TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025155888
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2025020267
出願日
2025-02-10
発明の名称
風況観測システム、風況観測方法、およびプログラム
出願人
東京瓦斯株式会社
,
国立大学法人九州大学
,
ENEOSリニューアブル・エナジー株式会社
代理人
個人
主分類
G01P
5/02 20060101AFI20251003BHJP(測定;試験)
要約
【課題】風速等の風況を算出するために予め定められた環境条件と、風況観測のために飛行する飛行体の飛行位置の環境条件との違いとが加味された、より実態に即した風況を算出できるようにする。
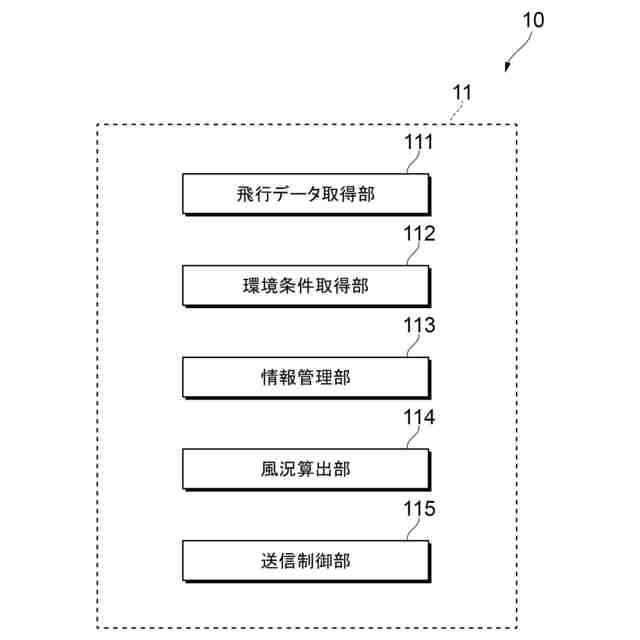
【解決手段】風況観測システムを構成する管理サーバ10の制御部11では、飛行データ取得部111が、風況の観測対象となる観測対象位置を飛行した飛行体の姿勢制御の時系列データを含む飛行データを取得し、環境条件取得部112が、観測対象位置の環境条件に関する環境条件データを取得し、風況算出部114が、取得された飛行データと、環境条件データとに基づいて、観測対象位置の風況を算出する。
【選択図】図6
特許請求の範囲
【請求項1】
風況の観測対象となる観測対象位置を飛行した飛行体の姿勢制御の時系列データを含む飛行データを取得する飛行データ取得手段と、
前記観測対象位置の環境条件に関する環境条件データを取得する環境条件取得手段と、
取得された前記飛行データと、前記環境条件データとに基づいて、前記観測対象位置の風況を算出する風況算出手段と、
を有することを特徴とする風況観測システム。
続きを表示(約 850 文字)
【請求項2】
前記環境条件取得手段は、前記環境条件データとして、前記観測対象位置の気温、大気圧、および湿度のうち少なくとも1の情報を取得し、
前記風況算出手段は、前記飛行データのうち前記姿勢制御の時系列データと、前記観測対象位置の気温、大気圧、および湿度のうち少なくとも1の情報とに基づいて、当該観測対象位置の風況としての風速と風向との少なくとも一方を算出することを特徴とする、
請求項1に記載の風況観測システム。
【請求項3】
前記風況算出手段は、取得された前記環境条件データから算出される空気密度に基づいて、前記観測対象位置の風速と風向との少なくとも一方を算出することを特徴とする、
請求項2に記載の風況観測システム。
【請求項4】
前記観測対象位置の気温、大気圧、および湿度は、予め定められた基準位置の環境条件として計測された、気温、大気圧、および湿度の基準値に基づいて推算されたものであることを特徴とする、
請求項2に記載の風況観測システム。
【請求項5】
風況の観測対象となる観測対象位置を飛行した飛行体の姿勢制御の時系列データを含む飛行データを取得するステップと、
前記観測対象位置の環境条件に関する環境条件データを取得するステップと、
取得した前記飛行データと、前記環境条件データとに基づいて、前記観測対象位置の風況を算出するステップと、
を含むことを特徴とする風況観測方法。
【請求項6】
コンピュータに、
風況の観測対象となる観測対象位置を飛行した飛行体の姿勢制御の時系列データを含む飛行データを取得する機能と、
