TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085388
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199232
出願日
2023-11-24
発明の名称
手指形状推定装置、手指形状推定方法、およびプログラム。
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250529BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】人が物体をどの様にさわるかをモバイル性向上させかつ精度よく推定することができる手指形状推定装置、手指形状推定方法、およびプログラムを提供することを目的とする。
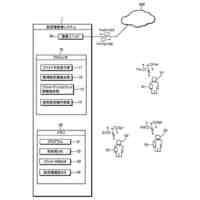
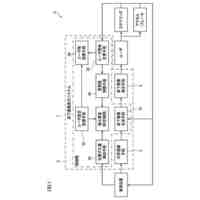
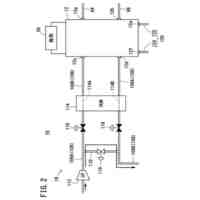
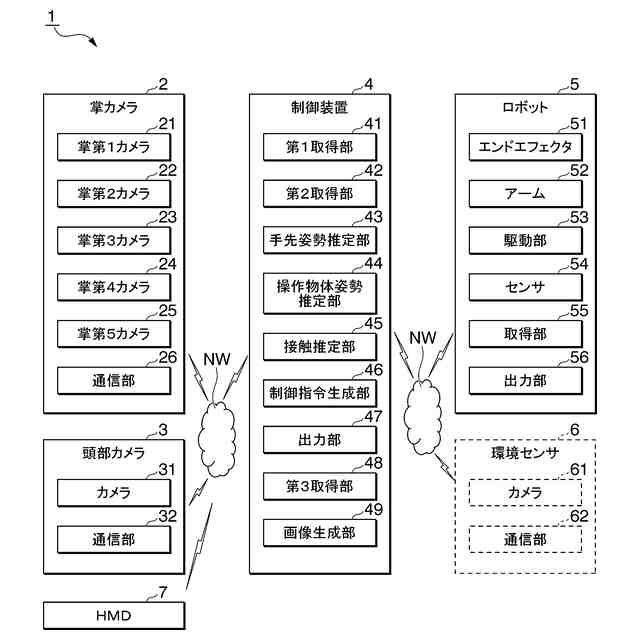
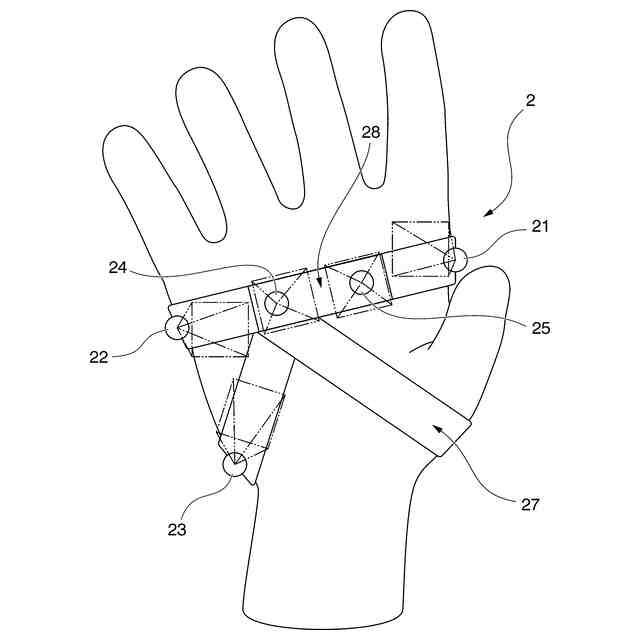
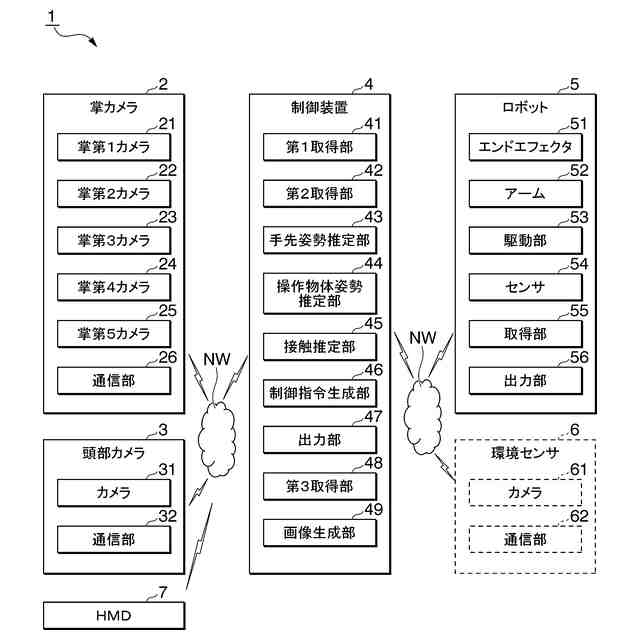
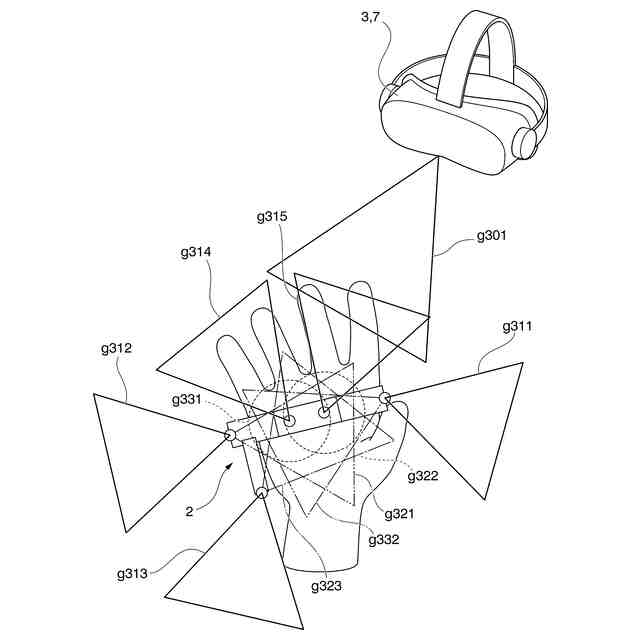
【解決手段】手指形状推定装置は、操作者の手指の撮影画像を用いて、操作者の手指形状を推定する装置であって、操作者の指の形状の画像を、指の腹側から取得する手指撮影部と、取得した画像を解析して、操作者の手の姿勢を推定する手姿勢推定部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
操作者の手指の撮影画像を用いて、前記操作者の手指形状を推定する装置であって、
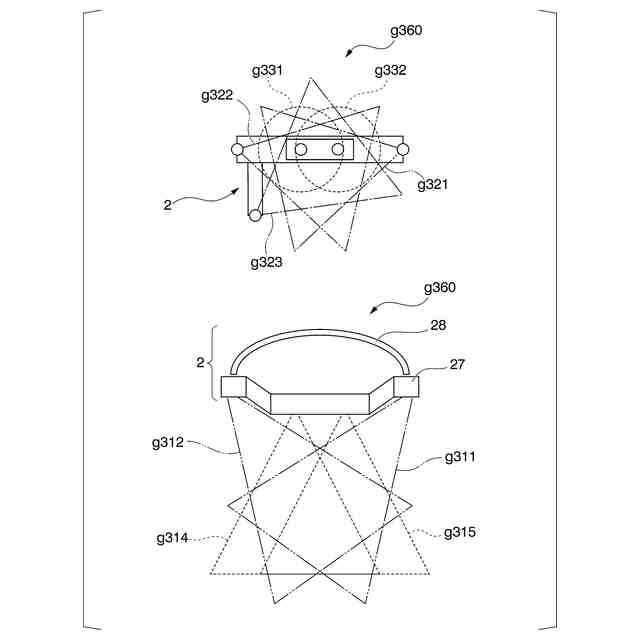
前記操作者の指の形状の画像を、指の腹側から取得する手指撮影部と、
取得した画像を解析して、前記操作者の手の姿勢を推定する手姿勢推定部と、
を備える手指形状推定装置。
続きを表示(約 1,100 文字)
【請求項2】
前記操作者の推定した手の姿勢から、ロボットへの操作指令値を生成する制御指令生成部、
をさらに備える請求項1に記載の手指形状推定装置。
【請求項3】
前記操作者の手が操作する操作物体の画像を撮影する操作物体撮影部と、
操作物体の画像から操作物体の姿勢を推定する操作物体姿勢推定部と、
