TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025088735
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2024201223
出願日
2024-11-19
発明の名称
自律車両の経路変動
出願人
ウェイモ エルエルシー
代理人
個人
,
個人
主分類
G01C
21/34 20060101AFI20250604BHJP(測定;試験)
要約
【課題】自律車両のための経路変動を提供する。
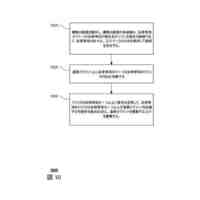
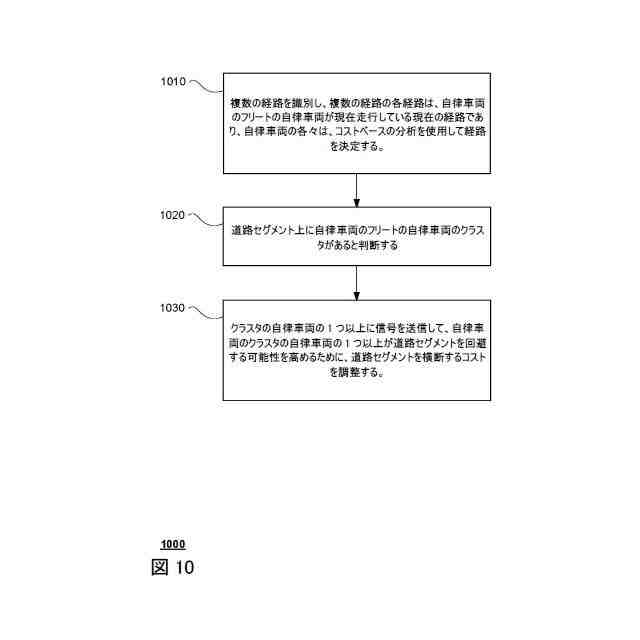
【解決手段】例えば、複数の経路が、識別され得る。複数の経路の各経路は、自律車両のフリートの自律車両が現在走行している、現在の経路であり得る。自律車両の各々は、コストベースの分析を使用して、経路を決定し得る。道路セグメント上に自律車両のフリートの自律車両のクラスタがあることが、決定され得る。信号は、自律車両のクラスタの自律車両の1つ以上に、自律車両のクラスタの自律車両の1つ以上が、道路セグメントを回避する可能性を高めるために、道路セグメントを横断するコストを調整する信号が送信され得る。
【選択図】図10
特許請求の範囲
【請求項1】
方法であって、
1つ以上のサーバコンピューティングデバイスの1つ以上のプロセッサによって、複数の経路を識別することであって、前記複数の経路の各経路が、自律車両のフリートの自律車両が現在走行している現在の経路であり、前記自律車両の各々が、コストベースの分析を使用して経路を決定することと、
前記1つ以上のプロセッサによって、前記自律車両の前記フリートの自律車両のクラスタが、道路セグメント上で発生する可能性が高いと決定することと、
前記1つ以上のプロセッサによって、前記自律車両の前記クラスタの前記自律車両の前記1つ以上が、前記道路セグメントを回避する可能性を高めるために、前記道路セグメントを横断するコストを調整する信号を、前記自律車両の前記クラスタの前記自律車両の1つ以上に送信することと、
を含む、方法。
続きを表示(約 960 文字)
【請求項2】
前記複数の経路の各経路が、各々が異なる道路セグメントに対応する、マップ情報のエッジのリストを含む、請求項1に記載の方法。
【請求項3】
前記自律車両の前記クラスタが発生する可能性が高いと決定することが、時間スライディングウィンドウに基づく、請求項1に記載の方法。
【請求項4】
前記自律車両の前記クラスタが発生する可能性が高いと決定することが、前記時間スライディングウィンドウ中に前記道路セグメントを横断することが予想される、自律車両の閾値数に基づく、請求項3に記載の方法。
【請求項5】
前記道路セグメントのタイプに基づいて、前記自律車両の前記閾値数を決定することを更に含む、請求項4に記載の方法。
【請求項6】
前記道路セグメントのタイプに基づいて、前記時間スライディングウィンドウを決定することを更に含む、請求項3に記載の方法。
【請求項7】
前記信号を送信することが、前記自律車両の前記クラスタの前記自律車両の前記1つ以上が、乗客を輸送しているかどうかに基づく、請求項1に記載の方法。
【請求項8】
前記信号を送信することが、前記自律車両の前記クラスタの前記自律車両の前記1つ以上の、充電状態、又は燃料状態に基づく、請求項1に記載の方法。
【請求項9】
前記信号が、第一の信号であり、前記方法が、更に、前記自律車両の前記クラスタの前記自律車両の前記1つ以上の第二のものに第二の信号を送信して、前記道路セグメントを横断する前記コストを調整することを含み、前記第一の信号が、前記コストの第一の調整を引き起こすように構成され、前記第二の信号が、前記コストの第二の調整を引き起こすように構成され、前記第一の調整が、前記第二の調整とは異なる、請求項1に記載の方法。
