TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025152564
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024054510
出願日
2024-03-28
発明の名称
作業車両の制御システム及び作業車両
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
9/20 20060101AFI20251002BHJP(水工;基礎;土砂の移送)
要約
【課題】伝送状況が不良な状況において、作業効率が低下することを低減することを目的とすること。
【解決手段】作業車両の制御システム1は、作業機を備えた作業車両が施工する現場を撮像する撮像装置128と、撮像装置128が撮像した画像を、作業車両を遠隔で操作する遠隔操作室に送信する通信装置129と、画像を遠隔操作室に備えられた表示装置200に表示させる表示制御部221と、作業車両と遠隔操作室との間のデータの伝送状況を検知する伝送状況検知部11と、作業車両の作業状態を検出する作業状態検出部12と、伝送状況と、作業状態とに基づいて、作業車両の作業を継続するか否かを判定する作業継続判定部15と、作業継続判定部15によって作業を継続すると判定された場合、作業車両の作業を継続させるよう制御する作業機制御部17と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
作業機を備えた作業車両が施工する現場を撮像する撮像装置と、
前記撮像装置が撮像した画像を、前記作業車両を遠隔で操作する遠隔操作室に送信する通信装置と、
前記画像を前記遠隔操作室に備えられた表示装置に表示させる表示制御部と、
前記作業車両と前記遠隔操作室との間のデータの伝送状況を検知する伝送状況検知部と、
前記作業車両の作業状態を検出する作業状態検出部と、
前記伝送状況と、前記作業状態とに基づいて、前記作業車両の作業を継続するか否かを判定する作業継続判定部と、
前記作業継続判定部によって作業を継続すると判定された場合、前記作業車両の作業を継続させるよう制御する作業機制御部と、
を備える作業車両の制御システム。
続きを表示(約 980 文字)
【請求項2】
前記作業状態検出部は、前記作業車両の姿勢を示す車両データ、前記作業車両を操作する操作装置に対する操作を示す操作データ、前記作業車両の作業の施工対象の目標形状を示す設計面を含む施工データの少なくとも一つに基づいて、前記作業車両の作業状態を検出する、
請求項1に記載の作業車両の制御システム。
【請求項3】
前記伝送状況検知部は、前記作業車両及び前記遠隔操作室のうち、データの送信側で記憶した送信時刻と、受信側で再生した時刻との差である遅延時間に基づいて、データの伝送状況を検知する、
請求項1に記載の作業車両の制御システム。
【請求項4】
前記表示制御部は、前記伝送状況が不良であり、前記作業継続判定部によって作業を継続すると判定された後に、前記伝送状況が良好になった場合、前記伝送状況が不良の間に行った前記作業車両の作業を通知させる、
請求項1に記載の作業車両の制御システム。
【請求項5】
前記作業継続判定部は、前記伝送状況が不良である状況が継続閾値以上継続している場合、前記作業車両の作業の継続を停止すると判定し、
前記作業機制御部は、前記作業継続判定部によって作業の継続を停止すると判定された場合、前記作業車両の作業を停止させる、
請求項4に記載の作業車両の制御システム。
【請求項6】
前記作業継続判定部は、前記作業車両の作業機にかかる荷重が変化していることが作業状態として検出された場合、作業を停止すると判定する、
請求項1に記載の作業車両の制御システム。
【請求項7】
前記作業継続判定部は、前記作業車両が不安定な姿勢での作業を行っていることが作業状態として検出された場合、作業を停止すると判定する、
請求項1に記載の作業車両の制御システム。
【請求項8】
前記作業継続判定部は、前記作業車両が危険な場所を走行していることが作業状態として検出された場合、作業を停止すると判定する、
請求項1に記載の作業車両の制御システム。
【請求項9】
請求項1から請求項8のいずれか一項に記載の作業車両の制御システムと、
作業機と、
を備える、作業車両。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業車両の制御システム及び作業車両に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
作業車両に係る技術分野において、特許文献1に開示されているような、フロント作業装置を備えた作業車両において、遠隔装置からの無線通信の通信状況を評価し、評価結果に応じて作業車両の動作を制限する際に、作業装置の動作状態に係る状態量を検出する状態量検出装置の検出結果に応じて作業車両の動作の制限を緩和する技術が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2022-145114号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、通信遅延時間が急に大きくなると、通信状況に応じて作業車両の操作信号を制限する場合に、作業車両が急停止することが避けられる。作業車両の急停止が避けられることにより、例えば、バケットに土砂を積んでいるときの急停止による土砂の飛散、または、作業姿勢が悪い時の急停止による車体の安定性の低下などが低減する。
