TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025080438
公報種別
公開特許公報(A)
公開日
2025-05-26
出願番号
2023193582
出願日
2023-11-14
発明の名称
制御装置、制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/633 20240101AFI20250519BHJP(制御;調整)
要約
【課題】歩行者が将来的にどのように移動する特性を有しているのかに基づいて、移動体の経路を適切に生成すること。
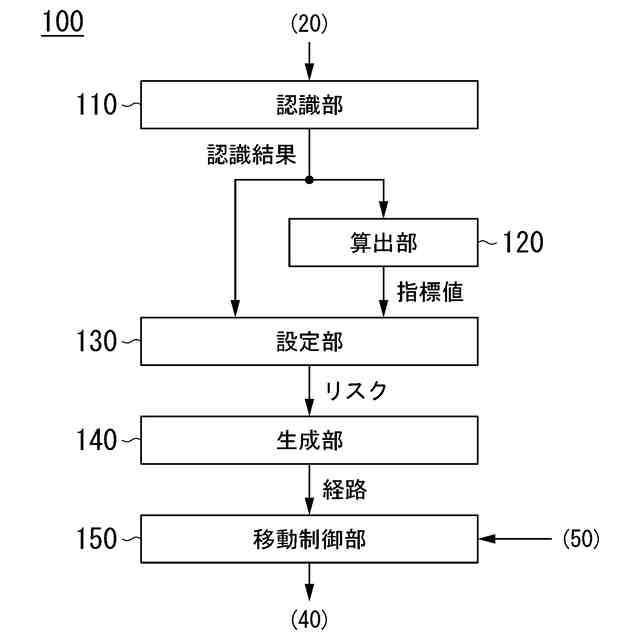
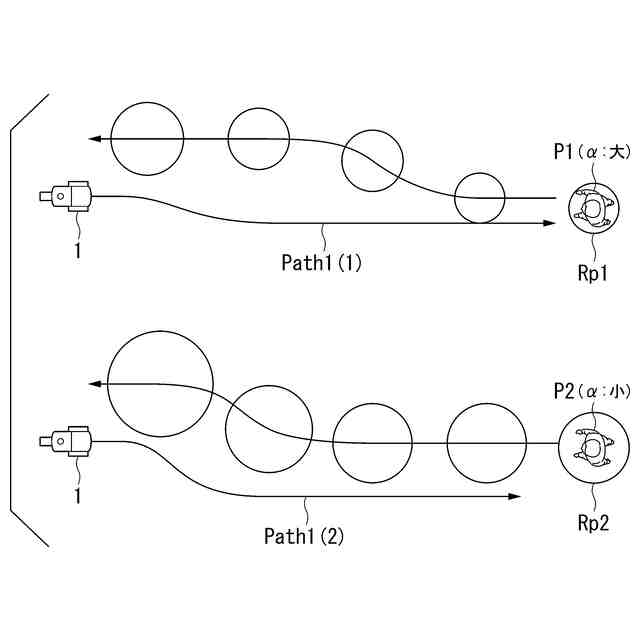
【解決手段】少なくとも一時的に、歩行者が歩行する領域を自律的に移動する移動体を制御する制御装置であって、歩行者の位置を時系列に認識する認識部と、前記認識部の認識結果に基づいて、前記歩行者ごとの協調度合いを示す指標値を算出する算出部と、前記歩行者の周囲にリスク領域を設定する設定部であって、前記指標値が小さいほど前記リスク領域を大きく設定する設定部と、前記リスク領域を回避するように前記移動体が将来進むべき経路を生成する生成部と、を備える制御装置。
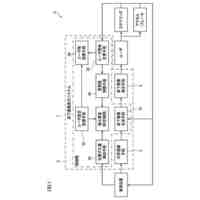
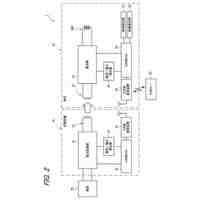
【選択図】図2
特許請求の範囲
【請求項1】
少なくとも一時的に、歩行者が歩行する領域を自律的に移動する移動体を制御する制御装置であって、
歩行者の位置を時系列に認識する認識部と、
前記認識部の認識結果に基づいて、前記歩行者ごとの協調度合いを示す指標値を算出する算出部と、
前記歩行者の周囲にリスク領域を設定する設定部であって、前記指標値が小さいほど前記リスク領域を大きく設定する設定部と、
前記リスク領域を回避するように前記移動体が将来進むべき経路を生成する生成部と、
を備える制御装置。
続きを表示(約 2,000 文字)
【請求項2】
前記算出部は、
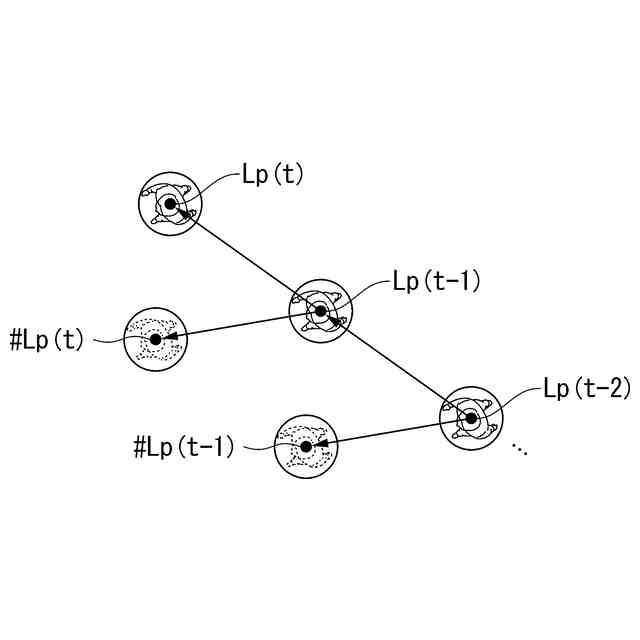
第1時点において、前記第1時点よりも後の第2時点における前記歩行者の位置を予測し、前記第2時点において、認識された前記歩行者の位置と予測された前記歩行者の位置との差分を計算することを、時系列に繰り返し実行し、前記差分を集計した値が大きいほど、前記指標値を大きくする、
請求項1記載の制御装置。
【請求項3】
少なくとも一時的に、歩行者が歩行する領域を自律的に移動する移動体を制御する制御装置であって、
