TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025074798
公報種別
公開特許公報(A)
公開日
2025-05-14
出願番号
2023185847
出願日
2023-10-30
発明の名称
検査システム、検査装置、検査方法及びプログラム
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
G01N
23/18 20180101AFI20250507BHJP(測定;試験)
要約
【課題】はんだバンプを含む電子部品を実装した基板の高速な自動検査を可能にする技術を提供する。
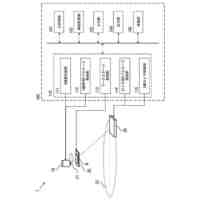
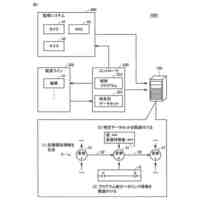
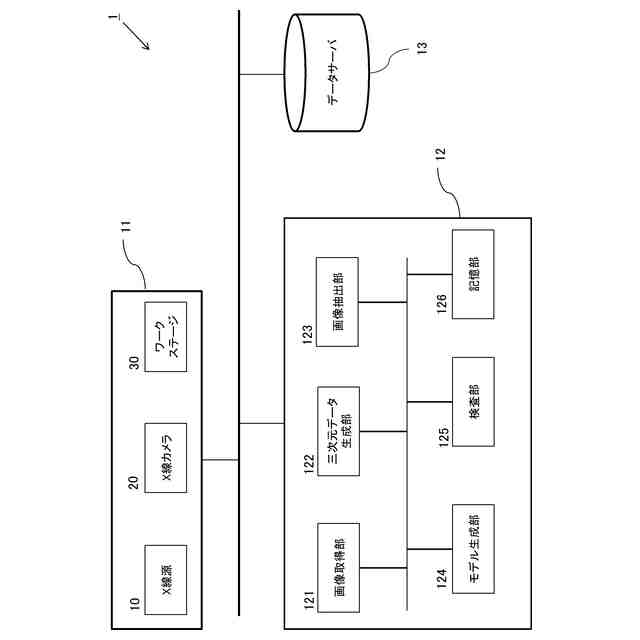
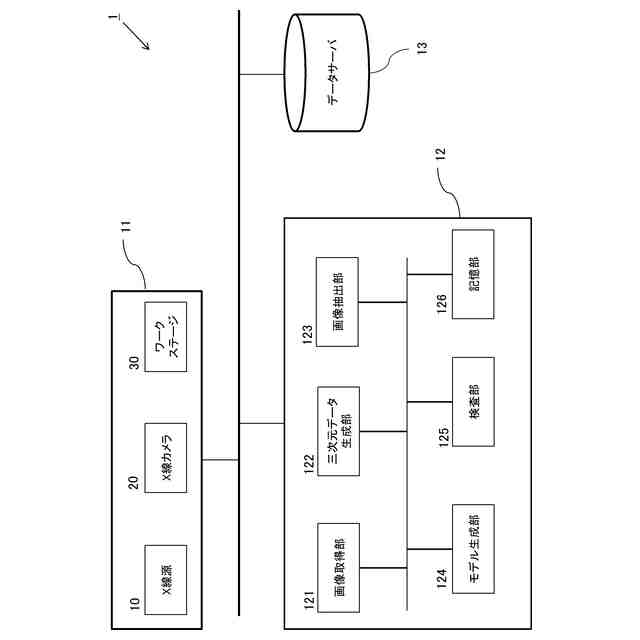
【解決手段】はんだバンプが形成された電子部品を実装した部品実装基板の検査を行う検査システムであって、前記部品実装基板を撮影したX線画像を複数用いて前記はんだバンプによるはんだ接合部を少なくとも含む領域の三次元データを生成する三次元データ生成手段と、前記三次元データから、前記はんだ接合部の中心部を通る縦断面を示す縦断面画像を抽出する縦断面画像抽出手段と、複数の前記縦断面画像を用いて前記検査用の検査モデルを生成する、検査モデル生成手段と、検査対象である個々の前記部品実装基板の前記三次元データから抽出した観察方向が異なる複数の前記縦断面画像を用いて、前記検査モデルによる検査を行う検査手段と、を有する検査システム。
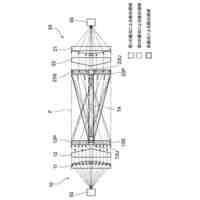
【選択図】図1
特許請求の範囲
【請求項1】
はんだバンプが形成された電子部品を実装した部品実装基板の検査を行う検査システムであって、
前記部品実装基板を撮影したX線画像を複数用いて前記はんだバンプによるはんだ接合部を少なくとも含む領域の三次元データを生成する三次元データ生成手段と、
前記三次元データから、前記はんだ接合部の中心部を通る縦断面を示す縦断面画像を抽出する縦断面画像抽出手段と、
複数の前記縦断面画像を用いて前記検査用の検査モデルを生成する、検査モデル生成手段と、
検査対象である個々の前記部品実装基板の前記三次元データから抽出した観察方向が異なる複数の前記縦断面画像を用いて、前記検査モデルによる検査を行う検査手段と、