【0005】
しかしながら、通信遅延が起きた時には作業車両の作業が停止されるので、通信が不安定な環境では作業効率が低下する。
【課題を解決するための手段】
【0006】
本開示に従えば、作業機を備えた作業車両が施工する現場を撮像する撮像装置と、前記撮像装置が撮像した画像を、前記作業車両を遠隔で操作する遠隔操作室に送信する通信装置と、前記画像を前記遠隔操作室に備えられた表示装置に表示させる表示制御部と、前記作業車両と前記遠隔操作室との間のデータの伝送状況を検知する伝送状況検知部と、前記作業車両の作業状態を検出する作業状態検出部と、前記伝送状況と、前記作業状態とに基づいて、前記作業車両の作業を継続するか否かを判定する作業継続判定部と、前記作業継続判定部によって作業を継続すると判定された場合、前記作業車両の作業を継続させるよう制御する作業機制御部と、を備える作業機械の制御システムが提供される。
【0007】
本開示に従えば、上記の作業車両の制御システムと、作業機とを備える作業車両が提供される。
【発明の効果】
【0008】
本開示によれば、伝送状況が不良な状況において、作業効率が低下することを低減することができる。
【図面の簡単な説明】
【0009】
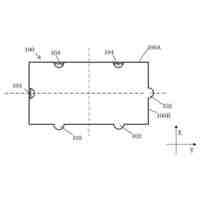
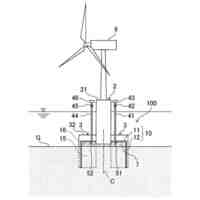
図1は、作業車両の一例を示す概略図である。
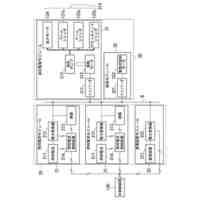
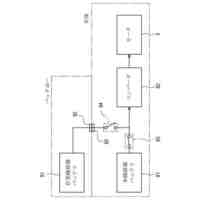
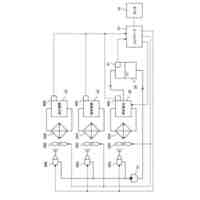
図2は、実施形態に係る作業車両の制御システムを示すブロック図である。
図3は、作業車両のコントローラを示すブロック図である。
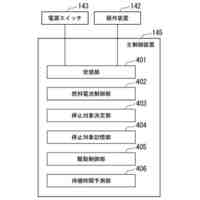
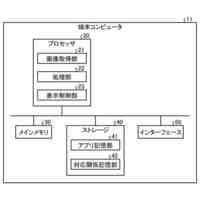
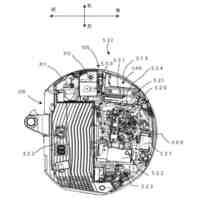
図4は、実施形態に係るコンピュータシステムを示すブロック図である。
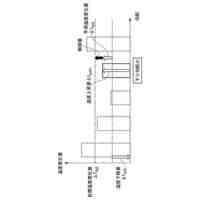
図5は、作業状態の検知の一例を説明する概略図である。
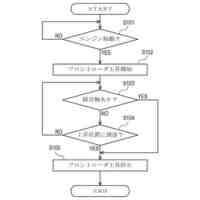
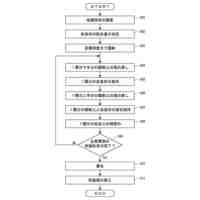
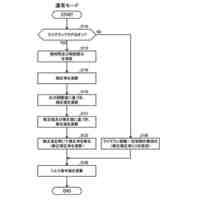
図6は、実施形態に係る作業車両の制御方法を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示はこれに限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業機械および方法
7日前
株式会社小松製作所
作業機械および方法
7日前
株式会社小松製作所
作業機械および方法
7日前
株式会社小松製作所
作業車両および作業車両の制御方法
7日前
株式会社小松製作所
作業機械の点検支援システム及び点検支援方法
7日前
株式会社小松製作所
認証情報表示システム、情報端末、及び認証情報表示方法
7日前
株式会社小松製作所
表示制御装置、情報端末、表示制御方法、及び表示制御システム
7日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
7日前
鈴健興業株式会社
敷板部材
14日前
株式会社クボタ
作業車
16日前
株式会社クボタ
作業車
16日前
個人
擁壁用ブロックおよび擁壁
15日前
株式会社ネクステリア
平板基礎
14日前
千代田工営株式会社
回転貫入杭
1日前
株式会社大林組
建物の構造
15日前
株式会社熊谷組
地盤改良方法
10日前
株式会社熊谷組
山留壁用親杭
7日前
株式会社熊谷組
密度計測方法
16日前
日本車輌製造株式会社
建設機械
3日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
作業機械
7日前
日立建機株式会社
建設機械
8日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
建設機械
8日前
日立建機株式会社
作業車両
3日前
日立建機株式会社
作業機械
8日前
日立建機株式会社
作業機械
1日前
ヤンマーホールディングス株式会社
作業機械
今日
ヤンマーホールディングス株式会社
作業機械
今日
カナデビア株式会社
サクション基礎
8日前
ライト工業株式会社
鉄筋保持用治具
8日前
鹿島建設株式会社
接続方法および接続構造
3日前
株式会社竹内製作所
作業用車両
7日前
株式会社竹内製作所
作業用車両
7日前
株式会社竹内製作所
作業用車両
7日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