歩行者の位置を時系列に認識する認識部と、
前記認識部の認識結果に基づいて前記歩行者ごとの指標値を算出する算出部と、
前記歩行者の周囲にリスク領域を設定する設定部であって、前記指標値が低いほど前記リスク領域を大きく設定する設定部と、
前記リスク領域を回避するように前記移動体が将来進むべき経路を生成する生成部と、
を備え、
前記算出部は、
第1時点において、前記第1時点よりも後の第2時点における前記歩行者の位置を予測し、前記第2時点において、認識された前記歩行者の位置と予測された前記歩行者の位置との差分を計算することを、時系列に繰り返し実行し、前記差分を集計した値が大きいほど、前記指標値を大きく算出する、
制御装置。
【請求項4】
前記算出部は、前記移動体または他の歩行者に対してすれ違い関係にある歩行者に絞り込んで前記指標値を算出する、
請求項1から3のうちいずれか1項記載の制御装置。
【請求項5】
前記設定部は、前記指標値が算出されなかった歩行者について、前記指標値に代えて、前記指標値のとり得る範囲の上限値付近の値を用いて前記リスク領域を設定する、
請求項4記載の制御装置。
【請求項6】
少なくとも一時的に、歩行者が歩行する領域を自律的に移動する移動体を制御する制御装置が、
歩行者の位置を時系列に認識することと、
前記認識の結果に基づいて、前記歩行者ごとの協調度合いを示す指標値を算出することと、
前記歩行者の周囲に、前記指標値が小さいほど大きくなるようにリスク領域を大きく設定することと、
前記リスク領域を回避するように前記移動体が将来進むべき経路を生成することと、
を実行する制御方法。
【請求項7】
少なくとも一時的に、歩行者が歩行する領域を自律的に移動する移動体を制御する制御装置が、
歩行者の位置を時系列に認識することと、
前記認識の結果に基づいて前記歩行者ごとの指標値を算出することと、
前記歩行者の周囲に、前記指標値が低いほど大きくなるようにリスク領域を設定することと、
前記リスク領域を回避するように前記移動体が将来進むべき経路を生成することと、
を実行し、
前記算出することは、
第1時点において、前記第1時点よりも後の第2時点における前記歩行者の位置を予測し、前記第2時点において、認識された前記歩行者の位置と予測された前記歩行者の位置との差分を計算することを、時系列に繰り返し実行し、前記差分を集計した値が大きいほど、前記指標値を大きく算出することを含む、
制御方法。
【請求項8】
少なくとも一時的に、歩行者が歩行する領域を自律的に移動する移動体を制御する制御装置のプロセッサに、
歩行者の位置を時系列に認識することと、
前記認識の結果に基づいて、前記歩行者ごとの協調度合いを示す指標値を算出することと、
