TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025078749
公報種別
公開特許公報(A)
公開日
2025-05-20
出願番号
2025033838,2021032211
出願日
2025-03-04,2021-03-02
発明の名称
ロボットシステム、トルクセンサ、変位検出装置、検出方法、物品の製造方法、プログラム及び記録媒体
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
19/02 20060101AFI20250513BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】検出精度を向上させること。
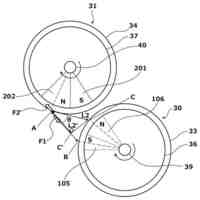
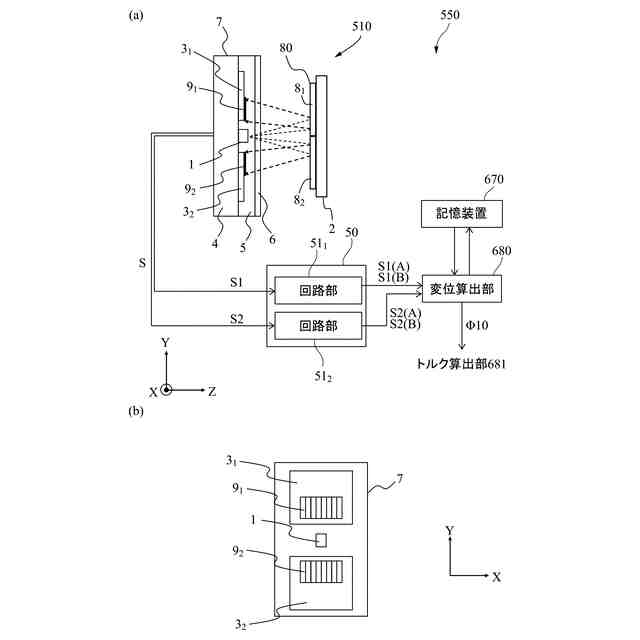
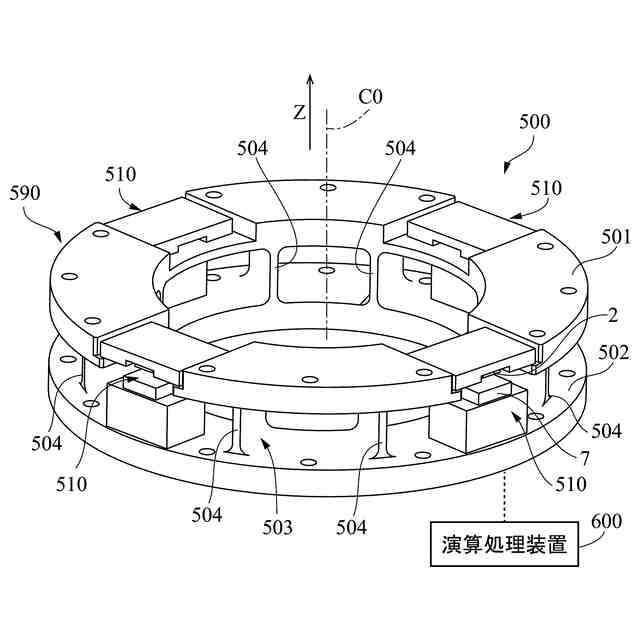
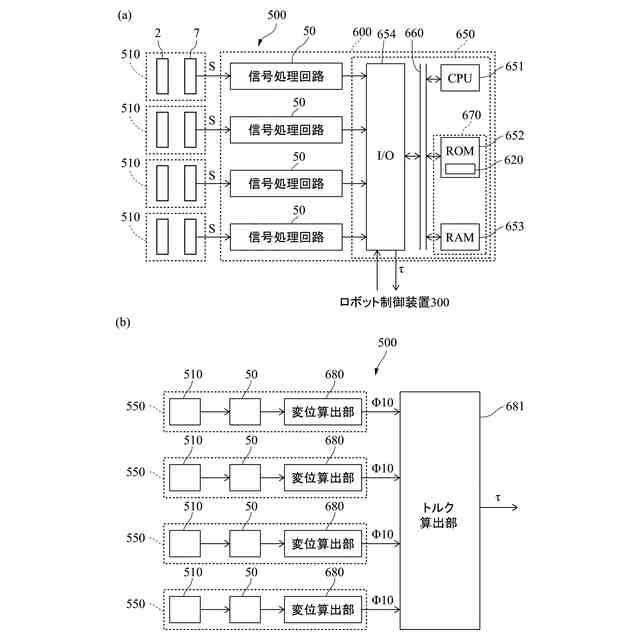
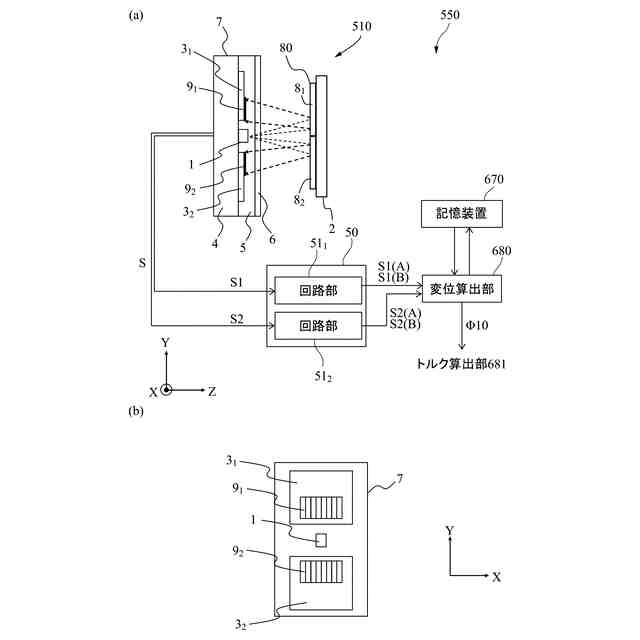
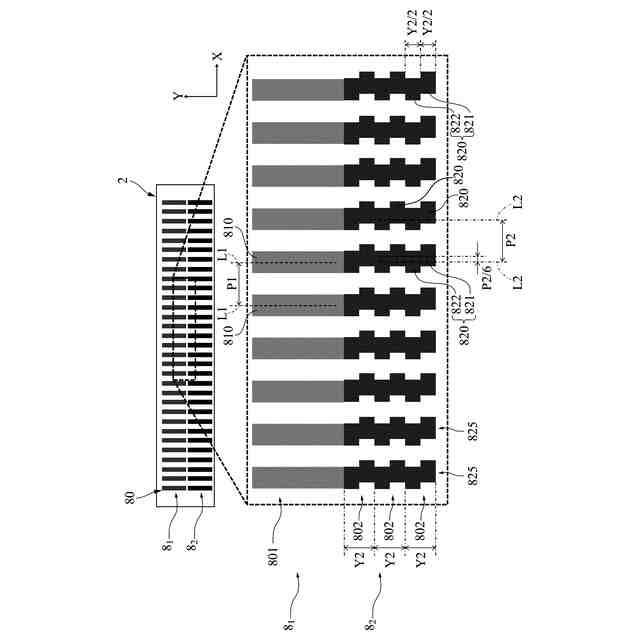
【解決手段】エンコーダ装置550は、エンコーダ510と、エンコーダ510からの検出信号Sに基づく正弦波信号S1(A)~S2(B)を用いてトルク値を求めるのに用いる位相Φ10を求める変位算出部680と、を備える。エンコーダ510は、パターン部80を含むスケール2と、スケール2に対向して配置され、スケール2のパターン部80を読み取って検出信号Sを出力するセンサヘッド7と、を有する。変位算出部680は、正弦波信号S1(A)~S2(B)に基づいて、センサヘッド7に対するスケール2の相対的なX方向及びY方向の変位量を求め、その演算結果に基づいて位相Φ10を求める。
【選択図】図6
特許請求の範囲
【請求項1】
減速機、及び少なくとも1つのエンコーダを関節に有するロボットと、
前記エンコーダの検出信号に基づく位相情報を用いてトルク値を求める処理部と、を備え、
前記エンコーダは、
パターン部を含むスケールと、
前記スケールに対向して配置され、前記スケールの前記パターン部を読み取って前記検出信号を出力するヘッドと、を有し、
前記処理部は、
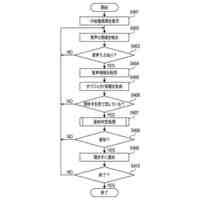
前記位相情報に基づいて、前記ヘッドに対する前記スケールの相対的な第1方向の第1変位量、及び前記ヘッドに対する前記スケールの相対的な前記第1方向と交差する第2方向の第2変位量を求め、
前記第1変位量及び前記第2変位量に基づいて、前記トルク値を求める、
ことを特徴とするロボットシステム。
続きを表示(約 1,300 文字)
【請求項2】