推定した操作物体姿勢と手の姿勢から操作物体と手の接触点と法線を推定する接触推定部と、
をさらに備える請求項1に記載の手指形状推定装置。
【請求項4】
前記手指撮影部は、
前記操作者の掌側面から指の腹側を撮影する方向に設置される、
請求項1に記載の手指形状推定装置。
【請求項5】
前記手指撮影部は、複数の撮影部を備え、
第1の前記手指撮影部は、前記操作者の人差し指側掌側面から指の内側を撮影する方向に設置され、
第2の前記手指撮影部は、前記操作者の小指側掌側面から指の内側を撮影する方向に設置される、
請求項1に記載の手指形状推定装置。
【請求項6】
前記手指撮影部は、
前記操作者の小指球付近から親指を撮影する方向に向いて設置される、
請求項1に記載の手指形状推定装置。
【請求項7】
前記操作物体撮影部は、視差画像を生成する視差画像撮影カメラであり、
前記手姿勢推定部は、
掌から手の甲側ではない方向に向かって撮影し、前記操作物体撮影部で撮影した画像と、
手指撮影部で取得した画像から手の姿勢を推定する、
請求項3に記載の手指形状推定装置。
【請求項8】
前記操作者の手の形状の画像を、前記操作者の掌の上部から取得する撮影部、をさらに備え、
前記手姿勢推定部は、前記撮影部と手指撮影部それぞれが取得した画像を解析して、前記操作者の手の姿勢を推定する、
請求項1に記載の手指形状推定装置。
【請求項9】
操作者の手指の撮影画像を用いて、前記操作者の手指形状を推定する方法であって、
手指撮影部が、前記操作者の指の形状の画像を、指の腹側から取得し、
手姿勢推定部が、取得した画像を解析して、前記操作者の手の姿勢を推定する、
手指形状推定方法。
【請求項10】
操作者の手指の撮影画像を用いて、前記操作者の手指形状を推定する装置のコンピュータに、
前記操作者の指の形状の画像を、指の腹側から取得させ、
手姿勢推定部が、取得した画像を解析して、前記操作者の手の姿勢を推定させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、手指形状推定装置、手指形状推定方法、およびプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
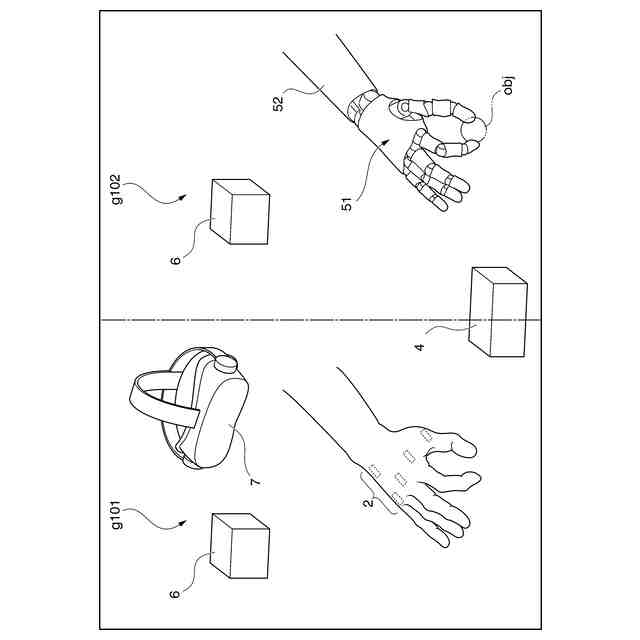
近年、ロボット等の遠隔操作への期待が高まっている。ロボットを遠隔操作させる場合は、例えば、ロボットの頭部にカメラを搭載し、そのカメラの画像を基に操作者がデータグローブ等で操作指示を行ってロボットを遠隔操作する。このような遠隔操作においては、操作者の指先の形状や位置、ロボットの手先の位置が重要である。このため、手指の形状を推定したり、操作対象物と指先の接触位置の推定等に関する開発が行われている。
