TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025078985
公報種別
公開特許公報(A)
公開日
2025-05-21
出願番号
2023191358
出願日
2023-11-09
発明の名称
車両用駆動力伝達制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60K
17/346 20060101AFI20250514BHJP(車両一般)
要約
【課題】車輪にスリップを生じさせる走行およびスリップを生じさせない走行のいずれであっても挙動を安定させる。
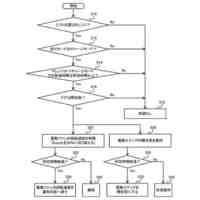
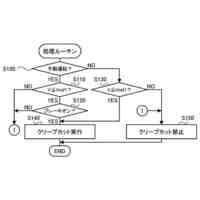
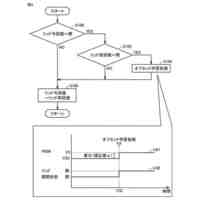
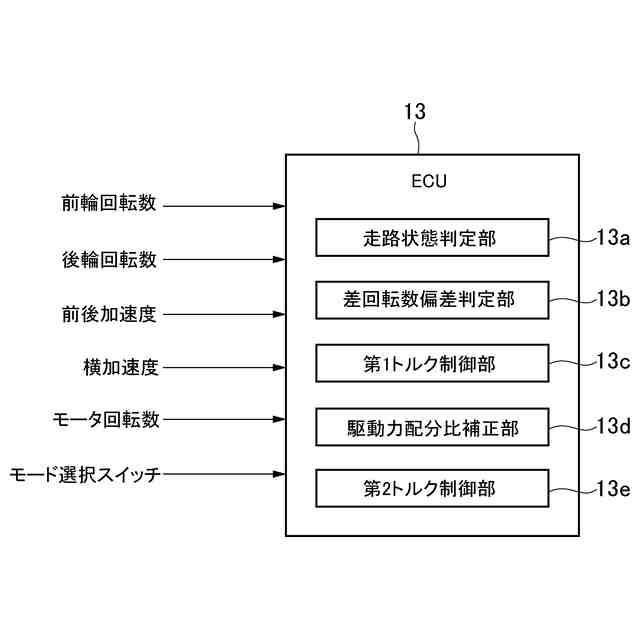
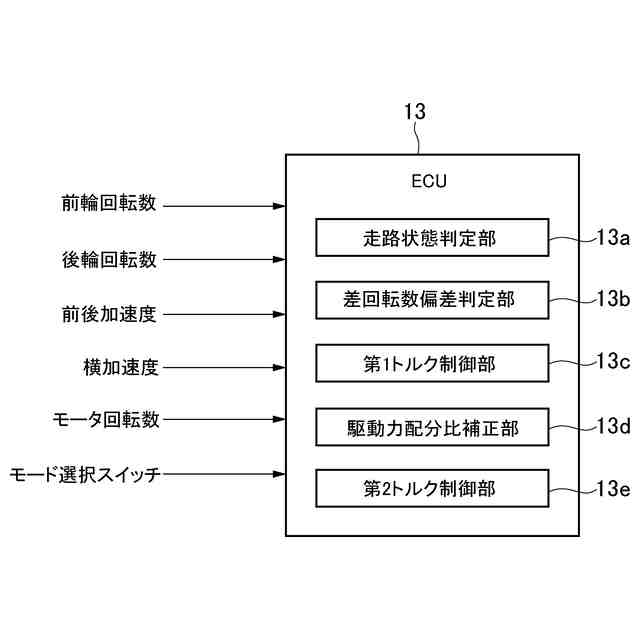
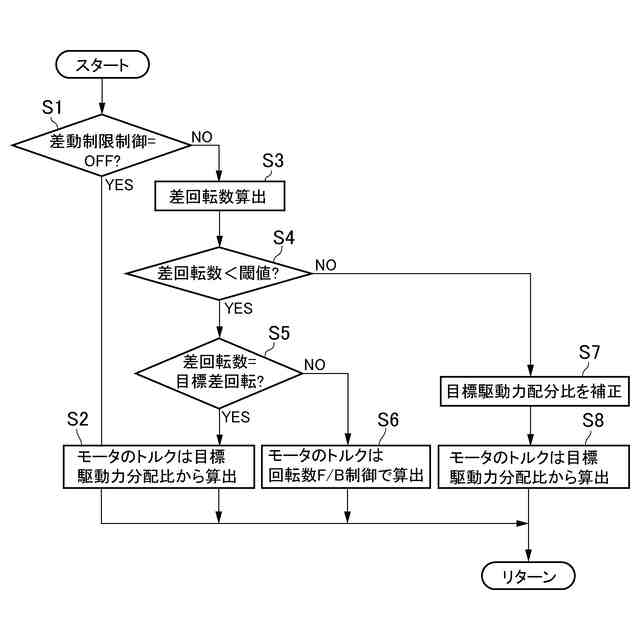
【解決手段】コントローラ13は、差回転数が閾値より小さくなる走行状態もしくは大きくなる走行状態か否かを判定する走行状態判定部13aと、差回転数が閾値より小さくなる走行状態であることが判定された場合に、差回転数と目標差回転数との偏差があるか否かを判定する差回転数偏差判定部13bと、偏差が小さくなるように偏差に基づいてモータのトルクを制御する第1トルク制御部13cと、差回転数が閾値以上となる走行状態であることが判定された場合に、目標差回転数と差回転数との偏差を少なくする補正トルク値に基づいて、第1出力側と第2出力側とへの目標駆動力配分比を補正する駆動力配分比補正部13dと、駆動力配分比補正部で補正された目標駆動力配分比に基づいてモータのトルクを制御する第2トルク制御部13eとを備えている。
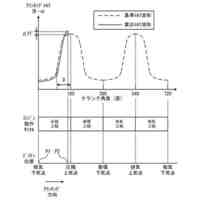
【選択図】図3
特許請求の範囲
【請求項1】
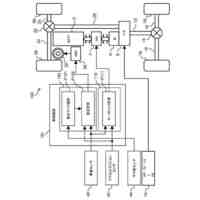
駆動力源が出力したトルクを第1出力側と第2出力側とに分配するとともに前記第1出力側と前記第2出力側との差動回転を行わせる分配機構と、前記第1出力側と前記第2出力側との前記分配機構による差回転数を制御するモータとを備えた車両用駆動力伝達制御装置であって、
前記分配機構は、前記駆動力源からトルクが入力されかつ前記第1出力側にトルクを出力する第1回転要素と、前記第2出力側にトルクを出力する第2回転要素と、前記モータが連結された第3回転要素とによって差動作用を行う差動機構から構成され、
