TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025078918
公報種別
公開特許公報(A)
公開日
2025-05-21
出願番号
2023191223
出願日
2023-11-09
発明の名称
処理装置、処理方法、及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G01S
17/89 20200101AFI20250514BHJP(測定;試験)
要約
【課題】高精度かつ高密度な3次元距離情報を取得可能な処理装置を提供すること。
【解決手段】処理装置は、第一の視点から見た被写体までの距離情報を用いて第二の視点から見た距離画像を生成する生成手段と、距離画像における基準画素の近傍領域に含まれる画素の距離値に応じて、距離値を修正するかどうかを決定する修正手段とを有する。
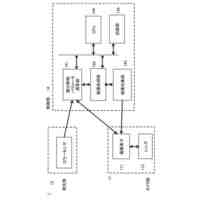
【選択図】図1
特許請求の範囲
【請求項1】
第一の視点から見た被写体までの距離情報を用いて第二の視点から見た距離画像を生成する生成手段と、
前記距離画像における基準画素の近傍領域に含まれる画素の距離値に応じて、前記距離値を修正するかどうかを決定する修正手段とを有することを特徴とする処理装置。
続きを表示(約 920 文字)
【請求項2】
前記修正手段は、前記基準画素の基準距離値を基準として前記距離値との差分が第1所定値より大きい場合、前記距離値を修正し、前記差分が前記第1所定値より小さい場合、前記距離値を修正しないことを特徴とする請求項1に記載の処理装置。
【請求項3】
前記修正手段は、前記距離値が第2所定値より大きい場合、前記距離値を修正し、前記距離値が前記第2所定値より小さい場合、前記距離値を修正しないことを特徴とする請求項1に記載の処理装置。
【請求項4】
前記距離情報は、レーザー光、電磁波、及び音波の少なくとも一つを用いて取得されることを特徴とする請求項1乃至3の何れか一項に記載の処理装置。
【請求項5】
