TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025073129
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2023183611
出願日
2023-10-26
発明の名称
不確実性学習装置、不確実性学習プログラム、および、不確実性学習システム
出願人
三菱電機株式会社
,
国立研究開発法人産業技術総合研究所
代理人
弁理士法人山王内外特許事務所
主分類
G06N
3/08 20230101AFI20250502BHJP(計算;計数)
要約
【課題】従来の、学習データ全てに対してノイズを付与して機械学習モデルを学習する手法で作成された機械学習モデルと比較して、より精度よく不確実性の推論が可能な機械学習モデルを提供する。
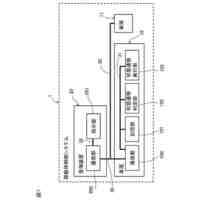
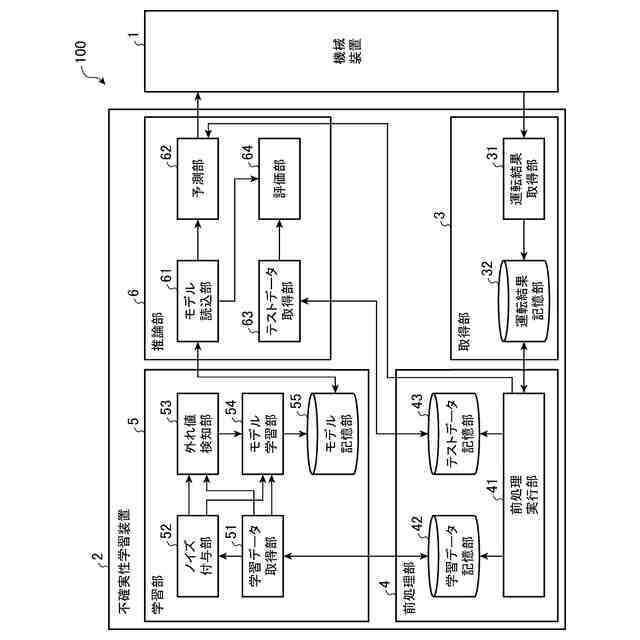
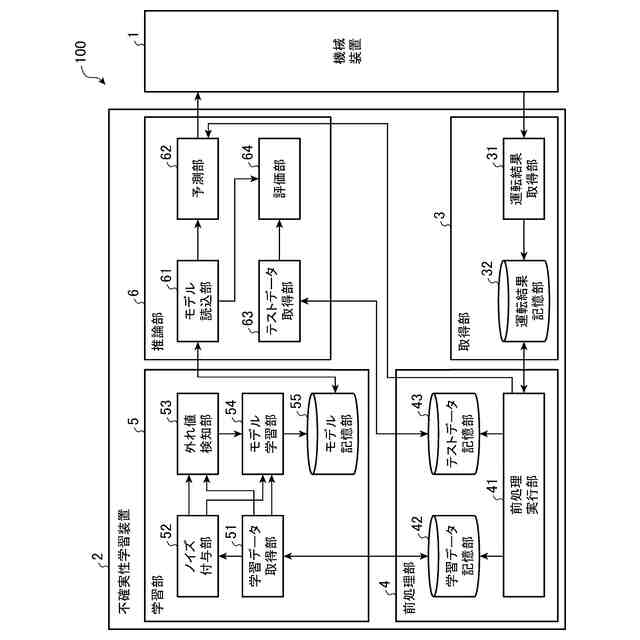
【解決手段】機械装置(1)から得られた運転関連データに基づいて作成された学習データを取得する学習データ取得部(51)と、学習データ取得部(51)が取得した学習データに対してノイズを付与したノイズ付与後学習データを作成するノイズ付与部(52)と、学習データ取得部(51)が取得した学習データとノイズ付与部(52)が作成したノイズ付与後学習データから外れ値スコアを算出する外れ値検知部(53)と、学習データとノイズ付与後学習データとに基づき、外れ値検知部(53)が算出した外れ値スコアに基づく重み付けがされた損失関数を計算し、機械学習モデルを学習するモデル学習部(54)とを備えた。
【選択図】図3
特許請求の範囲
【請求項1】
機械装置の運転結果に関する運転関連データに基づくデータを入力とし、前記運転関連データに対応する予測値と当該予測値の不確実性を出力する機械学習モデルを作成する不確実性学習装置であって、
前記機械装置から得られた前記運転関連データに基づいて作成された学習データを取得する学習データ取得部と、
前記学習データ取得部が取得した前記学習データに対してノイズを付与したノイズ付与後学習データを作成するノイズ付与部と、
前記学習データ取得部が取得した前記学習データと前記ノイズ付与部が作成した前記ノイズ付与後学習データから外れ値スコアを算出する外れ値検知部と、
前記学習データと前記ノイズ付与後学習データとに基づき、前記外れ値検知部が算出した前記外れ値スコアに基づく重み付けがされた損失関数を計算し、前記機械学習モデルを学習するモデル学習部
とを備えた不確実性学習装置。
続きを表示(約 2,100 文字)
【請求項2】
前記機械装置から得られた前記運転関連データに基づいて作成されたテストデータを取得するテストデータ取得部と、
前記テストデータ取得部が取得した前記テストデータと前記モデル学習部が作成した前記機械学習モデルとに基づき前記予測値と前記不確実性を推論して前記機械学習モデルを評価する評価部
を備えた請求項1記載の不確実性学習装置。
【請求項3】
前記運転関連データに基づいて前記学習データを作成する前処理実行部を備え、
前記学習データ取得部は、前記前処理実行部が作成した前記学習データを取得する
ことを特徴とする請求項1記載の不確実性学習装置。