前記観測対象位置の環境条件に関する環境条件データを取得する機能と、
取得した前記飛行データと、前記環境条件データとに基づいて、前記観測対象位置の風況を算出する機能と、
を実現させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、風況観測システム、風況観測方法、およびプログラムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
ドローンが自ら取得する飛行データに基づいて、ドローンの飛行位置の風速を算出する技術が知られている(例えば、特許文献1)。このような技術では、風速の計測の対象となる位置をドローンに飛行させ、その飛行データに含まれるドローンの姿勢制御の時系列データ等に基づいて風速が算出される。
【先行技術文献】
【特許文献】
【0003】
特許7176785号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ドローンの飛行データに基づく風速の算出は、予め定められた環境条件(例えば、高度0m、気温20℃など)を基準として行われる。このため、例えば、ドローンの飛行位置の高度が高く、気温が低い場合には、予め定められた環境条件と、ドローンの飛行位置の環境条件との間に違いが生じる。予め定められた環境条件と、ドローンの飛行位置の環境条件との間に違いがあると、算出結果としての風速と、実際の風速との間に誤差が生じることがある。特に、風速の計測の対象となる位置が、陸上風力発電を行う風車の設置予定地である場合には、高度1000mを超える高地をドローンに飛行させることがあるため、算出される風速に誤差が生じやすい。
このようなことから、風速等の風況を算出するために予め定められた環境条件と、風況観測のために飛行するドローンの飛行位置の環境条件との違いとが加味された、より実態に即した風況を算出したいとする要望がある。
【0005】
本発明の目的は、風速等の風況を算出するために予め定められた環境条件と、風況観測のために飛行する飛行体の飛行位置の環境条件との違いとが加味された、より実態に即した風況を算出できるようにすることにある。
【課題を解決するための手段】
【0006】
請求項1に記載された発明は、風況の観測対象となる観測対象位置を飛行した飛行体の姿勢制御の時系列データを含む飛行データを取得する飛行データ取得手段と、前記観測対象位置の環境条件に関する環境条件データを取得する環境条件取得手段と、取得された前記飛行データと、前記環境条件データとに基づいて、前記観測対象位置の風況を算出する風況算出手段と、を有することを特徴とする風況観測システムである。
請求項2に記載された発明は、前記環境条件取得手段は、前記環境条件データとして、前記観測対象位置の気温、大気圧、および湿度のうち少なくとも1の情報を取得し、前記風況算出手段は、前記飛行データのうち前記姿勢制御の時系列データと、前記観測対象位置の気温、大気圧、および湿度のうち少なくとも1の情報とに基づいて、当該観測対象位置の風況としての風速と風向との少なくとも一方を算出することを特徴とする、請求項1に記載の風況観測システムである。
請求項3に記載された発明は、前記風況算出手段は、取得された前記環境条件データから算出される空気密度に基づいて、前記観測対象位置の風速と風向との少なくとも一方を算出することを特徴とする、請求項2に記載の風況観測システムである。