前記距離情報は、点群、ボクセル、ポリゴン、メッシュ、陰関数表示、デプスマップ、視差マップ、及び深度マップの少なくとも一つで構成され、
前記距離画像は、デプスマップ、視差マップ、及び深度マップのいずれかであることを特徴とする請求項1乃至3の何れか一項に記載の処理装置。
【請求項6】
前記近傍領域は、前記基準画素を含む複数の画素により構成され、
前記修正手段は、前記複数の画素の少なくとも一つの距離値を修正することを特徴とする請求項1乃至3の何れか一項に記載の処理装置。
【請求項7】
前記修正手段は、前記基準画素の基準距離値が第3所定値以上である場合、前記距離値を修正する処理を実行しないことを特徴とする請求項1乃至3の何れか一項に記載の処理装置。
【請求項8】
前記近傍領域を設定する設定手段を更に有することを特徴とする請求項1乃至3の何れか一項に記載の処理装置。
【請求項9】
前記設定手段は、前記基準画素の基準距離値に応じて前記近傍領域の大きさを設定することを特徴とする請求項8に記載の処理装置。
【請求項10】
前記第二の視点は、撮像画像を取得する撮像手段の視点であることを特徴とする請求項1乃至3の何れか一項に記載の処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、処理装置、処理方法、及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、様々な用途で活用されている3次元距離情報は、高精度・高密度であることが求められている。高精度な3次元距離情報の取得手段として、LiDARセンサをはじめとする3次元測距装置が知られている。
【0003】
一方、高密度な3次元距離情報は、取得に時間を要するため移動体への適用が困難であり、また、情報量が多く、処理負荷が増大する。非特許文献1には、3次元距離情報をデプスマップ形式に変換する方法が開示されている。デプスマップとは、各画素に被写体までの距離に対応する値(例えば、距離に比例した値)が画素値として格納された画像データである。