【請求項4】
前記運転関連データに基づいて前記学習データおよび前記テストデータを作成する前処理実行部を備え、
前記学習データ取得部は、前記前処理実行部が作成した前記学習データを取得し、
前記テストデータ取得部は、前記前処理実行部が作成した前記テストデータを取得する
ことを特徴とする請求項2記載の不確実性学習装置。
【請求項5】
前記不確実性は、データのバラつきを示す分散または標準偏差であらわされる
ことを特徴とする請求項1から請求項4のうちのいずれか1項記載の不確実性学習装置。
【請求項6】
前記機械装置をシミュレーション運転して得られたシミュレーションデータ、または、前記機械装置の過去の前記運転結果に関する前記運転関連データ、に基づく事前データを取得する事前データ取得部と、
前記事前データ取得部が取得した前記事前データに基づいて作成された事前学習データに基づいて事前学習モデルを学習する事前学習部を備え、
前記モデル学習部は、前記学習データと前記ノイズ付与後学習データとに基づき、前記外れ値検知部が算出した前記外れ値スコアに基づく重み付けがされた損失関数を計算し、前記事前学習部が学習した前記事前学習モデルを転移学習することで前記機械学習モデルを作成する
ことを特徴とする請求項1記載の不確実性学習装置。
【請求項7】
前記機械装置とは独立して設けられた外部センサで取得されたセンサデータを取得するセンサデータ取得部を備え、
前記学習データ取得部は、前記機械装置から得られた前記運転関連データと前記センサデータ取得部が取得した前記センサデータとに基づいて作成された前記学習データを取得する
ことを特徴とする請求項1記載の不確実性学習装置。
【請求項8】
前記機械装置をシミュレーション運転して得られた前記運転結果に関するシミュレーションデータ、または、前記機械装置の過去の前記運転結果に関する前記運転関連データに基づく事前データを取得する事前データ取得部と、
前記事前データ取得部が取得した前記事前データに基づいて作成された事前学習データに基づいて事前学習モデルを学習する事前学習部と、
前記機械装置とは独立して設けられた外部センサで取得されたセンサデータを取得するセンサデータ取得部を備え、
前記学習データ取得部は、前記機械装置から得られた前記運転関連データと前記センサデータ取得部が取得した前記センサデータとに基づいて作成された前記学習データを取得し、
前記モデル学習部は、前記学習データと前記ノイズ付与後学習データとに基づき、前記外れ値検知部が算出した前記外れ値スコアに基づく重み付けがされた損失関数を計算し、前記事前学習部が学習した前記事前学習モデルを転移学習することで前記機械学習モデルを作成する
ことを特徴とする請求項1記載の不確実性学習装置。
【請求項9】
前記機械装置はFA機器であり、前記運転関連データは、指令位置、指令速度、指令加速度、フィードバック速度、フィードバック加速度、電流値、または、加工位置のズレを計測した値を含む
ことを特徴とする請求項1記載の不確実性学習装置。
【請求項10】
機械装置の運転結果に関する運転関連データに基づくデータを入力とし、前記運転関連データに対応する予測値と当該予測値の不確実性を出力する機械学習モデルを作成する不確実性学習プログラムであって、
コンピュータを、
前記機械装置から得られた前記運転関連データに基づいて作成された学習データを取得する学習データ取得部と、