前記歩行者の周囲に、前記指標値が小さいほど大きくなるようにリスク領域を大きく設定することと、
前記リスク領域を回避するように前記移動体が将来進むべき経路を生成することと、
を実行させるためのプログラム。
【請求項9】
少なくとも一時的に、歩行者が歩行する領域を自律的に移動する移動体を制御する制御装置のプロセッサに、
歩行者の位置を時系列に認識することと、
前記認識の結果に基づいて前記歩行者ごとの指標値を算出することと、
前記歩行者の周囲に、前記指標値が低いほど大きくなるようにリスク領域を設定することと、
前記リスク領域を回避するように前記移動体が将来進むべき経路を生成することと、
を実行させるためのプログラムであって、
前記算出することは、
第1時点において、前記第1時点よりも後の第2時点における前記歩行者の位置を予測し、前記第2時点において、認識された前記歩行者の位置と予測された前記歩行者の位置との差分を計算することを、時系列に繰り返し実行し、前記差分を集計した値が大きいほど、前記指標値を大きく算出することを含む、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御方法、およびプログラム
に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
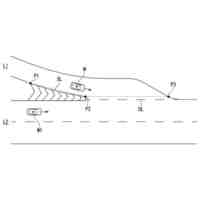
近年、歩行者と同じ空間を移動可能な移動体について研究および実用化が進められている。この種の移動体は、歩行者などの障害物に過度に接近しないように経路を生成して自律的に移動する。これに関連し、移動体の接近による歩行者の反応を検知し、検知された歩行者の反応に応じて進入不可領域(パーソナルスペース)を拡大又は縮小する装置の発明が開示されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2009-157735号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術では、歩行者が立ち止まったり、上体が鋭く動いたりする等の、予め数値化された所定の反応をした場合にパーソナルスペースを拡大している。しかしながら、このような処理では、歩行者が将来的にどのように移動する特性を有しているのかに基づいて、移動体の経路を適切に生成することができない場合があった。
【0005】
本発明は、このような事情を考慮してなされたものであり、歩行者が将来的にどのように移動する特性を有しているのかに基づいて、移動体の経路を適切に生成することができる制御装置、制御方法、およびプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る制御装置、制御方法、およびプログラムは、以下の構成を採用した。