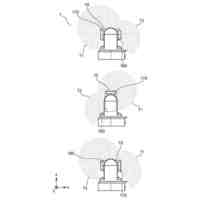
前記パターン部は、
前記第1方向に周期的に配置された複数の第1パターン要素を含み、前記複数の第1パターン要素の各々が前記第2方向に延びる第1軸線に対して対称な形状である、少なくとも1つの第1パターン列と、
前記第1方向に周期的に配置された複数の第2パターン要素を含み、前記複数の第2パターン要素の各々が前記第2方向に延びる第2軸線に対して非対称な形状である、少なくとも1つの第2パターン列と、を有する、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項3】
前記少なくとも1つの第2パターン列は、前記第2方向に連続して配置された複数の第2パターン列を有する、
ことを特徴とする請求項2に記載のロボットシステム。
【請求項4】
前記少なくとも1つの第1パターン列は、複数の第1パターン列を有し、
前記少なくとも1つの第2パターン列は、複数の第2パターン列を有し、
前記複数の第1パターン列と前記複数の第2パターン列とは、前記第2方向に交互に配置されている、
ことを特徴とする請求項2に記載のロボットシステム。
【請求項5】
前記位相情報は、前記ヘッドが前記少なくとも1つの第1パターン列を読み取ったことにより得られる第1情報と、前記ヘッドが前記少なくとも1つの第2パターン列を読み取ったことにより得られる第2情報と、を含み、
前記処理部は、
前記第1情報から前記第1変位量を求め、
前記第2情報及び前記第1変位量から前記第2変位量を求める、
ことを特徴とする請求項2乃至4のいずれか1項に記載のロボットシステム。
【請求項6】
前記処理部は、
前記ロボットの軌道データに対応する補正値で前記第1変位量および前記第2変位量の少なくとも一方を補正することにより得られる変位情報から前記トルク値を求める、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項7】
前記パターン部は、
前記第1方向に周期的に配置された複数のパターン要素を含み、前記複数のパターン要素の各々が前記第1方向と交差する第2方向に延びる軸線に対して非対称な形状である、少なくとも1つのパターン列を有する、
ことを特徴とする請求項6に記載のロボットシステム。
【請求項8】
前記少なくとも1つのパターン列は、前記第2方向に連続して配置された複数のパターン列を有する、
ことを特徴とする請求項7に記載のロボットシステム。
【請求項9】
前記減速機は、波動歯車減速機である、
ことを特徴とする請求項1乃至8のいずれか1項に記載のロボットシステム。
【請求項10】
前記処理部は、さらに前記関節の回転方向の変位に基づいて前記トルク値を求める、
ことを特徴とする請求項9に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、センシング技術に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
