TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025065882
公報種別
公開特許公報(A)
公開日
2025-04-22
出願番号
2023175390
出願日
2023-10-10
発明の名称
作業ロボット
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
A01D
34/64 20060101AFI20250415BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業ロボットの使い勝手を向上させることが可能な技術を提供する。
【解決手段】本明細書が開示する作業ロボットは、ロボット本体と、ロボット本体を移動させる移動部と、ロボット本体に支持される作業部と、ロボット本体に対する作業部の高さを変化させる高さ調整部と、制御部と、を備える。制御部は、移動部によってロボット本体を移動させながら作業部による作業を行なう作業処理と、高さ調整部によってロボット本体に対する作業部の高さを複数段階に分けて調整する高さ調整処理と、を含む自律運転を実行可能に構成される。作業ロボットは、自律運転において制御部が高さ調整処理を実行する第1状態と、自律運転において制御部が高さ調整処理を実行しない第2状態と、の間で切り替え可能である。
【選択図】図7
特許請求の範囲
【請求項1】
作業ロボットであって、
ロボット本体と、
前記ロボット本体を移動させる移動部と、
前記ロボット本体に支持される作業部と、
前記ロボット本体に対する前記作業部の高さを変化させる高さ調整部と、
制御部と、を備えており、
前記制御部は、
前記移動部によって前記ロボット本体を移動させながら前記作業部による作業を行なう作業処理と、
前記高さ調整部によって前記ロボット本体に対する前記作業部の高さを複数段階に分けて調整する高さ調整処理と、を含む自律運転を実行可能に構成されており、
前記作業ロボットは、前記自律運転において前記制御部が前記高さ調整処理を実行する第1状態と、前記自律運転において前記制御部が前記高さ調整処理を実行しない第2状態と、の間で切り替え可能である、作業ロボット。
続きを表示(約 1,400 文字)
【請求項2】
ユーザからの入力を受け入れる入力部をさらに備えており、
前記制御部は、前記入力部に入力された入力値に基づいて、前記高さ調整処理を実行する、請求項1の作業ロボット。
【請求項3】
作業ロボットであって、
ロボット本体と、
前記ロボット本体を移動させる移動部と、
前記ロボット本体に支持される作業部と、
