TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025160926
公報種別
公開特許公報(A)
公開日
2025-10-23
出願番号
2025127605,2024546642
出願日
2025-07-30,2022-09-15
発明の名称
移動体支援装置および移動体システム
出願人
本田技研工業株式会社
代理人
デロイトトーマツ弁理士法人
主分類
G01C
21/26 20060101AFI20251016BHJP(測定;試験)
要約
【課題】目的場所を基準とした空間指定が曖昧な指示に潜在している指示者の意図に鑑みて、当該指示にしたがって移動体が指定状態を実現するために適当なエリアを目的場所の周辺で探索しうる移動体を提供する。
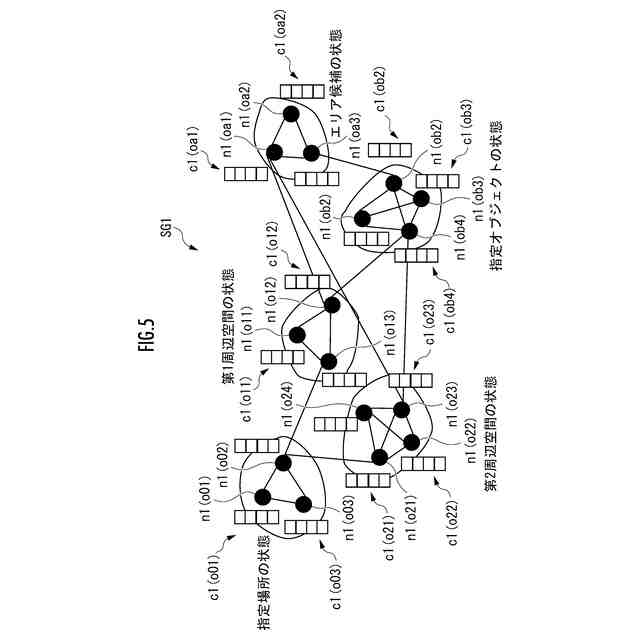
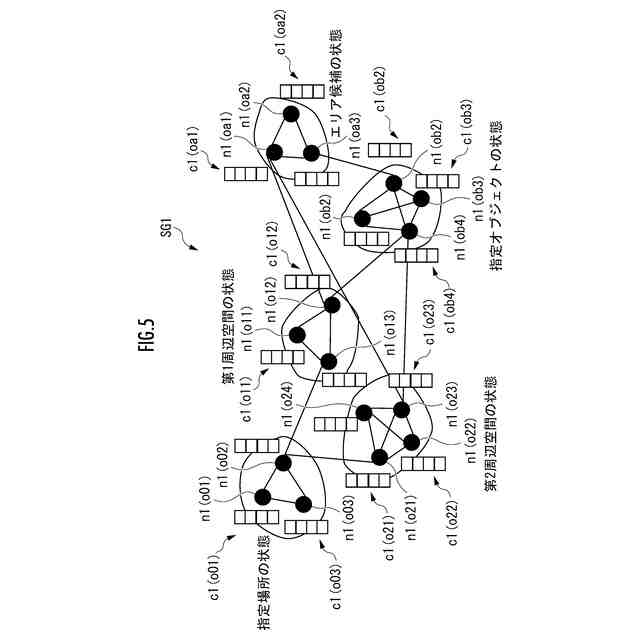
【解決手段】ユーザの指示、ならびに、移動体20の位置および指定場所を臨む方向に応じた環境画像に基づいて作成されたシーングラフSG1~SG3が入力データとして用いられてモデルが構築される。状態シーングラフSG1を構成する1次ノードの特徴量が、移動体20の位置を基準とした各オブジェクトとの相対配置関係(距離および角度)に応じて定義されている。状態シーングラフSG1を構成する1次ノードの特徴量が、各オブジェクトの空間占有態様に応じて定義されている。
【選択図】図5
特許請求の範囲
【請求項1】
指定場所の周辺の指定空間における指定状態の実現に関する移動体への指示と、
前記移動体の位置情報と、
前記移動体と前記指定場所との位置関係に基づき取得された前記指定場所の周辺の画像に基づき作成された複数のシーングラフと、を学習済みモデルに入力することにより、前記指定場所を基準とした複数の周辺空間に存在する複数のエリア候補のうち一つのエリア候補を出力する
移動体支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体支援装置と、当該移動体支援装置および移動機能を有する移動体により構成されている移動体システムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
画像からシーングラフを生成する手法が提案されている(例えば、非特許文献1および2参照)。当該手法によれば、画像を入力するステップと、ディープラーニングに基づくオブジェクト検出方法を用いて画像からオブジェクトを検出するステップと、PLSIを利用して、画像内のコンテキスト状況を検出するステップと、ディープラーニングに基づく関係検出およびオントロジ方法を用いて、オブジェクト同士の関係を検出するステップと、入力画像に対するシーングラフを生成するステップと、が実行される。
【先行技術文献】
【非特許文献】
【0003】
Learning 3D Semantic Scene Graphs from 3D Indoor Reconstructions, CVPR2020(https://arxiv.org/pdf/2004.03967v1.pdf)