前記学習データ取得部が取得した前記学習データに対してノイズを付与したノイズ付与後学習データを作成するノイズ付与部と、
前記学習データ取得部が取得した前記学習データと前記ノイズ付与部が作成した前記ノイズ付与後学習データから外れ値スコアを算出する外れ値検知部と、
前記学習データと前記ノイズ付与後学習データとに基づき、前記外れ値検知部が算出した前記外れ値スコアに基づく重み付けがされた損失関数を計算し、前記機械学習モデルを学習するモデル学習部
として機能させるための不確実性学習プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、入力されたデータに対する予測値および不確実性を出力する学習済みのモデル(以下「機械学習モデル」という。)を作成する不確実性学習装置、不確実性学習プログラム、および、不確実性学習システムに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
近年、種々のシーンで、機械学習モデルを用いて種々のタスクを解決する技術が知られている。
例えば、自動運転もしくは医療現場のように命にかかわる場面で用いられる機器、または、FA(Factory Automation)機器のような機械装置への機械学習モデルの適用を検討すると、機械学習モデルは、どのようなデータを入力とした場合でも、何等かのデータを出力する。時として、機械学習モデルは、人間の想定外の出力結果、言い換えれば、信頼度が低い出力結果、を出力してしまうことが考えられる。仮に、機械学習モデルが出力した信頼度が低い出力結果をそのまま機械装置の制御に用いると、不測の事態に陥る可能性がある。
そこで、従来、機械学習モデルの出力自体にどれだけの不確実性が含まれているかを推論する技術が知られている。不確実性とは、ここでは、信頼度である。
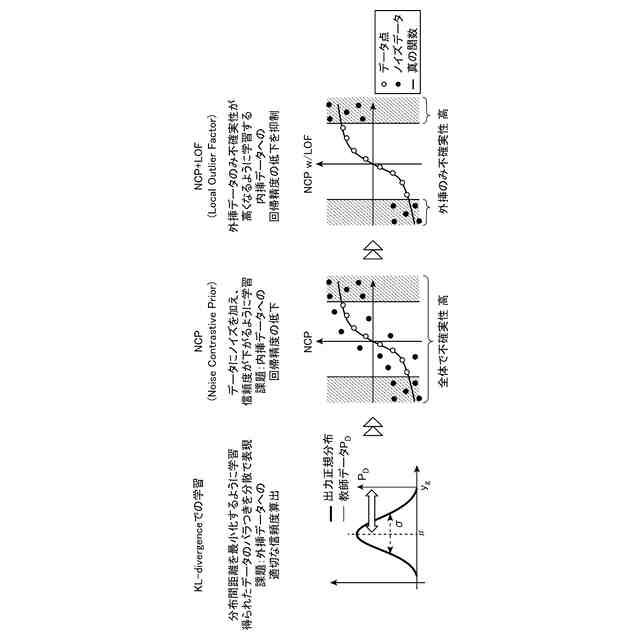
例えば、非特許文献1には、機械学習モデルの出力自体にどれだけの不確実性が含まれているかを幅の大きさで表現する技術であって、機械学習モデルの学習データにノイズを加えることで、学習していないデータ(外挿データ)に対して機械学習モデルが出力する不確実性の上記幅が大きくなるようにする技術が開示されている。
【先行技術文献】
【非特許文献】
【0003】
Danijar Hafner, Noise Contrastive Priors for Functional Uncertainty, 1 Jul 2019
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1に開示されている技術に代表される、不確実性を出力する従来技術では、学習データ全てに対してノイズを付与して機械学習モデルを学習しているため、機械学習モデルを用いた推論の際に、学習データに近いデータが入力され、良い予測値が出力されていたとしても、当該予測値とともに出力される不確実性が高くなってしまう可能性があるという課題があった。
【0005】
本開示は、上記のような課題を解決するためになされたものであり、予測値と不確実性を推論可能な機械学習モデルであって、従来の、学習データ全てに対してノイズを付与して機械学習モデルを学習する手法で作成された機械学習モデルと比較して、より精度よく不確実性の推論が可能な機械学習モデルを提供することを目的とする。