請求項4に記載された発明は、前記観測対象位置の気温、大気圧、および湿度は、予め定められた基準位置の環境条件として計測された、気温、大気圧、および湿度の基準値に基づいて推算されたものであることを特徴とする、請求項2に記載の風況観測システムである。
請求項5に記載された発明は、風況の観測対象となる観測対象位置を飛行した飛行体の姿勢制御の時系列データを含む飛行データを取得するステップと、前記観測対象位置の環境条件に関する環境条件データを取得するステップと、取得した前記飛行データと、前記環境条件データとに基づいて、前記観測対象位置の風況を算出するステップと、を含むことを特徴とする風況観測方法である。
請求項6に記載された発明は、コンピュータに、風況の観測対象となる観測対象位置を飛行した飛行体の姿勢制御の時系列データを含む飛行データを取得する機能と、前記観測対象位置の環境条件に関する環境条件データを取得する機能と、取得した前記飛行データと、前記環境条件データとに基づいて、前記観測対象位置の風況を算出する機能と、を実現させるためのプログラムである。
【発明の効果】
【0007】
本発明によれば、風速等の風況を算出するために予め定められた環境条件と、風況観測のために飛行する飛行体の飛行位置の環境条件との違いが加味された、より実態に即した風況を算出できる。
【図面の簡単な説明】
【0008】
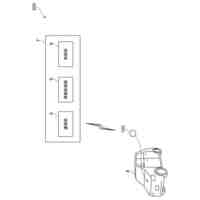
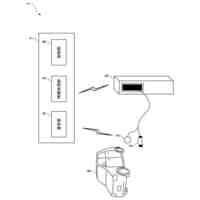
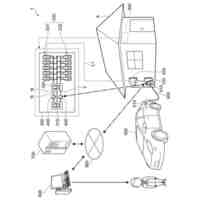
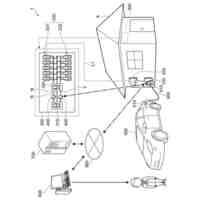
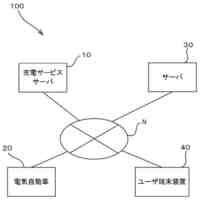
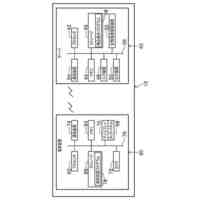
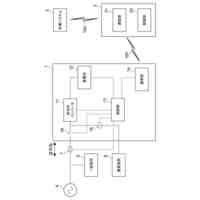
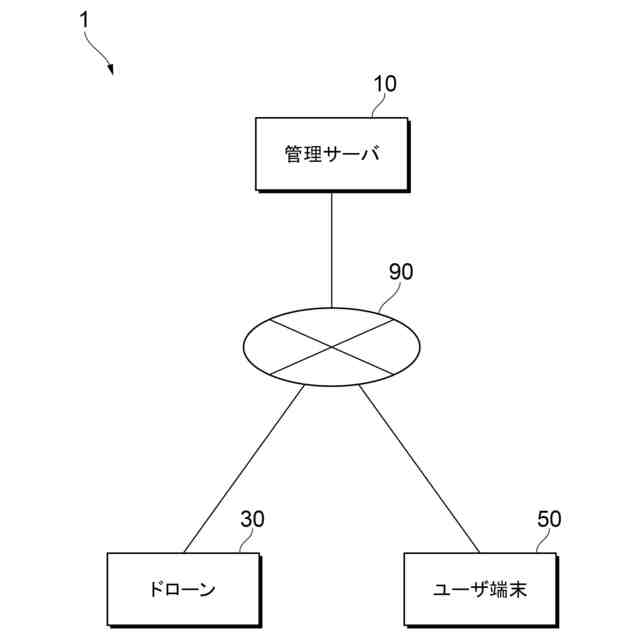
本実施の形態が適用される風況観測システムの全体構成の一例を示す図である。
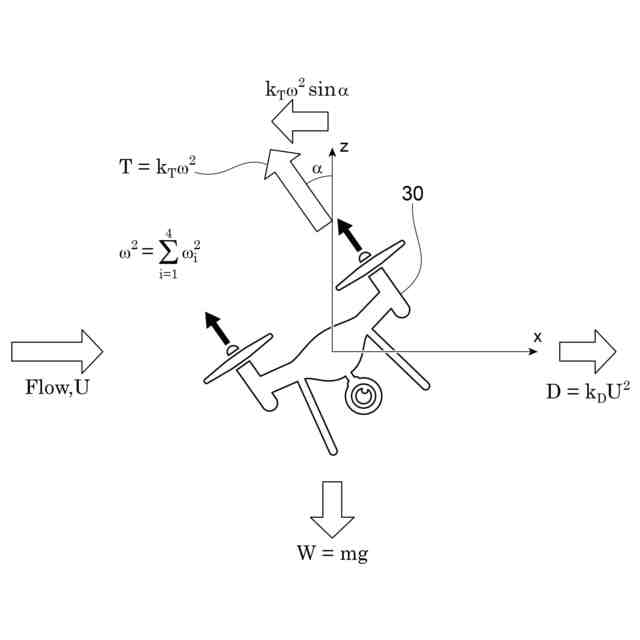
ドローンの飛行データに含まれる姿勢制御の時系列データから風速を算出する手法を説明する図である。
高度と空気密度との関係を示すグラフである。
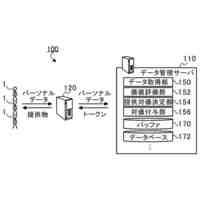
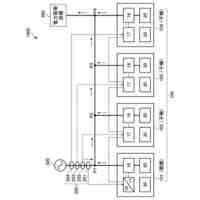
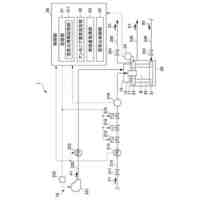
図1の風況観測システムを構成する管理サーバのハードウェア構成の一例を示す図である。
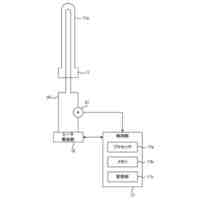
図1の風況観測システムを構成するドローンのハードウェア構成の一例を示す図である。
図4の管理サーバの制御部の機能構成の一例を示す図である。
図5のドローンの制御部の機能構成の一例を示す図である。
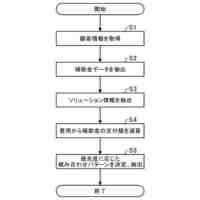