前記ロボット本体に対する前記作業部の高さを変化させる高さ調整部と、
ユーザからの入力を受け入れる入力部と、
制御部と、を備えており、
前記制御部は、
前記移動部によって前記ロボット本体を移動させながら前記作業部による作業を行なう作業処理と、
前記高さ調整部によって前記ロボット本体に対する前記作業部の高さを複数段階に分けて調整する高さ調整処理と、を含む自律運転を実行可能に構成されており、
前記制御部は、前記入力部に入力された入力値に基づいて、前記高さ調整処理を実行する、作業ロボット。
【請求項4】
前記高さ調整処理は、
前記ロボット本体に対する前記作業部の高さを初期高さとする第1高さ調整処理と、
前記ロボット本体に対する前記作業部の高さを前記初期高さから目標高さまで変化させる第2高さ調整処理と、を含み、
前記入力値は、前記初期高さおよび前記目標高さのうち少なくとも一方を含む、請求項2または3の作業ロボット。
【請求項5】
前記制御部は、前記ロボット本体に対する前記作業部の高さを前記初期高さから前記目標高さまで複数段階に分けて変化させるように、前記第2高さ調整処理を複数段階に分けて実行し、
前記制御部は、前記第2高さ調整処理の各段階の終了後、所定条件が成立するまで前記作業処理を実行してから、前記第2高さ調整処理の次の段階を開始する、請求項4の作業ロボット。
【請求項6】
前記制御部は、前記第2高さ調整処理の各段階において、前記ロボット本体に対する前記作業部の高さを所定量ずつ変化させる、請求項5の作業ロボット。
【請求項7】
前記制御部は、作業場面積を取得可能に構成されており、
前記所定条件は、前記作業場面積に基づく条件を含む、請求項5または6の作業ロボット。
【請求項8】
前記所定条件は、前記第2高さ調整処理の各段階の終了後に前記作業部による作業が行われた時間が、前記作業場面積に基づいて決定される作業時間閾値を上回ることを含む、請求項7の作業ロボット。
【請求項9】
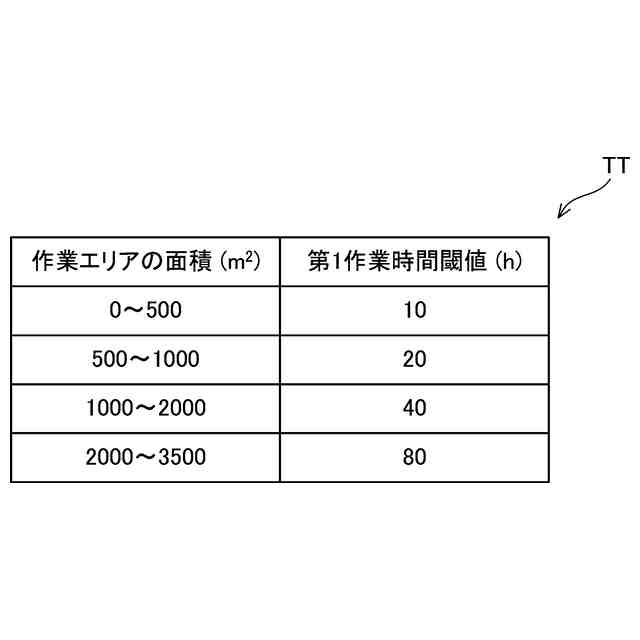
前記制御部は、複数の面積範囲のそれぞれに対して一つの時間閾値が割り当てられた閾値テーブルを記憶しており、
前記制御部は、前記作業場面積が取得される場合、前記閾値テーブルを参照して、前記作業場面積が属する面積範囲に割り当てられた前記時間閾値を前記作業時間閾値として決定する、請求項8の作業ロボット。
【請求項10】
前記作業部は、芝生を刈り込むための刈刃を備えており、
前記目標高さは、前記初期高さよりも低い高さであり、
