数の例を示す第4の図である。
【発明を実施するための形態】
【0009】
〈第一実施形態〉
《作業機械1の構成》
図1は、第一実施形態に係る作業機械1の斜視図である。第一実施形態に係る作業機械1は、例えば油圧ショベルである。作業機械1は、走行体110と、旋回体120と、作業機130と、運転室140と、主制御装置145とを備える。油圧ショベルである作業機械1は、作業現場等において土砂などを掘削、整地する。走行体110と旋回体120とは、車体を構成する。
【0010】
走行体110は、作業機械1を走行可能に支持する。走行体110は、左右一対の履帯を有する。作業機械1は一対の履帯の回転により前進し、旋回し、または後進する。
旋回体120は、走行体110に旋回可能に支持される。旋回体120は、後述する電動旋回モータ322によって、走行体110に対して旋回する。旋回体120は、作業機130と、運転室140と、機械室150と、燃料電池システム20とを支持する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業車両
17日前
株式会社小松製作所
作業機械および方法
6日前
株式会社小松製作所
作業機械および方法
6日前
株式会社小松製作所
作業機械および方法
6日前
株式会社小松製作所
作業機械および方法
7日前
株式会社小松製作所
発注システムおよび発注方法
8日前
株式会社小松製作所
発注システムおよび発注方法
8日前
株式会社小松製作所
作業車両および作業車両の制御方法
6日前
株式会社小松製作所
作業機械および作業機械の制御方法
6日前
株式会社小松製作所
作業車両用作動油タンク及び作業車両
14日前
株式会社小松製作所
油圧駆動システムおよび油圧駆動方法
7日前
株式会社小松製作所
システム、作業機械、および制御方法
6日前
株式会社小松製作所
作業車両の制御システム及び作業車両
6日前
株式会社小松製作所
作業機械システムおよび作業機械の制御方法
7日前
株式会社小松製作所
作業機械システムおよび作業機械の制御方法
7日前
株式会社小松製作所
作業機械の点検支援システム及び点検支援方法
6日前
株式会社小松製作所
作業機械、及び、作業機械を制御するための方法
9日前
株式会社小松製作所
散水システム、散水機械および散水装置の制御方法
8日前
株式会社小松製作所
散水システム、作業機械および散水装置の制御方法
8日前
株式会社小松製作所
感情推定装置、感情推定方法および遠隔操作システム
9日前
株式会社小松製作所
認証情報表示システム、情報端末、及び認証情報表示方法
6日前
株式会社小松製作所
作業機械、作業機械のシステムおよび作業機械の制御方法
8日前
株式会社小松製作所
作業機械、作業機械のシステムおよび作業機械の制御方法
8日前
株式会社小松製作所
作業機械の画像表示システムおよび作業機械の画像表示方法
15日前
株式会社小松製作所
作業機械の暖房装置、および作業機械の暖房装置の制御方法
7日前
株式会社小松製作所
作業機械の表示システム、作業機械、及び作業機械の表示方法
8日前
株式会社小松製作所
故障した作業機械の故障原因を診断するためのシステム及び方法
17日前
株式会社小松製作所
表示制御装置、情報端末、表示制御方法、及び表示制御システム
6日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
6日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
6日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
7日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
7日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
7日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
7日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
7日前
FKS株式会社
擁壁
17日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