Multi-Layer Semantic and Geometric Modeling with Neural Message Passing in 3D Scene Graphs for Hierarchical Mechanical Search, ICRA2020(https://arxiv.org/pdf/2012.04060.pdf)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来技術によれば、ユーザがロボットなどの移動体に対して「〇〇(例えば、店舗または施設などの名称)の右に停めて」と指示しても、ユーザが意図する「〇〇の右」に該当するエリアに当該移動体を停止させることが困難であった。これは、移動体を停止させるためには一点の座標が必要であるものの、ユーザの指示に含まれる「右」という表現によって点が一義的に表現されていないためである。そもそも、ユーザは「右」という表現を一義的に定まる点の座標として意識しておらず、右という「空間」を指している場合が多い。このため、ユーザの指示に含まれている単語と空間とを紐づける必要ある。また、「右」という空間には、移動体が停止可能な空間およびそうではない空間がある。例えば、「〇〇の右」が空地だったら停まれるし、横断歩道であれば停止できない。
【0005】
そこで、本発明は、目的場所を基準とした空間指定が曖昧な指示に潜在している指示者の意図に鑑みて、当該指示にしたがって移動体が指定状態を実現するために適当なエリアを目的場所の周辺で探索しうる移動体システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の移動体支援装置は、
指定場所の周辺の指定空間における指定状態の実現に関する移動体への指示と、
前記移動体の位置情報と、
前記移動体と前記指定場所との位置関係に基づき取得された前記指定場所の周辺の画像に基づき作成された複数のシーングラフと、を学習済みモデルに入力することにより、前記指定場所を基準とした複数の周辺空間に存在する複数のエリア候補のうち一つのエリア候補を出力する。
【図面の簡単な説明】
【0007】
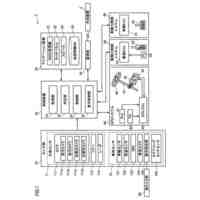
学習装置および移動体支援装置の構成に関する説明図。
学習済みモデルの生成機能に関する説明図。
複数のオブジェクトが含まれている画像に関する説明図。
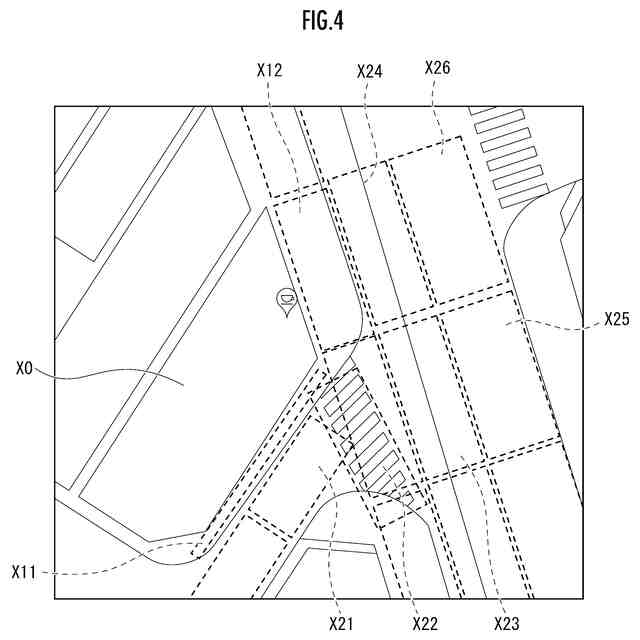
3次元高精細マップが2次元マップに投影された結果に関する説明図。
状態シーングラフの例示説明図。
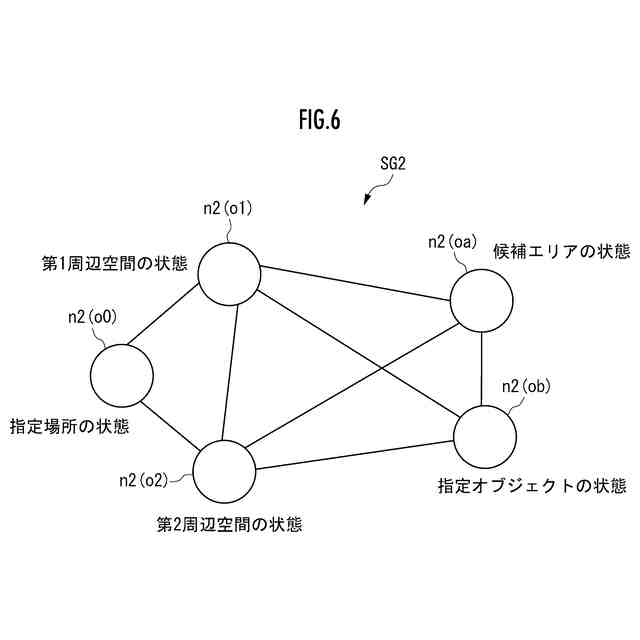
レイアウトシーングラフの例示説明図。
指示シーングラフの例示説明図。
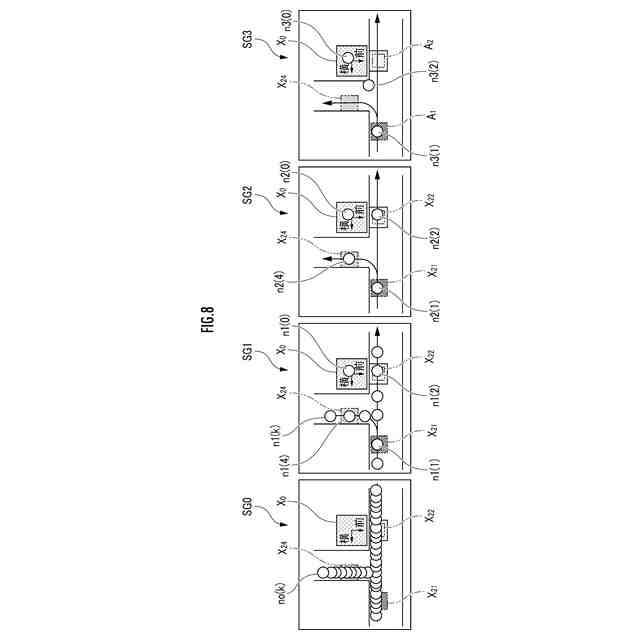
シーングラフの逐次的な畳み込みおよびプーリングの概念的な説明図。
グラフニューラルネットワークに関する説明図。
グラフニューラルネットワークに入力されるシーングラフの逐次的な畳み込みおよびプーリングの概念的な説明図。
異なる走行シーンにおける正解データに関する説明図。
障害物の存在態様が異なる走行シーンにおける正解データに関する説明図 。
移動体支援システムのエリア候補出力機能に関する説明図。
【発明を実施するための形態】
【0008】
(構成)
図1に示されている本発明の一実施形態としての学習装置100および移動体支援装置200のそれぞれは、移動体20の指定状態の実現を支援するためにデータベース102にネットワークを介してアクセス可能なデバイスに構成されている。移動体20および移動体支援装置200が「移動体システム」を構成する。