前記制御部は、前記第2高さ調整処理において、前記ロボット本体に対する前記作業部の高さを前記初期高さから前記目標高さまで下降させる、請求項4から9の何れか一項の作業ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、作業ロボットに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
特許文献1には、ロボット本体と、前記ロボット本体を移動させる移動部と、前記ロボット本体に支持される作業部と、前記ロボット本体に対する前記作業部の高さを変化させる高さ調整部と、制御部と、を備える作業ロボットが開示される。前記制御部は、前記移動部によって前記ロボット本体を移動させながら前記作業部による作業を行なう作業処理を含む自律運転を実行可能に構成されている。ユーザが手動で前記高さ調整部を動作させることにより、前記ロボット本体に対する前記作業部の高さを調整することができる。
【先行技術文献】
【特許文献】
【0003】
再公表特許第2017/051663号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の作業ロボットは、自律運転を実行している間、作業ロボットに対するユーザの手動操作がなければ、作業部の高さを調整することができない。このため、作業部の高さを調整するために、作業ロボットによる作業の進捗状況をユーザが監視する必要がある等の不便が生じ得る。その結果、作業ロボットの使い勝手が悪くなるおそれがある。本明細書では、作業ロボットの使い勝手を向上させることが可能な技術を提供する。
【課題を解決するための手段】
【0005】
本明細書が開示する作業ロボットは、ロボット本体と、前記ロボット本体を移動させる移動部と、前記ロボット本体に支持される作業部と、前記ロボット本体に対する前記作業部の高さを変化させる高さ調整部と、制御部と、を備える。前記制御部は、前記移動部によって前記ロボット本体を移動させながら前記作業部による作業を行なう作業処理と、前記高さ調整部によって前記ロボット本体に対する前記作業部の高さを複数段階に分けて調整する高さ調整処理と、を含む自律運転を実行可能に構成される。前記作業ロボットは、前記自律運転において前記制御部が前記高さ調整処理を実行する第1状態と、前記自律運転において前記制御部が前記高さ調整処理を実行しない第2状態と、の間で切り替え可能である。
【0006】