一般的に、3次元測距装置は一定のサンプリング間隔でデータを取得するため、デプスマップに射影した際に、画素値が格納されていない画素が発生する。このような疎なデプスマップをカメラで撮影した画像と合わせてCNN(Convolutional Neural Network)に入力することで、全画素に画素値が格納された密なデプスマップを得ることができる。
【先行技術文献】
【非特許文献】
【0004】
Xinjing Cheng, Peng Wang and Ruigang Yang,”Depth Estimation via Affinity Learned with Convolutional Spatial Propagation Network”
【発明の概要】
【発明が解決しようとする課題】
【0005】
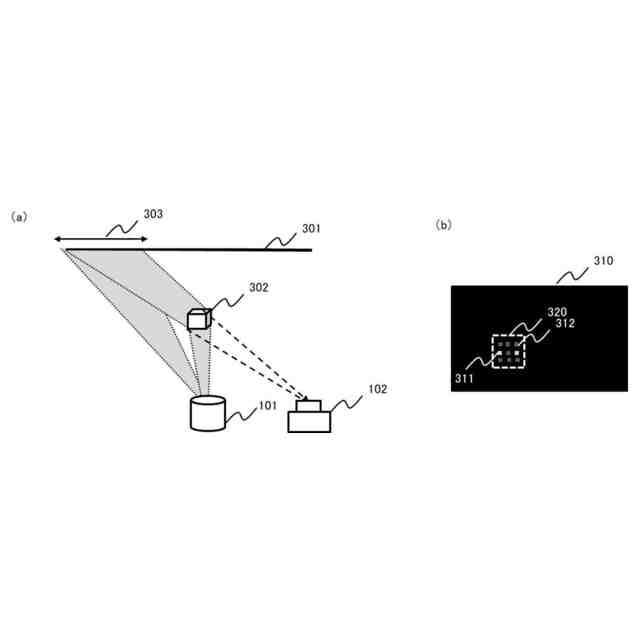
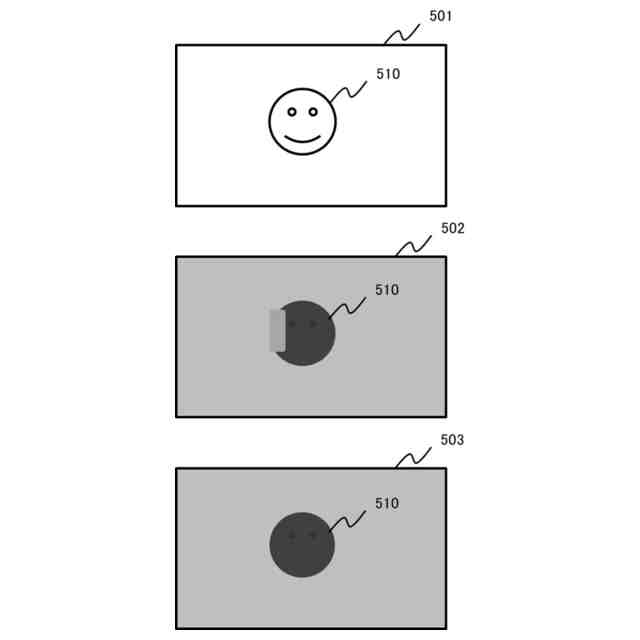
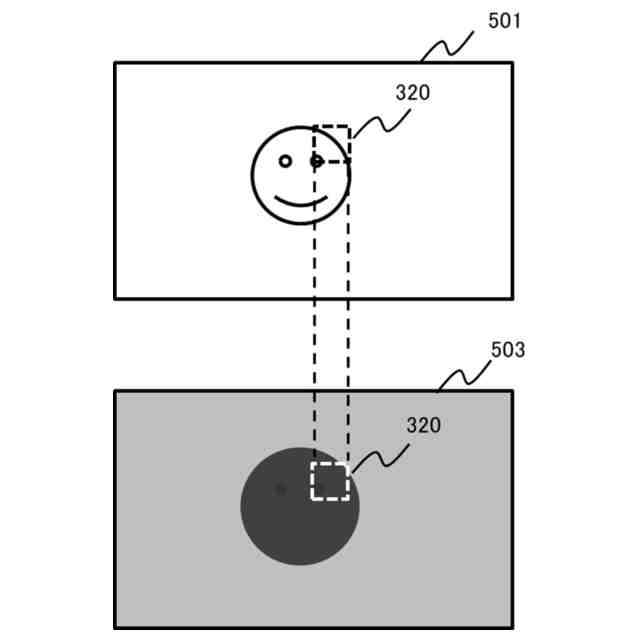
3次元測距装置とカメラの視点位置が異なる場合、3次元測距装置とカメラの視点では被写体間の遮蔽関係が異なる場合がある。すなわち、3次元測距装置から見た場合に、遮蔽されていない遠方の被写体が、カメラから見た場合に近傍の被写体に遮蔽される状況が発生しうる。このような状況下においてカメラから見たデプスマップを生成すると、デプスマップが疎であるため、遠方の被写体の距離に対応する値がデプスマップに格納されてしまう。したがって、非特許文献1の方法を用いて密なデプスマップを生成すると、被写体境界付近の距離値が不正確になり、正確な3次元距離情報を再現することができない。
【0006】
本発明は、高精度かつ高密度な3次元距離情報を取得可能な処理装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一側面としての処理装置は、第一の視点から見た被写体までの距離情報を用いて第二の視点から見た距離画像を生成する生成手段と、距離画像における基準画素の近傍領域に含まれる画素の距離値に応じて、距離値を修正するかどうかを決定する修正手段とを有することを特徴とする。