前記モータを制御するコントローラを更に備え、
前記コントローラは、
前記差回転数が予め定めた閾値より小さくなる走行状態もしくは大きくなる走行状態か否かを判定する走行状態判定部と、
前記差回転数が前記閾値より小さくなる走行状態であることが判定された場合に、前記差回転数と予め定めた目標差回転数との偏差があるか否かを判定する差回転数偏差判定部と、
前記偏差があることが前記差回転数偏差判定部で判定された場合に、前記偏差が小さくなるように前記偏差に基づいて前記モータのトルクを制御する第1トルク制御部と、
前記差回転数が前記予め定めた閾値以上となる走行状態であることが前記走行状態判定部で判定された場合に、予め定めた目標差回転数と前記差回転数との偏差を少なくする補正トルク値に基づいて、前記第1出力側と前記第2出力側とへの目標駆動力配分比を補正する駆動力配分比補正部と、
前記駆動力配分比補正部で補正された目標駆動力配分比に基づいて前記モータのトルクを制御する第2トルク制御部とを備えている
ことを特徴とする車両用駆動力伝達制御装置。
続きを表示(約 920 文字)
【請求項2】
請求項1に記載の車両用駆動力伝達制御装置であって、
前記コントローラは、前記差回転数を前記モータの回転数に基づいて求める
ことを特徴とする車両用駆動力伝達制御装置。
【請求項3】
請求項1または2に記載の車両用駆動力伝達制御装置であって、
前記コントローラは、前記差回転数が前記予め定めた閾値以上であることが前記走行状態判定部で判定された場合の前記予め定めた目標差回転数を「0」に設定する
ことを特徴とする車両用駆動力伝達制御装置。
【請求項4】
請求項1または2に記載の車両用駆動力伝達制御装置であって、
前記走行状態判定部は、前記差回転数に基づいて、前記差回転数が予め定めた閾値より小さくなる走行状態もしくは大きくなる走行状態を判定する
ことを特徴とする車両用駆動力伝達制御装置。
【請求項5】
請求項1または2に記載の車両用駆動力伝達制御装置であって、
前記車両は、車輪のスリップを抑制した走行を行うグリップ走行モードと、前記車輪のスリップを生じさせるドリフト走行モードとを選択するモード選択スイッチを更に備え、
前記走行状態判定部は、前記グリップ走行モードが前記モード選択スイッチで選択されている走行状態を前記差回転数が予め定めた閾値より小さくなる走行状態と判定し、もしくは前記ドリフト走行モードが前記モード選択スイッチで変速されている走行状態を前記差回転数が予め定めた閾値より大きくなる走行状態と判定する
ことを特徴とする車両用駆動力伝達制御装置。
【請求項6】
請求項1または2に記載の車両用駆動力伝達制御装置であって、