上記の構成によれば、作業ロボットは、自律運転を実行している間、高さ調整処理を実行することにより、ユーザの手動操作を要することなく作業部の高さを調整することができる。これにより、作業ロボットによる作業の進捗状況をユーザが監視する必要がなくなるので、作業ロボットの使い勝手を向上することができる。ただし、場合によっては、高さ調整処理を実行しないことが望ましいこともある。例えば、自律運転を通じて作業部の高さを一定に保つことをユーザが望む場合である。さらに上記の構成によれば、作業ロボットの状態を、自律運転の実行中に高さ調整処理が実行される第1状態と、自律運転の実行中に高さ調整処理が実行されない第2状態と、の間で切り替えることができる。これにより、自律運転の実行中に高さ調整処理を実行するか否かをユーザが選択できるようになるので、作業ロボットの使い勝手をさらに向上することができる。
【0007】
本明細書が開示する別の作業ロボットは、ロボット本体と、前記ロボット本体を移動させる移動部と、前記ロボット本体に支持される作業部と、前記ロボット本体に対する前記作業部の高さを変化させる高さ調整部と、ユーザからの入力を受け入れる入力部と、制御部と、を備える。前記制御部は、前記移動部によって前記ロボット本体を移動させながら前記作業部による作業を行なう作業処理と、前記高さ調整部によって前記ロボット本体に対する前記作業部の高さを複数段階に分けて調整する高さ調整処理と、を含む自律運転を実行可能に構成される。前記制御部は、前記入力部に入力された入力値に基づいて、前記高さ調整処理を実行する。
【0008】
上記の構成によれば、作業ロボットは、自律運転を実行している間、高さ調整処理を実行することにより、ユーザの手動操作を要することなく作業部の高さを調整することができる。これにより、作業ロボットによる作業の進捗状況をユーザが監視する必要がなくなるので、作業ロボットの使い勝手を向上することができる。さらに上記の構成によれば、ユーザが入力部に入力した入力値に基づいて高さ調整処理が実行される。これにより、高さ調整処理を、ユーザが作業ロボットを使用する環境や作業ロボットに行わせたい作業内容に合わせたものにできるので、作業ロボットの使い勝手をさらに向上することができる。
【図面の簡単な説明】
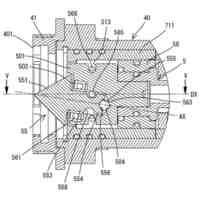
【0009】
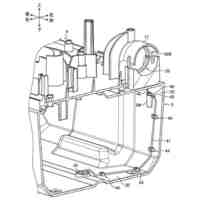
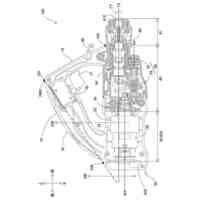
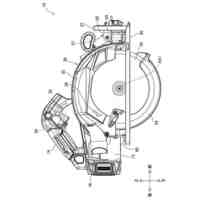
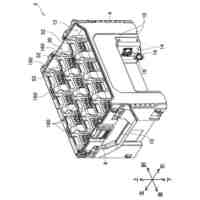