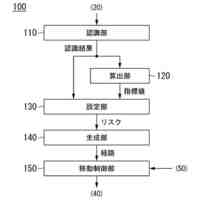
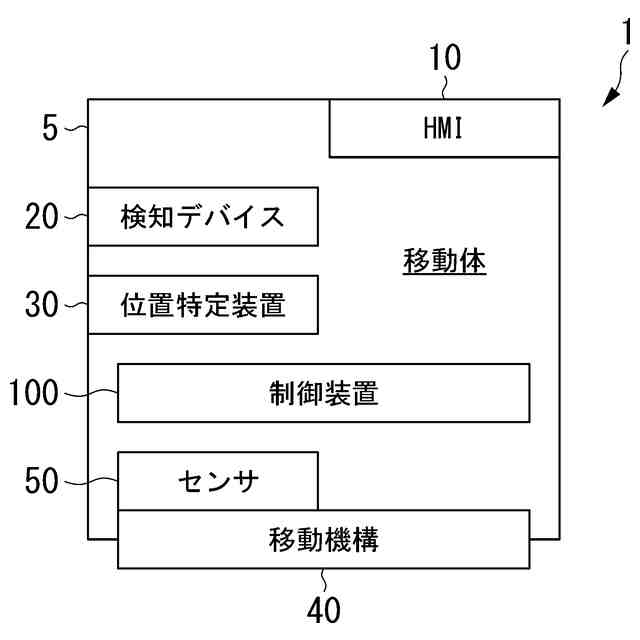
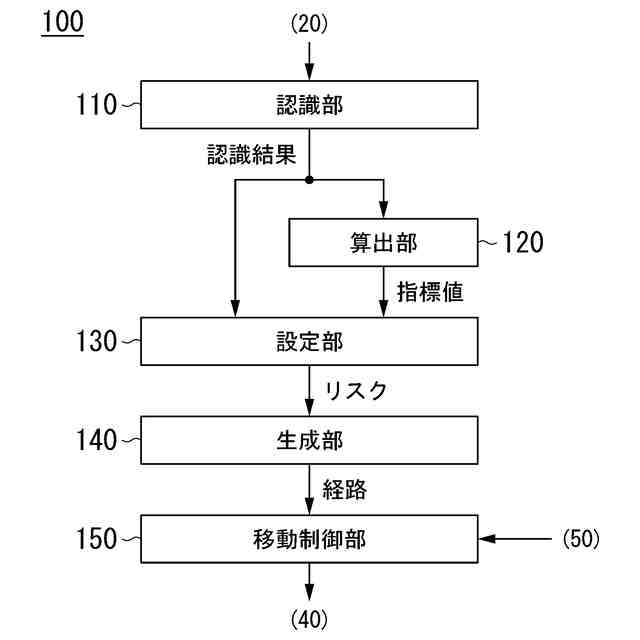
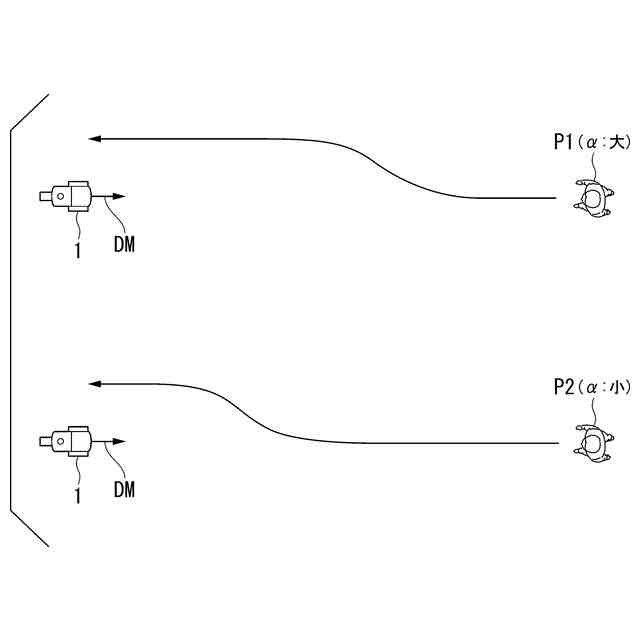
(1):この発明の一態様に係る制御装置は、少なくとも一時的に、歩行者が歩行する領域を自律的に移動する移動体を制御する制御装置であって、歩行者の位置を時系列に認識する認識部と、前記認識部の認識結果に基づいて、前記歩行者ごとの協調度合いを示す指標値を算出する算出部と、前記歩行者の周囲にリスク領域を設定する設定部であって、前記指標値が小さいほど前記リスク領域を大きく設定する設定部と、前記リスク領域を回避するように前記移動体が将来進むべき経路を生成する生成部と、を備えるものである。
【0007】
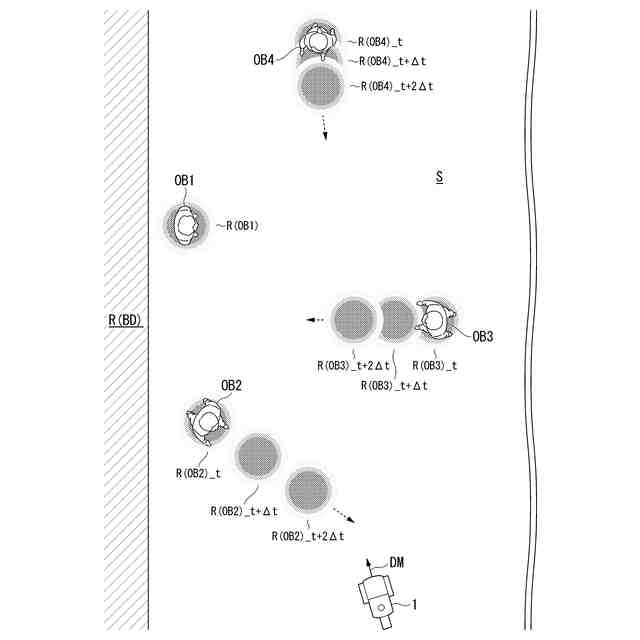
(2):上記(1)の態様において、前記算出部は、第1時点において、前記第1時点よりも後の第2時点における前記歩行者の位置を予測し、前記第2時点において、認識された前記歩行者の位置と予測された前記歩行者の位置との差分を計算することを、時系列に繰り返し実行し、前記差分を集計した値が大きいほど、前記指標値を大きくするものである。
【0008】
(3):本発明の他の態様に係る制御装置は、少なくとも一時的に、歩行者が歩行する領域を自律的に移動する移動体を制御する制御装置であって、歩行者の位置を時系列に認識する認識部と、前記認識部の認識結果に基づいて前記歩行者ごとの指標値を算出する算出部と、前記歩行者の周囲にリスク領域を設定する設定部であって、前記指標値が低いほど前記リスク領域を大きく設定する設定部と、前記リスク領域を回避するように前記移動体が将来進むべき経路を生成する生成部と、を備え、前記算出部は、第1時点において、前記第1時点よりも後の第2時点における前記歩行者の位置を予測し、前記第2時点において、認識された前記歩行者の位置と予測された前記歩行者の位置との差分を計算することを、時系列に繰り返し実行し、前記差分を集計した値が大きいほど、前記指標値を大きく算出するものである。
【0009】
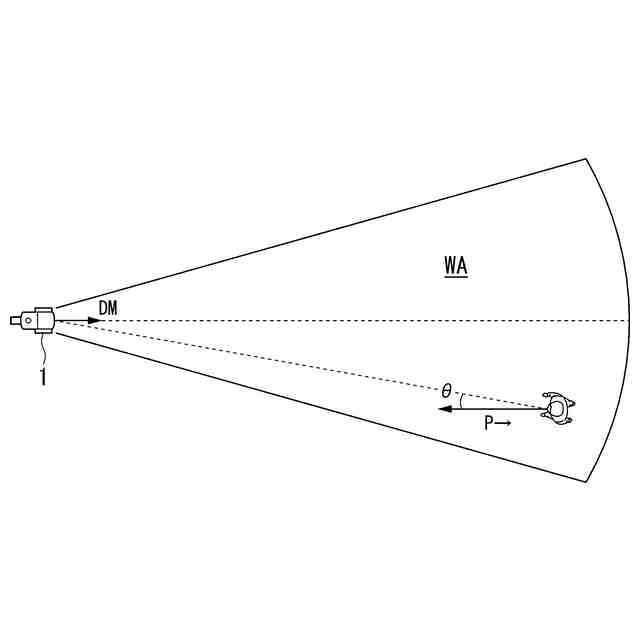
(4):上記(1)から(3)のいずれかの態様において、前記算出部は、前記移動体または他の歩行者に対してすれ違い関係にある歩行者に絞り込んで前記指標値を算出するものである。
【0010】