(A)は、管理サーバの処理の流れの一例を示すフローチャートである。(B)は、ドローンの処理の流れの一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して、本発明の実施の形態について詳細に説明する。
<風況観測システム1の構成>
図1は、本実施の形態が適用される風況観測システム1の全体構成の一例を示す図である。
図1に示すように、風況観測システム1は、管理サーバ10と、ドローン30と、ユーザ端末50とがネットワーク90を介して接続されることにより構成されている。
【0010】
管理サーバ10は、風況観測システム1の全体を管理するサーバとしての情報処理装置である。ドローン30は、通信機能、情報処理機能、および飛行機能を有する小型無人飛行体である。ユーザ端末50は、風況観測の結果を利用するユーザにより操作される情報処理装置である。ネットワーク90は、例えば、LAN(Local Area Network)、インターネット等である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
東京瓦斯株式会社
通信装置
11日前
東京瓦斯株式会社
給電システム
11日前
東京瓦斯株式会社
電力システム
1か月前
東京瓦斯株式会社
水電解システム
27日前
東京瓦斯株式会社
データ管理装置
18日前
東京瓦斯株式会社
電力供給システム
9日前
東京瓦斯株式会社
電動車両充電機器
17日前
東京瓦斯株式会社
充電量把握システム
17日前
三浦工業株式会社
燃焼装置
11日前
東京瓦斯株式会社
情報処理装置、及びプログラム
16日前
株式会社LIXIL
可燃性ガス回収装置
16日前
東京瓦斯株式会社
商品提示システム、及び商品提示プログラム
16日前
東京瓦斯株式会社
風況観測システム、風況観測方法、およびプログラム
5日前
東京瓦斯株式会社
炭素削減手段提案システムおよび炭素削減手段提案方法
1か月前
東京瓦斯株式会社
電気ヒータのスケール検知方法、電気ヒータのスケール検知装置、及び、電気ボイラ
1か月前
東京瓦斯株式会社
電力需給管理システム、蓄電池システムの制御方法、蓄電池システム、および外部システム
16日前
東京瓦斯株式会社
二酸化炭素還元電極用カソードガス拡散層、二酸化炭素還元電極、及び、二酸化炭素電解セル
1か月前
個人
メジャー文具
12日前
個人
高精度同時多点測定装置
4日前
個人
アクセサリー型テスター
5日前
日本精機株式会社
位置検出装置
18日前
日本精機株式会社
位置検出装置
18日前
ユニパルス株式会社
ロードセル
11日前
日本精機株式会社
位置検出装置
18日前
大和製衡株式会社
組合せ秤
23日前
大和製衡株式会社
組合せ秤
23日前
アズビル株式会社
圧力センサ
17日前
株式会社チノー
放射光測温装置
11日前
株式会社東芝
センサ
23日前
株式会社ユーシン
操作検出装置
20日前
エイブリック株式会社
磁気センサ回路
17日前
株式会社ヨコオ
ソケット
10日前
株式会社ヨコオ
ソケット
11日前
ダイキン工業株式会社
監視装置
9日前
トヨタ自動車株式会社
監視装置
10日前
トヨタ自動車株式会社
検査装置
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