工場等の生産ラインには、製造する物品の生産性を向上させるため、産業用ロボットが配置される。産業用ロボットには、作業者と協働作業が可能な協働ロボットがある。特許文献1には、作業者や物体との接触を検出するためにトルクセンサを搭載した産業用ロボットが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-104249号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
トルクセンサは、エンコーダ装置などの変位検出装置を搭載しており、変位検出装置によって検出された変位情報を用いてトルク値を求める。近年、ロボットなどの駆動装置には、正確な動作が要求されるようになってきており、このため、トルクセンサ、即ち変位検出装置においては、高い検出精度が要求されるようになってきている。
【0005】
そこで、本発明は、検出精度を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明のロボットシステムは、減速機、及び少なくとも1つのエンコーダを関節に有するロボットと、前記エンコーダの検出信号に基づく位相情報を用いてトルク値を求める処理部と、を備え、前記エンコーダは、パターン部を含むスケールと、前記スケールに対向して配置され、前記スケールの前記パターン部を読み取って前記検出信号を出力するヘッドと、を有し、前記処理部は、前記位相情報に基づいて、前記ヘッドに対する前記スケールの相対的な第1方向の第1変位量、及び前記ヘッドに対する前記スケールの相対的な前記第1方向と交差する第2方向の第2変位量を求め、前記第1変位量及び前記第2変位量に基づいて、前記トルク値を求める、ことを特徴とする。
【0007】
また、本発明のトルクセンサは、駆動装置に配置される少なくとも1つのエンコーダと、前記エンコーダからの検出信号に基づく位相情報を用いてトルク値を求める処理部と、を備え、前記エンコーダは、パターン部を含むスケールと、前記スケールに対向して配置され、前記スケールの前記パターン部を読み取って前記検出信号を出力するヘッドと、を有し、前記処理部は、前記位相情報に基づいて、前記ヘッドに対する前記スケールの相対的な第1方向の第1変位量、及び前記ヘッドに対する前記スケールの相対的な前記第1方向と交差する第2方向の第2変位量を求め、前記第1変位量及び前記第2変位量に基づいて、前記トルク値を求める、ことを特徴とする。
【0008】
また、本発明の変位検出装置は、減速機を有する駆動装置に配置されるエンコーダと、前記エンコーダからの検出信号に基づく位相情報を用いて第1方向の変位情報を求める処理部と、を備え、前記エンコーダは、パターン部を含むスケールと、前記スケールに対向して配置され、前記スケールの前記パターン部を読み取って前記検出信号を出力するヘッドと、を含み、前記処理部は、前記位相情報に基づいて、前記ヘッドに対する前記スケールの相対的な前記第1方向の第1変位量、及び前記ヘッドに対する前記スケールの相対的な前記第1方向と交差する第2方向の第2変位量を求め、前記第1変位量及び前記第2変位量に基づいて前記変位情報を求める、ことを特徴とする。