を有する、検査システム。
続きを表示(約 1,400 文字)
【請求項2】
前記検査モデル生成手段の学習のために用いられる前記縦断面画像は、一つの前記三次元データごとに観察方向の異なる複数の前記縦断面画像を含んでいる、
ことを特徴とする、請求項1に記載の検査システム。
【請求項3】
前記縦断面画像抽出手段は、
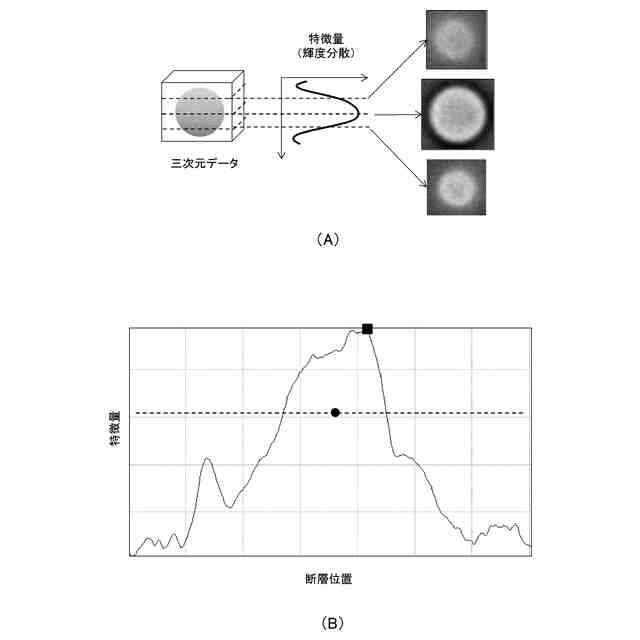
前記三次元データから取得する水平断層画像の輝度分散値を垂直方向にプロットし、該輝度分散値が最大となる断層の位置を、前記中心部を特定する垂直方向の位置とする、
ことを特徴とする、請求項1に記載の検査システム。
【請求項4】
前記縦断面画像抽出手段は、
前記三次元データから取得する水平断層画像の輝度分散値を垂直方向にプロットし、該輝度分散値が所定の閾値を超える複数の断層の中央となる断層の位置を、前記中心部を特定する垂直方向の位置とする、
ことを特徴とする、請求項1に記載の検査システム。
【請求項5】
前記縦断面画像抽出手段は、
前記三次元データから取得する水平断層画像のエッジ強度を垂直方向にプロットし、該エッジ強度が最大となる断層の位置を、前記中心部を特定する垂直方向の位置とする、
ことを特徴とする、請求項1に記載の検査システム。
【請求項6】
前記縦断面画像抽出手段は、
前記三次元データから取得する水平断層画像のエッジ強度を垂直方向にプロットし、該エッジ強度が所定の閾値を超える複数の断層の中央となる断層の位置を、前記中心部を特定する垂直方向の位置とする、
ことを特徴とする、請求項1に記載の検査システム。
【請求項7】
前記縦断面画像抽出手段は、
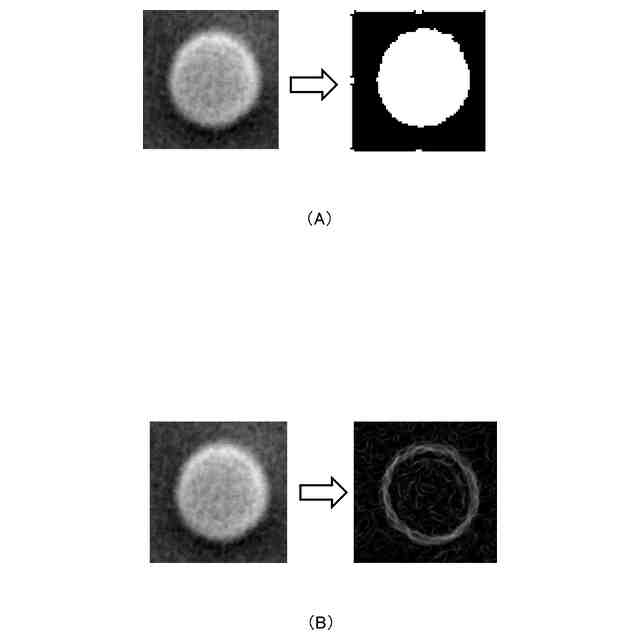
前記輝度分散値が最大となる水平断層画像を二値化した画像のラベルの中心、又は、前記輝度分散値が最大となる水平断層画像を輝度により重みづけして算出する重心、の位置を、前記中心部を特定する水平方向の位置とする、
ことを特徴とする、請求項3に記載の検査システム。
【請求項8】
前記縦断面画像出手段は、
前記輝度分散値が所定の閾値を超える複数の水平断層の中央となる水平断層画像を二値化した画像のラベルの中心、又は、前記輝度分散値が所定の閾値を超える複数の水平断層の中央となる水平断層画像を輝度により重みづけして算出する重心、の位置を、前記中心
部を特定する水平方向の位置とする、
ことを特徴とする、請求項4に記載の検査システム。
【請求項9】
前記縦断面画像抽出手段は、