【請求項10】
前記自律車両の前記クラスタの前記自律車両の前記1つ以上が、前記道路セグメントを含まない1つ以上の新しい経路に変化するまで、前記自律車両の前記クラスタの前記自律車両の前記1つ以上に、追加信号を送信し続けることを更に含む、請求項1に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
関連出願の相互参照
続きを表示(約 3,800 文字)
【0002】
本出願は、2023年11月30日に出願された、米国仮特許出願第63/604,298号の出願日の利益を主張するものであり、その開示全体は参照により本明細書に組み込まれる。
【背景技術】
【0003】
例えば、自律車両、例えば、人間の運転者を必要としない場合がある車両は、ある場所から別の場所への、乗客、又は品目の輸送を支援するために使用され得る。こうした車両は、完全に自律的なモードで動作してもよく、乗客は、ピックアップ位置、又は目的地位置などの、何らかの初期入力を提供してもよく、自律車両は、その位置にそれ自体を操作する。自律車両は、周囲の物体を検出するために、様々なタイプのセンサを装備している。例えば、自律車両は、ソナー、レーダー、カメラ、Lidar、及び自律車両の周囲に関するデータをスキャン、生成、及び/又は記録する他のデバイスを含み得る。センサデータは、自律車両が、経路に沿って周囲を通って、それ自体を操作するために、軌道をプランニングすることを可能にするために、事前に保存されたマップ情報と組み合わされ得る。
【0004】
しかしながら、自律車両のフリートが共通のマップを使用して特定のサービスエリアで動作する場合、このような自律車両は、自律車両に同一の道路、又は道路の一部を運転させる、同一の、又は類似の経路を使用し得る可能性が高い。これは、特定の道路の過剰使用、及び潜在的渋滞をもたらし得る。これはまた、複数の自律車両が1つの一般的な場所(例えば、空港、コンサート、スポーツ、又はその他のイベントの場合)へ、又はそこから移動している状況でも生じ得る。いくつかの事例では、自律車両が特定の道路にストランド状になる場合、他の自律車両もこのような道路を使用する場合、それらはまた、ストランド状になり、更に大きな渋滞の懸念を引き起こす場合がある。
【発明の概要】
【0005】
本開示の態様は、方法を提供する。方法は、1つ以上のサーバコンピューティングデバイスの、1つ以上のプロセッサによって、複数の経路を識別することであって、複数の各経路は、自律車両のフリートの自律車両が現在走行している現在の経路であり、自律車両の各々は、コストベースの分析を使用することと、1つ以上のプロセッサによって、道路セグメント上に自律車両のフリートの自律車両のクラスタが発生する可能性が高いと決定することと、1つ以上のプロセッサによって、自律車両のクラスタの自律車両の1つ以上に信号を送信することであって、信号は、道路セグメントを回避する自律車両のクラスタの自律車両の1つ以上の可能性を高めるために、道路セグメントを横断するコストを調整する信号であることとを含む。
【0006】