【0009】
また、本発明の検出方法は、減速機を有する駆動装置に配置されたエンコーダが、パターン部を含むスケールと、前記スケールに対向して配置され、前記スケールの前記パターン部を読み取って検出信号を出力するヘッドと、を有し、処理部が、前記検出信号に基づく位相情報を用いてトルク値を求める検出方法であって、前記処理部が、前記位相情報に基づいて、前記ヘッドに対する前記スケールの相対的な第1方向の第1変位量、及び前記ヘッドに対する前記スケールの相対的な前記第1方向と交差する第2方向の第2変位量を求め、前記処理部が、前記第1変位量及び前記第2変位量に基づいて、前記トルク値を求める、ことを特徴とする。
【発明の効果】
【0010】
本発明によれば、検出精度が向上する。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
21日前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
清掃装置
7日前
キヤノン株式会社
撮像装置
20日前
キヤノン株式会社
撮像装置
28日前
キヤノン株式会社
通信装置
8日前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
電子機器
28日前
キヤノン株式会社
撮像装置
28日前
キヤノン株式会社
現像装置
8日前
キヤノン株式会社
現像装置
8日前
キヤノン株式会社
現像装置
8日前
キヤノン株式会社
電子機器
24日前
キヤノン株式会社
撮像装置
22日前
キヤノン株式会社
記録装置
22日前
キヤノン株式会社
撮像装置
24日前
キヤノン株式会社
電子機器
13日前
キヤノン株式会社
撮像装置
7日前
キヤノン株式会社
プログラム
1か月前
キヤノン株式会社
プログラム
1か月前
キヤノン株式会社
プログラム
1か月前
キヤノン株式会社
光走査装置
1日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
静電捕集装置
7日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
液体吐出装置
22日前
キヤノン株式会社
欠陥検査装置
22日前
キヤノン株式会社
画像形成装置
22日前
キヤノン株式会社
映像表示装置
24日前
キヤノン株式会社
静電捕集装置
7日前
キヤノン株式会社
光電変換装置
20日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像処理装置
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