前記エッジ強度が最大となる水平断層画像を二値化した画像のラベルの中心、又は、前記エッジ強度が最大となる水平断層画像を輝度により重みづけして算出する重心、の位置を、前記中心部を特定する水平方向の位置とする、
ことを特徴とする、請求項5に記載の検査システム。
【請求項10】
前記縦断面画像出手段は、
前記エッジ強度が所定の閾値を超える複数の水平断層の中央となる水平断層画像を二値化した画像のラベルの中心、又は、前記エッジ強度が所定の閾値を超える複数の水平断層の中央となる水平断層画像を輝度により重みづけして算出する重心、の位置を、前記中心部を特定する水平方向の位置とする、
ことを特徴とする、請求項6に記載の検査システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、検査システム、検査装置、検査方法及びプログラムに関し、特にX線CTを用いて取得した三次元データに基づき被検査物を検査する技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、各種製品の小型化、精密化が進んでおり、例えば部品実装基板などでも部品実装密度が増大し、外観検査装置の撮像視野の影になる部位が増えることにより、外観検査では正確には検査できない部品が増加している。そして、これに対して、X線CT検査により外観では検査できない部分の検査を実施する技術が公知となっている(例えば特許文献1、2)。
【先行技術文献】
【特許文献】
【0003】
特開2007-17304号公報
特開2000-275191号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、部品実装基板に用いられる電子部品には、例えばBGA(Ball Grid Array)などのようにパッケージ底面にはんだ接合用のバンプが形成されたものがある。このようなはんだバンプの不濡れ、マクラ不良といった不良の種別については、例えば特定の水平断層におけるはんだ面積等の特徴量を用いて閾値により良否判定を行うような単一の特徴量による検査では良否の識別が適正に行えないため、複数の特徴量による判定を組み合わせた複雑な検査が必要となってしまう。
【0005】
このような煩雑な検査に対しては、ディープラーニングなどの手法で学習した機械学習モデル(いわゆるAI)による検査が適しているが、三次元データ(3Dボクセル)に対する学習及び検査(推論)の計算コストが高く、高速な自動検査が困難であるという問題があった。
【0006】