【課題を解決するための手段】
【0006】
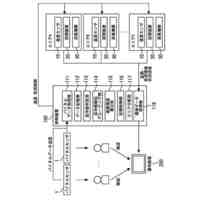
本開示に係る不確実性学習装置は、機械装置の運転結果に関する運転関連データに基づくデータを入力とし、運転関連データに対応する予測値と当該予測値の不確実性を出力する機械学習モデルを作成する不確実性学習装置であって、機械装置から得られた運転関連データに基づいて作成された学習データを取得する学習データ取得部と、学習データ取得部が取得した学習データに対してノイズを付与したノイズ付与後学習データを作成するノイズ付与部と、学習データ取得部が取得した学習データとノイズ付与部が作成したノイズ付与後学習データから外れ値スコアを算出する外れ値検知部と、学習データとノイズ付与後学習データとに基づき、外れ値検知部が算出した外れ値スコアに基づく重み付けがされた損失関数を計算し、機械学習モデルを学習するモデル学習部とを備えたものである。
【発明の効果】
【0007】
本開示によれば、上記のように構成したので、従来の、学習データ全てに対してノイズを付与して機械学習モデルを学習する手法で作成された機械学習モデルと比較して、より精度よく不確実性の推論が可能な機械学習モデルを提供することができる。
【図面の簡単な説明】
【0008】
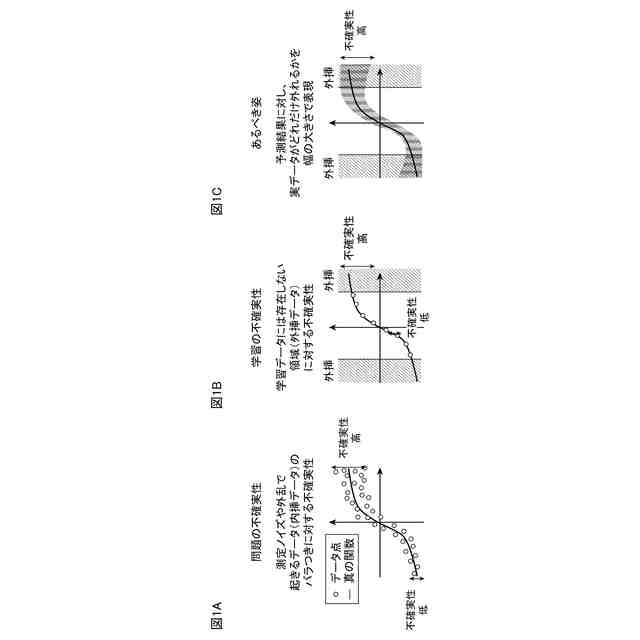
機械学習モデルが推論する不確実性の種類と、機械学習モデルによる理想的な不確実性の推論の一例について説明するための図であって、図1Aは問題の不確実性について説明するための図であり、図1Bは学習の不確実性について説明するための図であり、図1Cは理想的な不確実性について説明するための図である。
従来技術が有する課題であって、実施の形態1に係る不確実性学習装置が解決する課題について、より詳細に説明するための図である。
実施の形態1に係る不確実性学習装置を備えた不確実性学習システムの構成例を示す図である。
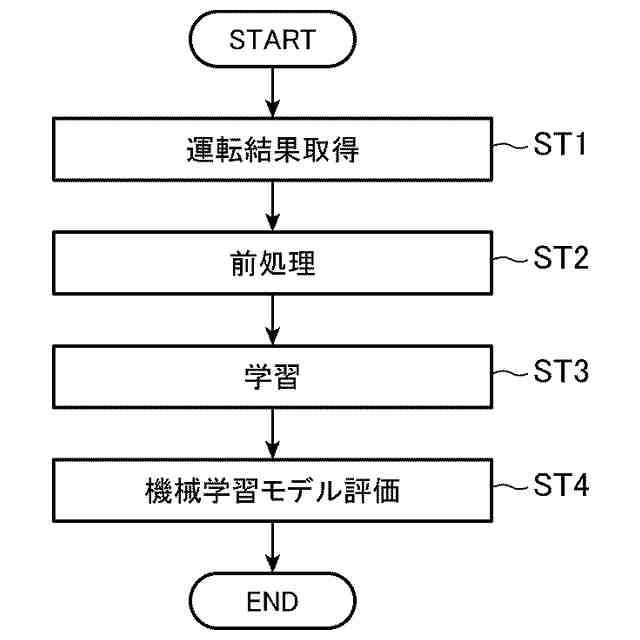
実施の形態1に係る不確実性学習装置の学習時の動作について説明するためのフローチャートである。
図4のステップST3の処理の詳細を説明するためのフローチャートである。
実施の形態1に係る不確実性学習装置の推論時の動作について説明するためのフローチャートである。
図7Aおよび図7Bは、実施の形態1に係る不確実性学習装置のハードウェア構成の一例を示す図である。
実施の形態2に係る不確実性学習装置を備えた不確実性学習システムの構成例を示す図である。
実施の形態2に係る不確実性学習装置の学習時の動作について説明するためのフローチャートである。
実施の形態2に係る不確実性学習装置の推論時の動作について説明するためのフローチャートである。
実施の形態3に係る不確実性学習装置を備えた不確実性学習システムの構成例を示す図である。
転移学習の一例について説明するための図であって、図12AはFine Tuningの一例を示す図であり、図12BはFeature Extractionの一例を示す図であり、図12CはJoint Trainingの一例を示す図である。
実施の形態3に係る不確実性学習装置の学習時の動作について説明するためのフローチャートである。
図13のステップST3aの処理の詳細を説明するためのフローチャートである。