【0003】
例えば、特許文献1に記載の技術では、カメラを手の甲側に装着して、母指と示指のあいだの前方斜め上から手の甲を撮像し、母指、示指、中指の屈曲伸展を推定する。
また、例えば。インターネットから人が物体に触る個所をデータベース化し、対象物との接触の有無を推定する技術が提案されている(例えば、非特許文献1参照)。
また、光量が調整された実験室を設置し、その実験室内で作業者の手を取り囲むように8個のカメラを設置して、作業者の手先を推定する技術が提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2015-100697号公報
【非特許文献】
【0005】
Shikhar Bahl, Russell Mendonca, et al., “Affordances from Human Videos as a Versatile Representation for Robotics”, CVPR 2023, 2023
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、非特許文献1に記載の技術では、物体と指との接触の有無が推定できても、各指の対象物との接触位置がわからなかった。また、特許文献1に記載の技術では、指を曲げた時など、指先が隠れて撮影できない場合もあった。また、実験室内で多数のカメラで撮影する従来技術では、手先や物体がさえぎられることを低減できても、測定環境が大きいため持ち運びができなかった。
【0007】
本発明は、上記の問題点に鑑みてなされたものであって、人が物体をどの様にさわるかをモバイル性向上させかつ精度よく推定することができる手指形状推定装置、手指形状推定方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
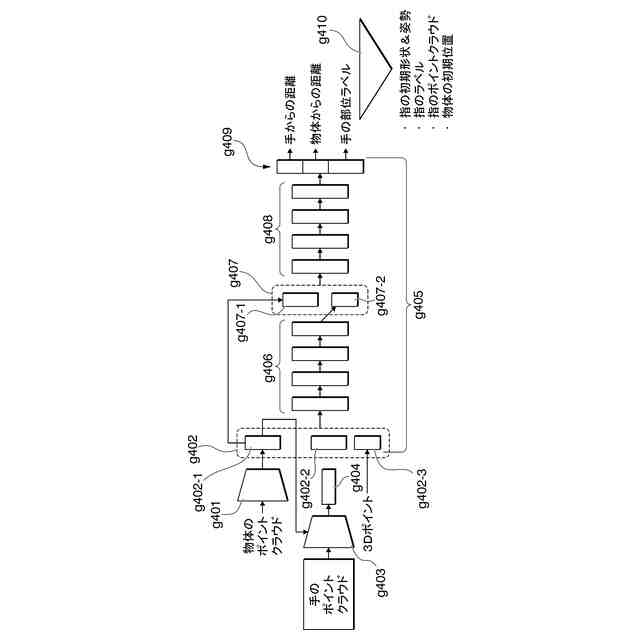
(1)上記目的を達成するため、本発明の一態様に係る手指形状推定装置は、操作者の手指の撮影画像を用いて、前記操作者の手指形状を推定する装置であって、前記操作者の指の形状の画像を、指の腹側から取得する手指撮影部と、取得した画像を解析して、前記操作者の手の姿勢を推定する手姿勢推定部と、を備える手指形状推定装置である。
【0009】
(2)(1)の本発明の一態様に係る手指形状推定装置において、前記操作者の推定した手の姿勢から、ロボットへの操作指令値を生成する制御指令生成部、をさらに備えるようにしてもよい。