本発明は、上記のような実情に鑑みてなされたものであり、はんだバンプを含む電子部品を実装した基板の高速な自動検査を可能にすることを目的とする。
【課題を解決するための手段】
【0007】
前記の目的を達成するために、本発明は以下の構成を採用する。即ち、
はんだバンプが形成された電子部品を実装した部品実装基板の検査を行う検査システムであって、
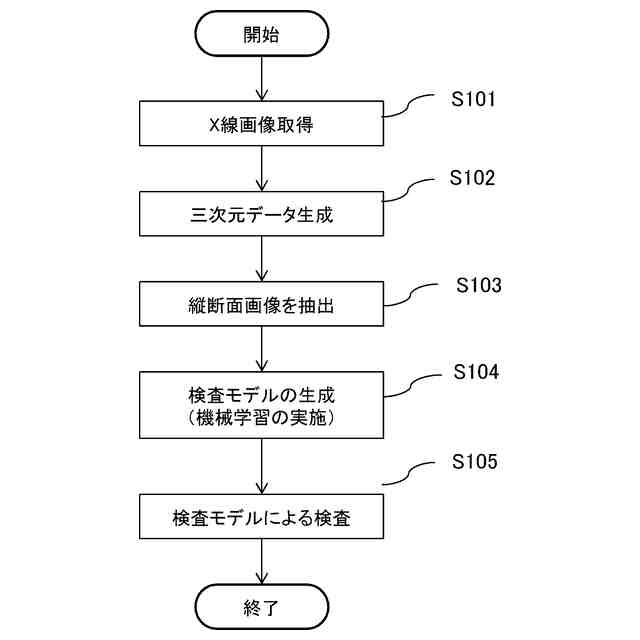
前記部品実装基板を撮影したX線画像を複数用いて前記はんだバンプによるはんだ接合部を少なくとも含む領域の三次元データを生成する三次元データ生成手段と、
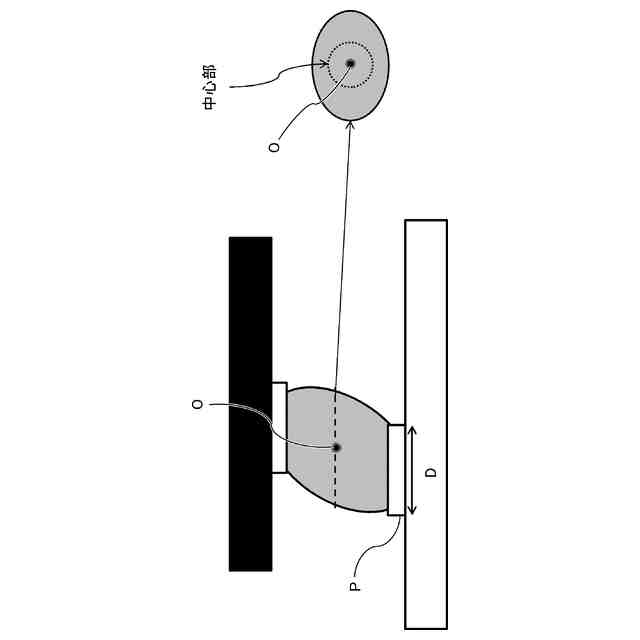
前記三次元データから、前記はんだ接合部の中心部を通る縦断面を示す縦断面画像を抽出する縦断面画像抽出手段と、
複数の前記縦断面画像を用いて前記検査用の検査モデルを生成する、検査モデル生成手段と、
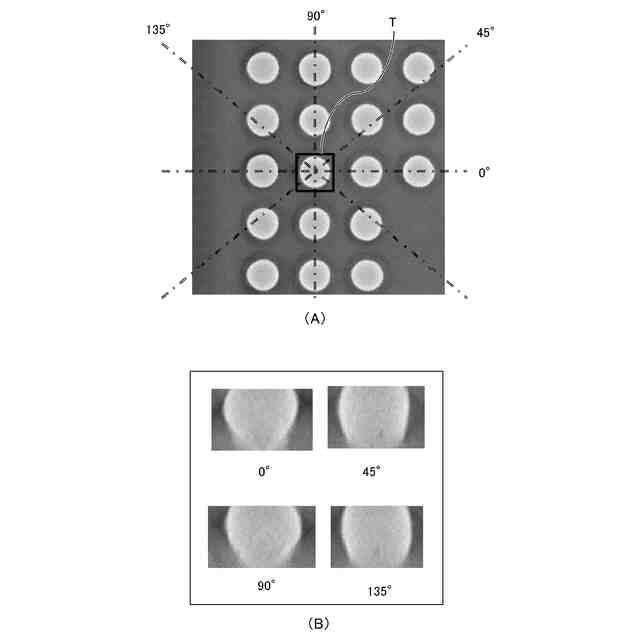
検査対象である個々の前記部品実装基板の前記三次元データから抽出した観察方向の異なる複数の前記縦断面画像を用いて、前記検査モデルによる検査を行う検査手段と、
を有する、検査システムである。
【0008】
なお、上記において、「中心部」とは、全くの中心点のみを指すのではなく、中心点近傍の領域を含む意味である。例えば、水平方向であれば、中心点からはんだ接合部のパッドの最も短い辺の半分の長さまでの範囲を中心部とすることができる。また、「検査モデル」とは、学習用データを用いて機械学習を行ったモデル(いわゆるAI)であり、検査モデルを生成することには当該学習を行わせることが含まれる。なお、機械学習は教師あり学習であってもよいし、教師なし学習であってもよい。
【0009】
このように、はんだ接合部の三次元データより抽出した縦断面画像(即ち二次元データ)を用いて検査モデル用の学習及び学習済の検査モデルを用いた検査を行うことで、BGAなどのようにパッケージ底面にはんだバンプが形成されているような部品が実装された部品実装基板の検査であっても、高速で高精度な検査を実施することが可能になる。
【0010】
また前記検査モデル生成手段の学習のために用いられる前記縦断面画像は、一つの前記三次元データごとに観察方向の異なる複数の前記縦断面画像を含んでいてもよい。このように、一つの三次元データ即ち一つの検査部位ごとに、観察方向の異なる複数の縦断面画像を抽出することで、学習の効率と精度を向上させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