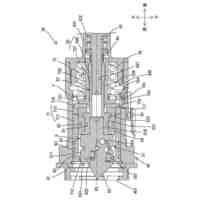
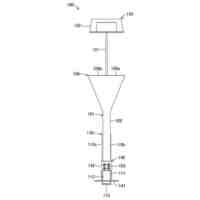
実施例1に係るロボット芝刈機2の使用例を示す図である。
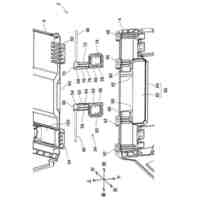
実施例1に係るロボット芝刈機2の左側面図である。
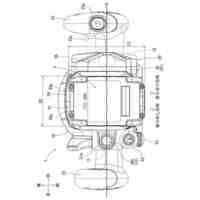
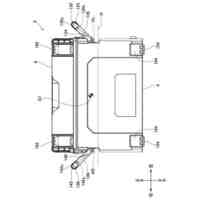
実施例1に係るロボット芝刈機2の背面図である。
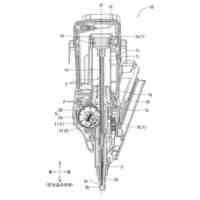
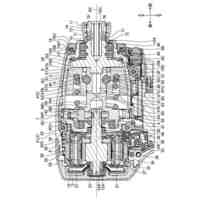
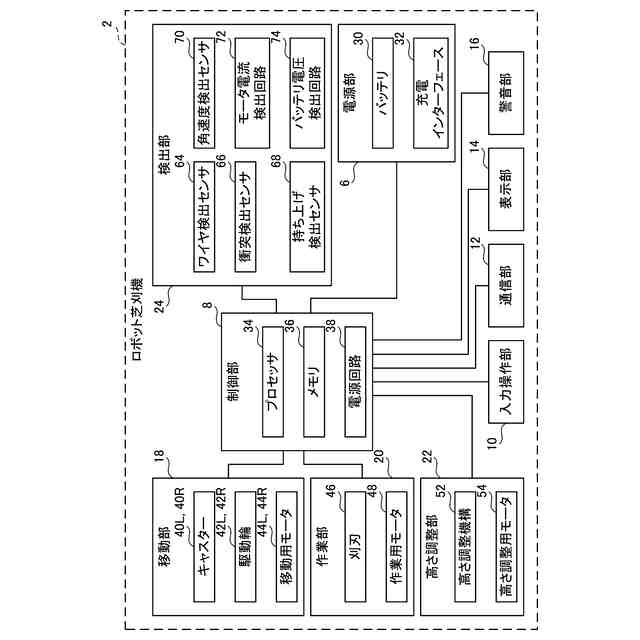
実施例1に係るロボット芝刈機2の概略構成図である。
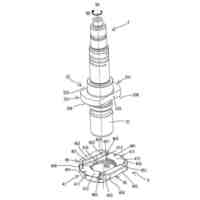
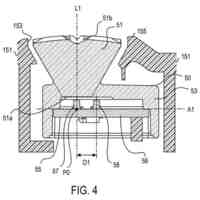
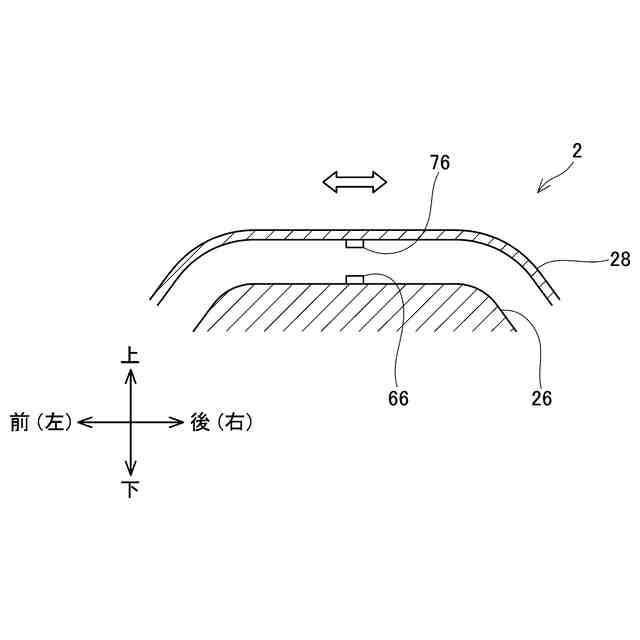
実施例1に係るロボット芝刈機2の衝突検出センサ66の近傍の構成を概略的に示す図である。
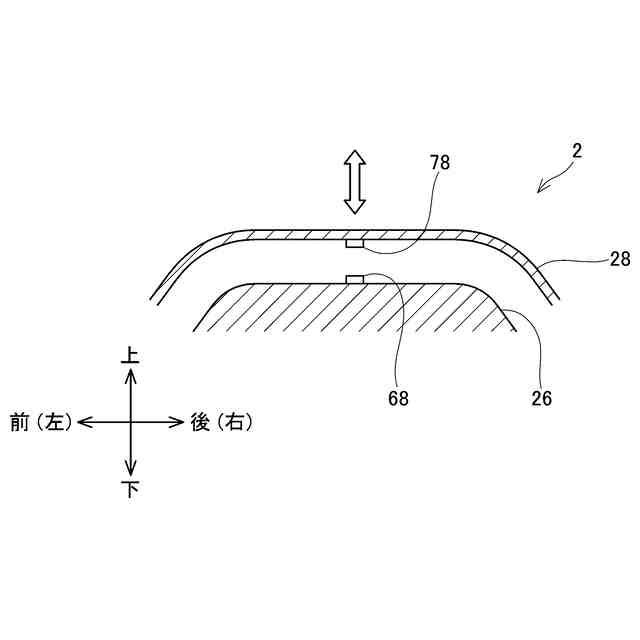
実施例1に係るロボット芝刈機2の持ち上げ検出センサ68の近傍の構成を概略的に示す図である。
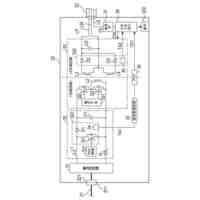
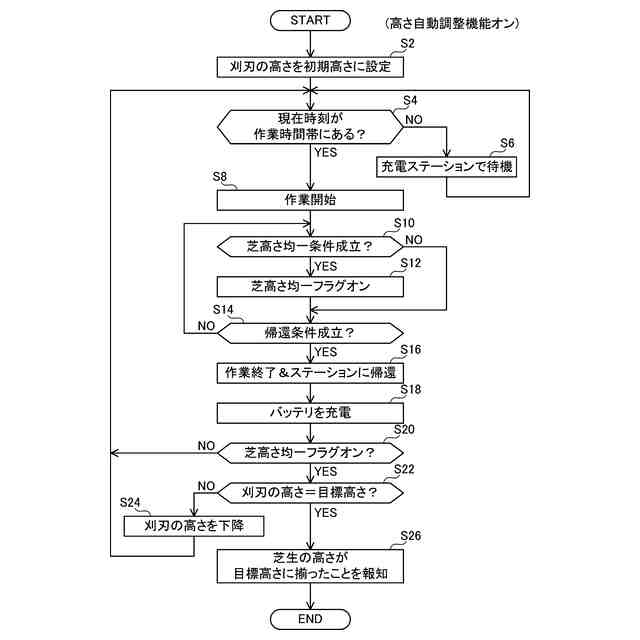
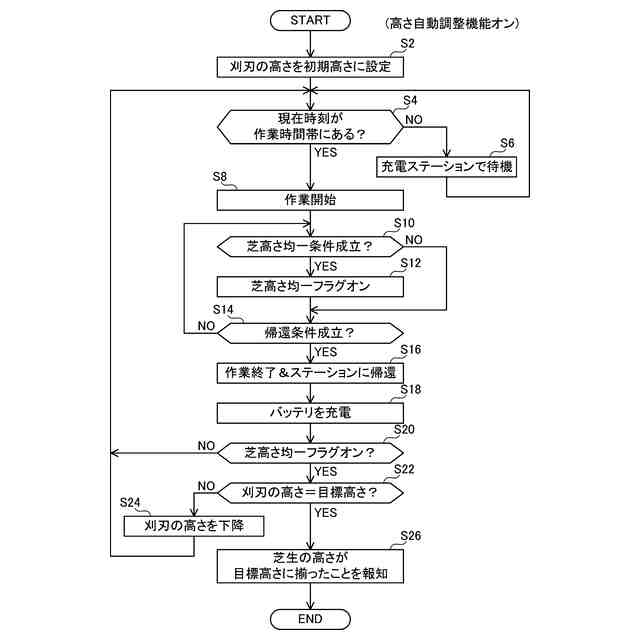
実施例1に係るロボット芝刈機2の制御部8が実行する、高さ自動調整機能がオンとなっている場合の自律運転のフローチャートである。
実施例1に係るロボット芝刈機2の制御部8のメモリ36に記憶される閾値テーブルTTを模式的に示す図である。
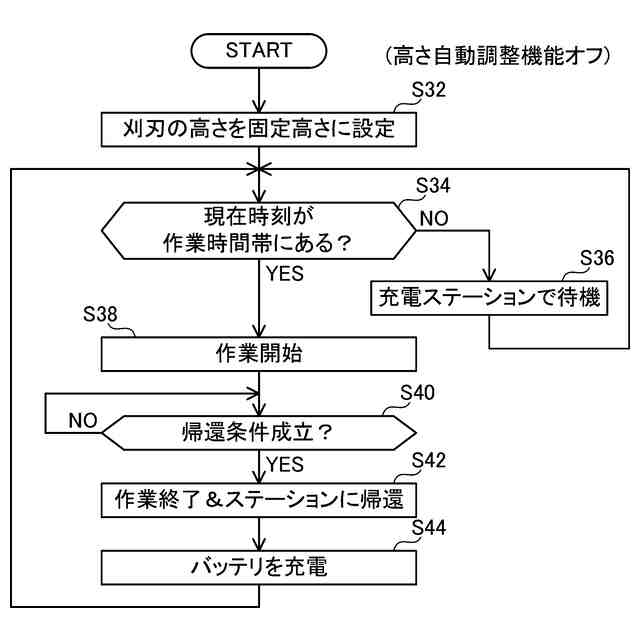
実施例1に係るロボット芝刈機2の制御部8が実行する、高さ自動調整機能がオフとなっている場合の自律運転のフローチャートである。
実施例1に係るロボット芝刈機2が自律運転を行っている間に制御部8が実行する処理のフローチャートである。
実施例2に係るロボット芝刈機202が自律運転を行っている間に制御部8が実行する処理のフローチャートである。