【0010】
(3)(1)の本発明の一態様に係る手指形状推定装置において、前記操作者の手が操作する操作物体の画像を撮影する操作物体撮影部と、操作物体の画像から操作物体の姿勢を推定する操作物体姿勢推定部と、推定した操作物体姿勢と手の姿勢から操作物体と手の接触点と法線を推定する接触推定部と、をさらに備えるようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
航空機
4日前
本田技研工業株式会社
保護部材
29日前
本田技研工業株式会社
内燃機関
23日前
本田技研工業株式会社
電動車両
11日前
本田技研工業株式会社
電動車両
11日前
本田技研工業株式会社
回転電機
4日前
本田技研工業株式会社
車載検出器
5日前
本田技研工業株式会社
鞍乗り型車両
25日前
本田技研工業株式会社
蓄電システム
26日前
本田技研工業株式会社
鞍乗り型車両
8日前
本田技研工業株式会社
電源システム
29日前
本田技研工業株式会社
電源システム
29日前
本田技研工業株式会社
バッテリパック
2日前
本田技研工業株式会社
バッテリパック
2日前
本田技研工業株式会社
バッテリパック
2日前
本田技研工業株式会社
バッテリパック
2日前
本田技研工業株式会社
車両の制御装置
19日前
本田技研工業株式会社
鞍乗り型電動車両
11日前
本田技研工業株式会社
ステアリング装置
9日前
本田技研工業株式会社
電池劣化推定装置
1日前
本田技研工業株式会社
ステアリング装置
19日前
本田技研工業株式会社
セル電圧検出装置
2日前
本田技研工業株式会社
被遮蔽物視認化装置
10日前
本田技研工業株式会社
航空機管理システム
23日前
本田技研工業株式会社
静電アクチュエータ
19日前
本田技研工業株式会社
物体センサの取付構造
24日前
本田技研工業株式会社
移動サポートシステム
24日前
本田技研工業株式会社
床下画像表示システム
8日前
本田技研工業株式会社
光信号切替えモジュール
5日前
本田技研工業株式会社
バッテリケース及び車両
15日前
本田技研工業株式会社
バッテリパックの車載構造
2日前
本田技研工業株式会社
押圧装置および押圧システム
12日前
本田技研工業株式会社
駐車制御装置及び駐車制御方法
8日前
本田技研工業株式会社
制御装置及び燃料電池システム
5日前
本田技研工業株式会社
運転支援装置および運転支援方法
18日前
本田技研工業株式会社
三次元造形装置及び鋳型造形方法
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