実施の形態4に係る不確実性学習装置を備えた不確実性学習システムの構成例を示す図である。
実施の形態4に係る不確実性学習装置の動作について説明するためのフローチャートである。
【発明を実施するための形態】
【0009】
以下、本開示をより詳細に説明するために、本開示を実施するための形態について、添付の図面に従って説明する。
【0010】
実施の形態1.
実施の形態1に係る不確実性学習装置は、学習済みのモデル(以下「機械学習モデル」という。)を作成する。
機械学習モデルは、入力データに基づいて予測の値(以下「予測値」という。)と不確実性を出力する。不確実性は、機械学習モデルが予測値に対してどれだけ自信を持っているかの、予測の信頼度の程度を示す指標である。不確実性が高い場合、機械学習モデルは予測値に対して自信を持っていない、言い換えれば、予測値の信頼度が低いことを意味する。一方、不確実性が低い場合、機械学習モデルは、予測値に対して高い自信を持っている、言い換えれば、予測値の信頼度が高いと解釈できる。ユーザ等が、機械学習モデルが出力する予測値に対する不確実性を知ることは、適切な処理を行うために重要となる。ユーザ等は、不確実性の情報を利用することで、機械学習モデルによる予測のリスクを評価し、意思決定をより慎重に行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
送風機
12日前
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
照明器具
13日前
三菱電機株式会社
放電装置
20日前
三菱電機株式会社
電子機器
5日前
三菱電機株式会社
発光装置
20日前
三菱電機株式会社
照明器具
1日前
三菱電機株式会社
半導体装置
28日前
三菱電機株式会社
加熱調理器
14日前
三菱電機株式会社
光通信装置
20日前
三菱電機株式会社
半導体装置
21日前
三菱電機株式会社
半導体装置
21日前
三菱電機株式会社
半導体装置
27日前
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
半導体装置
1日前
三菱電機株式会社
半導体装置
1日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
給湯システム
2日前
三菱電機株式会社
空調システム
12日前
三菱電機株式会社
照明システム
今日
三菱電機株式会社
電力変換装置
2日前
三菱電機株式会社
見守りシステム
1日前
三菱電機株式会社
半導体製造装置
1か月前
三菱電機株式会社
換気空調システム
1か月前
三菱電機株式会社
自動運転システム
2日前
三菱電機株式会社
燃料電池システム
1日前
三菱電機株式会社
換気空調システム
1か月前
三菱電機株式会社
半導体モジュール
27日前
三菱電機株式会社
換気空調システム
1か月前
三菱電機株式会社
自己位置推定装置
1日前
三菱電機株式会社
移動体制御システム
2日前
三菱電機株式会社
手持ち式電気掃除機
13日前
三菱電機株式会社
モータ及び送風装置
12日前
三菱電機株式会社
アレーアンテナ装置
13日前
三菱電機株式会社
保護リレーシステム
27日前
三菱電機株式会社
水位変化検出システム
16日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