実施例3に係るロボット芝刈機302が自律運転を行っている間に制御部8が実行する処理のフローチャートである。
実施例4に係るロボット芝刈機402の制御部8が実行する、高さ自動調整機能がオンとなっている場合の自律運転のフローチャートである。
【発明を実施するための形態】
【0010】
本発明の代表的かつ非限定的な具体例について、図面を参照して以下に詳細に説明する。この詳細な説明は、本発明の好ましい例を実施するための詳細を当業者に示すことを単純に意図しており、本発明の範囲を限定することを意図したものではない。また、開示された追加的な特徴ならびに発明は、さらに改善された作業ロボットを提供するために、他の特徴や発明とは別に、又は共に用いることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
集じん機
10日前
株式会社マキタ
回転工具
24日前
株式会社マキタ
電動工具
21日前
株式会社マキタ
電気機器
1日前
株式会社マキタ
打撃工具
1日前
株式会社マキタ
マルノコ
15日前
株式会社マキタ
電気機器
1日前
株式会社マキタ
電動作業機
1日前
株式会社マキタ
背負式ブロワ
今日
株式会社マキタ
打ち込み工具
17日前
株式会社マキタ
打ち込み工具
17日前
株式会社マキタ
打ち込み工具
17日前
株式会社マキタ
ベルトサンダ
16日前
株式会社マキタ
携帯用切断機
8日前
株式会社マキタ
打ち込み工具
1か月前
株式会社マキタ
フレア形成工具
1日前
株式会社マキタ
携帯用バンドソー
1日前
株式会社マキタ
作業機及び表示器
24日前
株式会社マキタ
木工用携帯用切削機
23日前
株式会社マキタ
電気機器およびケース
1日前
株式会社マキタ
電気機器および運搬ケース
1日前
株式会社マキタ
電気機器および運搬ケース
1日前
株式会社マキタ
インパクト工具及びスピンドル
23日前
株式会社マキタ
フレア形成装置及びフレア形成工具
1日前
株式会社マキタ
フレア形成装置及びフレア形成工具
1日前
株式会社マキタ
充電システム、電源アダプタ、及び充電器
1日前
株式会社マキタ
鉄筋結束ロボット
14日前
個人
播種機
14日前
個人
釣り用ルアー
1日前
個人
釣り用ルアー
1日前
井関農機株式会社
作業車両
2日前
個人
室内栽培システム
10日前
井関農機株式会社
コンバイン
7日前
株式会社シマノ
釣り具
7日前
有限会社マイク
囲い罠
7日前
井関農機株式会社
圃場作業機
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