【発明の効果】
【0008】
本発明によれば、高精度かつ高密度な3次元距離情報を取得可能な処理装置を提供することができる。
【図面の簡単な説明】
【0009】
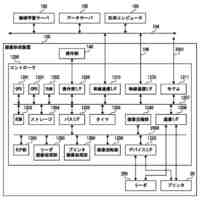
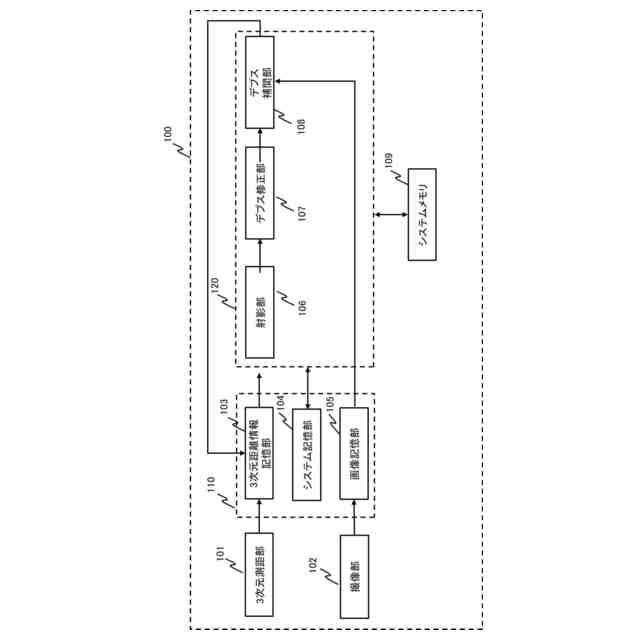
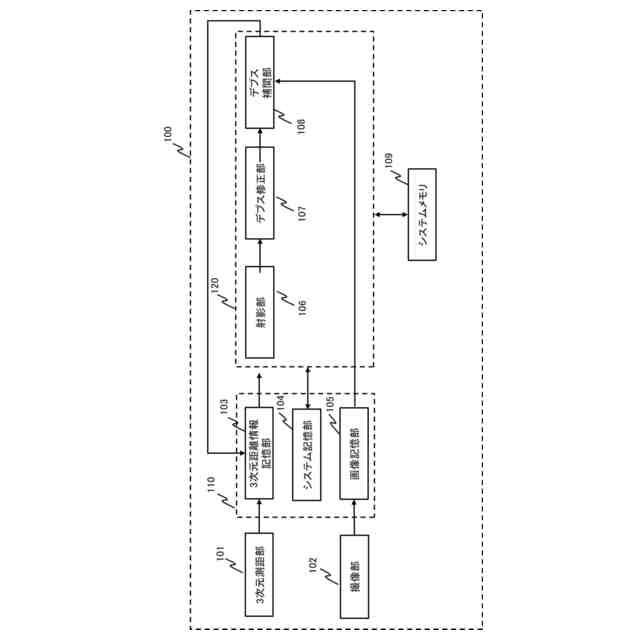
実施例1の3次元距離情報処理装置のブロック図である。
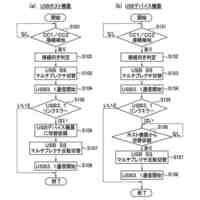
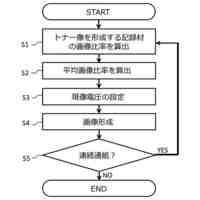
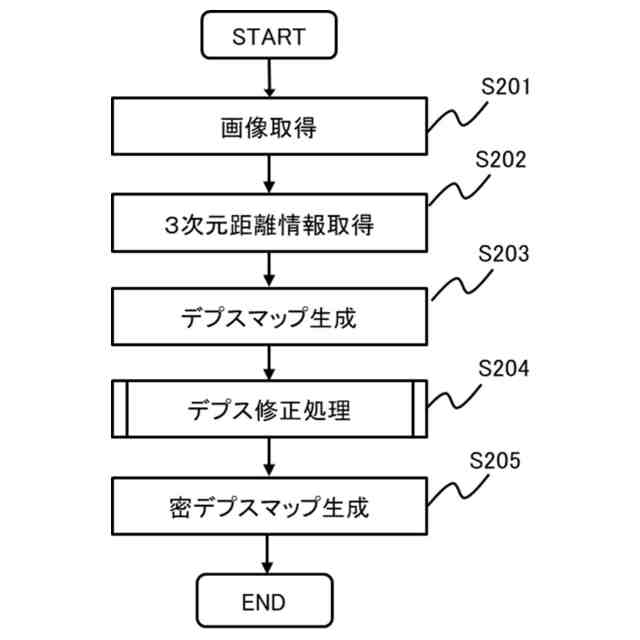
3次元距離情報処理を示すフローチャートである。
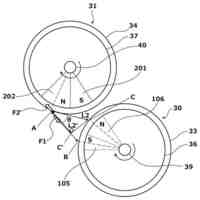
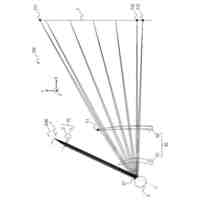
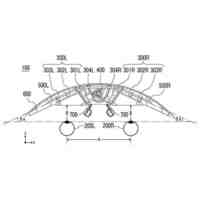
3次元距離情報及び画像を取得する概念図である。
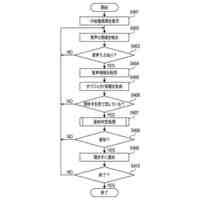
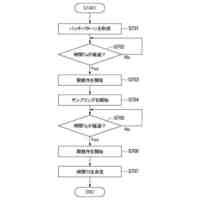
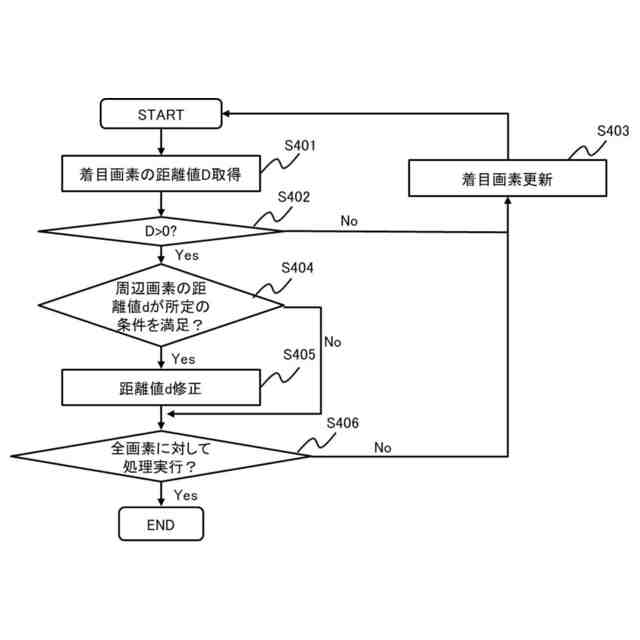
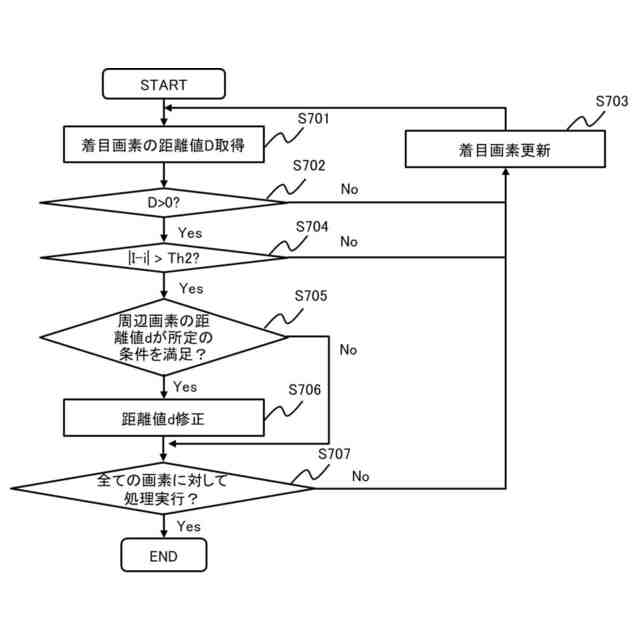
実施例1のデプス修正処理を示すフローチャートである。
実施例1の構成の効果の説明図である。
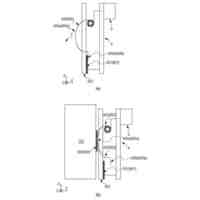
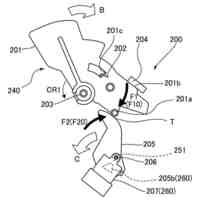
実施例2のデプス修正部の動作を示す概念図である。
実施例2のデプス修正処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施例について、図面を参照しながら詳細に説明する。各図において、同一の部材については同一の参照番号を付し、重複する説明は省略する。
【実施例】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
21日前
キヤノン株式会社
撮像装置
28日前
キヤノン株式会社
現像装置
8日前
キヤノン株式会社
記録装置
22日前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
撮像装置
24日前
キヤノン株式会社
撮像装置
20日前
キヤノン株式会社
清掃装置
7日前
キヤノン株式会社
撮像装置
7日前
キヤノン株式会社
現像装置
8日前
キヤノン株式会社
電子機器
13日前
キヤノン株式会社
撮像装置
22日前
キヤノン株式会社
電子機器
24日前
キヤノン株式会社
通信装置
8日前
キヤノン株式会社
現像装置
8日前
キヤノン株式会社
光走査装置
1日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
液体吐出装置
9日前
キヤノン株式会社
液体吐出装置
22日前
キヤノン株式会社
画像処理装置
9日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像読取装置
21日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
光電変換装置
20日前
キヤノン株式会社
推論処理装置
20日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像表示装置
20日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
情報処理装置
20日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