(5):上記(4)の態様において、前記設定部は、前記指標値が算出されなかった歩行者について、前記指標値に代えて、前記指標値のとり得る範囲の上限値付近の値を用いて前記リスク領域を設定するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
航空機
5日前
本田技研工業株式会社
電動車両
12日前
本田技研工業株式会社
電動車両
12日前
本田技研工業株式会社
回転電機
5日前
本田技研工業株式会社
車載検出器
6日前
本田技研工業株式会社
鞍乗り型車両
9日前
本田技研工業株式会社
バッテリパック
3日前
本田技研工業株式会社
バッテリパック
3日前
本田技研工業株式会社
バッテリパック
3日前
本田技研工業株式会社
バッテリパック
3日前
本田技研工業株式会社
電池劣化推定装置
2日前
本田技研工業株式会社
セル電圧検出装置
3日前
本田技研工業株式会社
鞍乗り型電動車両
12日前
本田技研工業株式会社
ステアリング装置
10日前
本田技研工業株式会社
被遮蔽物視認化装置
11日前
本田技研工業株式会社
床下画像表示システム
9日前
本田技研工業株式会社
バッテリケース及び車両
16日前
本田技研工業株式会社
光信号切替えモジュール
6日前
本田技研工業株式会社
バッテリパックの車載構造
3日前
本田技研工業株式会社
押圧装置および押圧システム
13日前
本田技研工業株式会社
駐車制御装置及び駐車制御方法
9日前
本田技研工業株式会社
制御装置及び燃料電池システム
6日前
株式会社アイシン
運転支援装置
12日前
本田技研工業株式会社
三次元造形装置及び鋳型造形方法
17日前
本田技研工業株式会社
バッテリパック及びバッテリ組立体
3日前
本田技研工業株式会社
非接触電力伝送システムの制御装置
9日前
本田技研工業株式会社
位置推定装置および車両制御システム
12日前
本田技研工業株式会社
制御装置、制御方法、およびプログラム
13日前
本田技研工業株式会社
制御システム、制御方法、およびプログラム
17日前
本田技研工業株式会社
運転支援装置、情報処理方法、及びプログラム
10日前
本田技研工業株式会社
電池モジュール及び電池モジュールの組立方法
3日前
本田技研工業株式会社
移動体制御装置、移動体制御方法、及びプログラム
18日前
本田技研工業株式会社
移動体の制御装置、移動体の制御方法、およびプログラム
12日前
本田技研工業株式会社
手指形状推定装置、手指形状推定方法、およびプログラム。
3日前
本田技研工業株式会社
機器管理システム、管理装置、通信機器、および機器管理方法
5日前
エイブリック株式会社
基準電圧回路
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