前記車両は、いずれかの車輪がグリップ力を失う可能性の高い悪路を走行するための悪路走行モードを選択するモード選択スイッチを更に備え、
前記走行状態判定部は、前記悪路走行モードが前記モード選択スイッチで選択されている走行状態を前記差回転数が予め定めた閾値より大きくなる走行状態と判定する
ことを特徴とする車両用駆動力伝達制御装置。
発明の詳細な説明
【技術分野】
【0001】
この発明は、駆動力源が出力したトルクを複数の車輪に分配して伝達する駆動力伝達制御装置に関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
前後の四輪を備えた車両では、接地荷重や路面との間の摩擦係数などが車輪ごとに異なる場合があり、またコーナリングの際には旋回半径が内外輪で異なるだけでなく、前後輪で異なる。さらに、四輪駆動車のように前輪と後輪とが機械的に連結されている車両では、前輪と後輪とに駆動力を伝達するとともに、その差動回転を許容する必要があり、さらには前輪もしくは後輪が空転する事態が生じた場合には、いわゆるトルク抜けと称される事態を回避するために、前後輪の差動回転を制限する必要がある。
【0003】
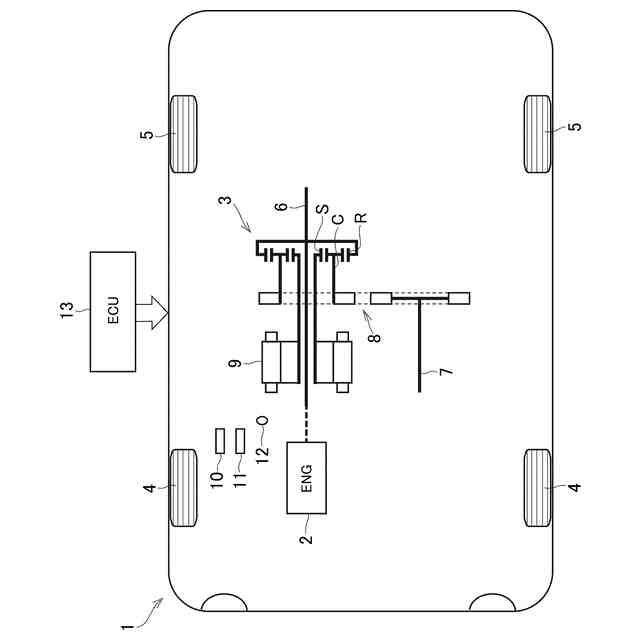
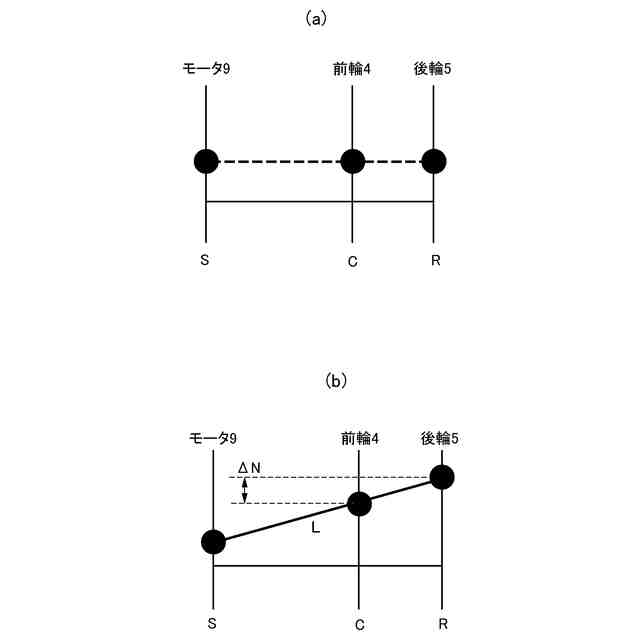
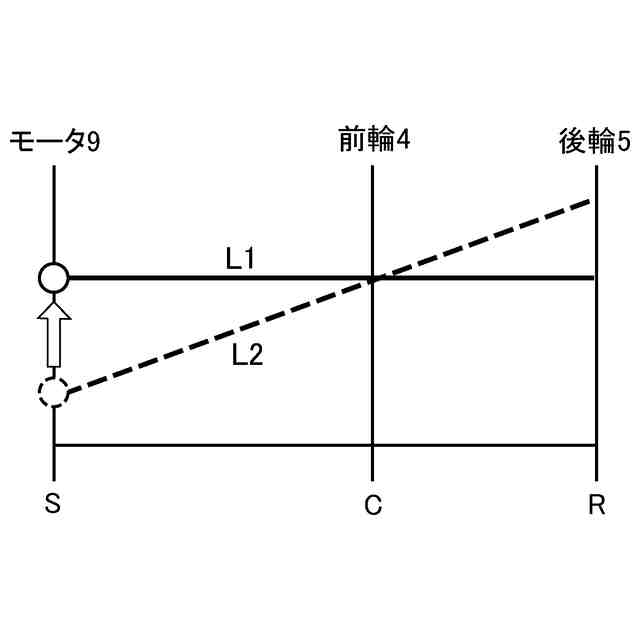
前輪および後輪を駆動できる車両では、上記のように前後輪の差動回転を許容し、また状況に応じて差動回転を制限し、さらにはそれぞれの車輪のトルク分担率を路面の状態もしくは車両の走行状態に応じて制御することが好ましい。特許文献1には、前後輪への駆動力の分配を積極的に制御できるように構成した機構の一例が開示されている。その構成を簡単に説明すると、エンジンから出力されたトルクを前輪側と後輪側とに分配する分配機構は、サンギヤとリングギヤとキャリヤとを回転要素とする遊星歯車機構を主体に構成されており、駆動力を分配する場合には、リングギヤにエンジンからのトルクを入力するとともにリングギヤから後輪側にトルクを出力し、またキャリヤから前輪側にトルクを出力し、その状態でサンギヤのトルクをサンギヤに連結してあるモータもしくはモータ・ジェネレータ(以下、これらをまとめてモータと記す。)によって変化させることにより、前輪および後輪のトルクならびに回転数を制御するように構成されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-131153号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の分配機構によれば、サンギヤに連結されているモータから出力されるトルクによって、前輪側と後輪側とに伝達される動力の配分を制御することが可能になる、とされている。しかしながら、特許文献1には、前後輪の差回転数の制御やそのための駆動力配分の制御については開示されていない。