【0009】
データベース102は、移動体20の周辺の様子を表わす環境画像(本発明の「画像」に相当する。)、3次元高精細地図(地図情報)、グラフニューラルネットグラフおよび学習済みモデルなどを記憶保持する。本実施形態では、データベース102が、学習装置100および移動体支援装置200とは別個のデバイスまたはデータベースサーバにより構成されているが、学習装置100および/または移動体支援装置200の構成要素であってもよい。
【0010】
学習装置100は、第1シーングラフ作成要素110および学習済みモデル生成要素120を備えている。第1シーングラフ作成要素110および学習済みモデル生成要素120のそれぞれは、CPUおよび/またはプロセッサコアなどの演算処理要素、ROMおよび/またはRAMなどの記憶要素、ならびに、入力・出力インターフェース回路等により構成されている。第1シーングラフ作成要素110および学習済みモデル生成要素120のそれぞれは、後述するシーングラフ作成および学習済みモデル生成のそれぞれなどの指定タスクを実行するように構成されている。機能要素が指定タスクを実行するように構成されている、とは、当該機能要素を構成するハードウェアが、ソフトウェアおよび必要に応じてデータを記憶要素から読み取り、当該ソフトウェアにしたがって当該データまたはその他のデータを対象として演算処理を実行することにより当該指定タスクを実行することを意味する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
本田技研工業株式会社
車両
15日前
本田技研工業株式会社
車両
8日前
本田技研工業株式会社
車両
16日前
本田技研工業株式会社
車両
16日前
本田技研工業株式会社
車両
15日前
本田技研工業株式会社
移動体
17日前
本田技研工業株式会社
飛行体
16日前
本田技研工業株式会社
エンジン
16日前
本田技研工業株式会社
固体電池
11日前
本田技研工業株式会社
排気装置
15日前
本田技研工業株式会社
清掃装置
16日前
本田技研工業株式会社
触媒装置
11日前
本田技研工業株式会社
二次電池
11日前
本田技研工業株式会社
電気機器
16日前
本田技研工業株式会社
電気機器
16日前
本田技研工業株式会社
固体電池
15日前
本田技研工業株式会社
内燃機関
15日前
本田技研工業株式会社
発電セル
15日前
本田技研工業株式会社
電気部品
16日前
本田技研工業株式会社
除草装置
15日前
本田技研工業株式会社
制御装置
15日前
本田技研工業株式会社
収容装置
16日前
本田技研工業株式会社
内燃機関
16日前
本田技研工業株式会社
切断装置
22日前
本田技研工業株式会社
排気装置
15日前
本田技研工業株式会社
排気装置
15日前
本田技研工業株式会社
固体電池
17日前
本田技研工業株式会社
電気機器
17日前
本田技研工業株式会社
電気機器
17日前
本田技研工業株式会社
全固体電池
17日前
本田技研工業株式会社
樹脂成型品
16日前
本田技研工業株式会社
電極積層体
15日前
本田技研工業株式会社
鞍乗型車両
15日前
本田技研工業株式会社
鞍乗型車両
15日前
本田技研工業株式会社
全固体電池
11日前
本田技研工業株式会社
鞍乗型車両
15日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