充電装置
5日前
オムロン株式会社
光電センサ
1か月前
オムロン株式会社
電力開閉器
1日前
オムロン株式会社
電磁継電器
23日前
オムロン株式会社
電磁継電器
23日前
オムロン株式会社
スレーブ装置
26日前
オムロン株式会社
トリガスイッチ
22日前
オムロン株式会社
トリガスイッチ
1か月前
オムロン株式会社
スイッチング素子
1か月前
オムロン株式会社
モバイルロボット
1か月前
オムロン株式会社
モバイルロボット
1か月前
オムロン株式会社
光干渉測距センサ
1か月前
オムロン株式会社
回転装置及びマウス
26日前
オムロン株式会社
電力開閉器及び電気機器
1日前
オムロン株式会社
電力変換装置とその制御方法
1か月前
オムロン株式会社
情報取得装置、及び自動改札機
26日前
オムロン株式会社
制御装置、方法、及びプログラム
1か月前
オムロン株式会社
情報処理システム、情報処理方法
1か月前
オムロン株式会社
X線撮影システム及びX線検査装置
12日前
オムロン株式会社
モデル生成方法及び推論プログラム
1か月前
オムロン株式会社
表示装置およびこれを備えた展示装置
1か月前
オムロン株式会社
コントローラ、方法およびプログラム
1日前
オムロン株式会社
表示装置およびこれを備えた展示装置
1か月前
オムロン株式会社
解析装置、解析方法およびプログラム
9日前
オムロン株式会社
多関節ロボット、及びモバイルロボット
1か月前
オムロン株式会社
学習装置、操作情報変換装置及び学習方法
26日前
オムロン株式会社
評価装置、評価方法および評価プログラム
8日前
オムロン株式会社
協調作業システム、方法およびプログラム
26日前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
12日前
オムロン株式会社
信号制御システム、およびステップアップ方法
1か月前
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
8日前
オムロン株式会社
スイッチユニットおよびこれを備えた展示装置
1か月前
オムロン株式会社
スイッチユニットおよびこれを備えた展示装置
1か月前
オムロン株式会社
蓄電装置、蓄電システム、制御方法及びプログラム
11日前
オムロン株式会社
検査システム、検査装置、検査方法及びプログラム
10日前
オムロン株式会社
状態推定装置、状態推定方法及び状態推定プログラム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