【0006】
前後輪の差回転数やトルク分担率を適宜に制御できるのであれば、四輪の全てでグリップ力を確保したグリップ走行や、四輪の全てあるいは前後輪のいずれか一方をスリップさせたドリフト走行を任意に行うことができる。しかしながら、グリップ走行の際に前後輪へのトルク(駆動力)の配分が不適切になって前後の差回転数が目標とする差回転数からズレてしまうと、ステア特性がアンダもしくはオーバになるなど走行安定性が損なわれる可能性がある。
【0007】
また、ドリフト走行の場合、前輪と後輪との少なくともいずれか一方をスリップさせるから、そのスリップさせる車輪の回転数が一義的には定まらないことにより、前後輪の差回転数を一義的に定めることができない。そこで、例えば、グリップ走行時の場合と同様に、旋回半径を推定し、その推定した旋回半径から車両の走行軌跡(走行経路)を求め、その走行軌跡を前提として前後輪の目標とする差回転数を設定することが考えられる。しかしながら、推定した旋回半径が実際の走行路とは異なっていれば、車両の挙動がドライバの意図していた挙動とは異なってしまう。また前輪と後輪とのそれぞれに設けてある車輪速センサで検出した回転数に基づいて前後輪の差回転数を求めるとすれば、回転数や差回転数の検出精度あるいは検出応答性の相違が要因となって目標差回転数と実差回転数との差を正確に求めることができず、そのために前後の駆動力配分の制御を好適に行えず、車両の挙動が不安定になる可能性がある。
【0008】
この発明は上記の技術的課題に着目してなされたものであって、グリップ走行やドリフト走行などのいずれの走行の場合であっても車両の挙動安定性を向上させることのできる駆動力伝達制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0009】
この発明は、上記の目的を達成するために、駆動力源が出力したトルクを第1出力側と第2出力側とに分配するとともに前記第1出力側と前記第2出力側との差動回転を行わせる分配機構と、前記第1出力側と前記第2出力側との前記分配機構による差回転数を制御するモータとを備えた車両用駆動力伝達制御装置であって、前記分配機構は、前記駆動力源からトルクが入力されかつ前記第1出力側にトルクを出力する第1回転要素と、前記第2出力側にトルクを出力する第2回転要素と、前記モータが連結された第3回転要素とによって差動作用を行う差動機構から構成され、前記モータを制御するコントローラを更に備え、前記コントローラは、前記差回転数が予め定めた閾値より小さくなる走行状態もしくは大きくなる走行状態か否かを判定する走行状態判定部と、前記差回転数が前記閾値より小さくなる走行状態であることが判定された場合に、前記差回転数と予め定めた目標差回転数との偏差があるか否かを判定する差回転数偏差判定部と、前記偏差があることが前記差回転数偏差判定部で判定された場合に、前記偏差が小さくなるように前記偏差に基づいて前記モータのトルクを制御する第1トルク制御部と、前記差回転数が前記予め定めた閾値以上となる走行状態であることが前記走行状態判定部で判定された場合に、予め定めた目標差回転数と前記差回転数との偏差を少なくする補正トルク値に基づいて、前記第1出力側と前記第2出力側とへの目標駆動力配分比を補正する駆動力配分比補正部と、前記駆動力配分比補正部で補正された目標駆動力配分比に基づいて前記モータのトルクを制御する第2トルク制御部とを備えていることを特徴とするものである。
【0010】
この発明では、前記コントローラは、前記差回転数を前記モータの回転数に基づいて求めるように構成してよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
金型
9日前
トヨタ自動車株式会社
電池
2日前
トヨタ自動車株式会社
電動車
14日前
トヨタ自動車株式会社
電動車
10日前
トヨタ自動車株式会社
ステータ
9日前
トヨタ自動車株式会社
二次電池
9日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
ステータ
9日前
トヨタ自動車株式会社
電池セル
9日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
集合導線
10日前
トヨタ自動車株式会社
ステータ
8日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
蓄電セル
7日前
トヨタ自動車株式会社
蓄電セル
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
正極合材
4日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
ステータ
4日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
制御装置
10日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
制御装置
14日前
トヨタ自動車株式会社
駆動装置
21日前
トヨタ自動車株式会社
電動車両
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