一実施例では、複数の経路の各経路は、各々が異なる道路セグメントに対応する、マップ情報のエッジのリストを含む。別の実施例では、自律車両のクラスタが発生する可能性が高いと決定することは、時間スライディングウィンドウに基づく。この実施例では、自律車両のクラスタが発生する可能性が高いと決定することは、時間スライディングウィンドウ内に道路セグメントを横断することが予想される、自律車両の閾値数に基づく。加えて、又は別の方法として、方法はまた、道路セグメントのタイプに基づいて、自律車両ウィンドウの閾値数を決定することを含む。加えて、又は別の方法として、方法はまた、道路セグメントのタイプに基づいて、スライディングウィンドウを決定することを含む。別の実施例では、信号を送信することは、自律車両のクラスタの自律車両の1つ以上が乗客を輸送しているかどうかに基づく。別の実施例では、信号を送信することは、自律車両のクラスタの自律車両の1つ以上の、充電状態、又は燃料状態に基づく。別の実施例では、信号は、第一の信号であり、方法は、更に、第二の信号を、自律車両のクラスタの自律車両の1つ以上に送信して、道路セグメントを横断するコストを調整することを含み、第一の信号は、コストの第一の調整を引き起こすように構成され、第二の信号は、コストの第二の調整を引き起こすように構成され、第一の調整は、第二の調整とは異なる。別の実施例では、方法はまた、自律車両のクラスタの自律車両の1つ以上が道路セグメントを含まない1つ以上の新しい経路に変化するまで、自律車両のクラスタの自律車両の1つ以上に、追加信号を送信し続けることを含む。この実施例では、方法はまた、自律車両のクラスタの自律車両の1つ以上の、道路セグメントのコストの閾値の、最大値への調整を制限することを含む。別の実施例では、信号は、コストを調整する期間を示す命令を含む。
【0007】
本開示の別の態様は、システムを提供する。システムは、1つ以上のプロセッサを含み、プロセッサは、複数の経路を識別することであって、複数の各経路は、自律車両のフリートの自律車両が現在走行している現在の経路であり、自律車両の各々は、コストベースの分析を使用する経路を決定することと、道路セグメント上に自律車両のフリートの自律車両のクラスタが発生する可能性が高いと決定することと、自律車両のクラスタの自律車両の1つ以上に信号を送信することであって、信号は、道路セグメントを回避する自律車両のクラスタの自律車両の1つ以上の可能性を高めるために、道路セグメントを横断するコストを調整する信号であることとを行うように、構成される。
【0008】
一実施例では、1つ以上のプロセッサは、更に、時間スライディングウィンドウに基づいて、自律車両のクラスタが発生する可能性が高いと決定するように構成される。この実施例では、1つ以上のプロセッサは、更に、時間スライディングウィンドウ中に道路セグメントを横断することが予想される、自律車両の閾値数に基づいて、自律車両のクラスタが発生する可能性が高いと決定するように構成される。加えて、又は別の方法として、1つ以上のプロセッサは、更に、道路セグメントのタイプに基づいて、スライディングウィンドウを決定するように構成される。別の実施例では、信号が、第一の信号であり、1つ以上のプロセッサは、更に、自律車両のクラスタの自律車両の1つ以上の第二のものに第二の信号に送信して、セグメントを横断するコストを調整するように構成され、第一の信号は、コストの第一の調整を引き起こすように構成され、第二の信号は、コストの第二の調整を引き起こすように構成され、第一の調整は、第二の調整とは異なる。別の実施例では、1つ以上のプロセッサは、自律車両のクラスタの1つ以上の自律車両が道路セグメントを含まない1つ以上の新しい経路に変化するまで、自律車両のクラスタの自律車両の1つ以上に、追加信号送信し続けるように構成される。別の実施例では、信号は、コストを調整する期間を示す命令を含む。別の実施例では、システムは自律車両も含む。
【図面の簡単な説明】
【0009】
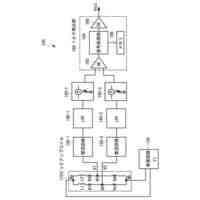
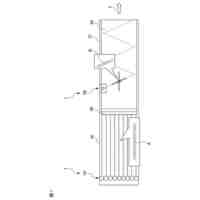
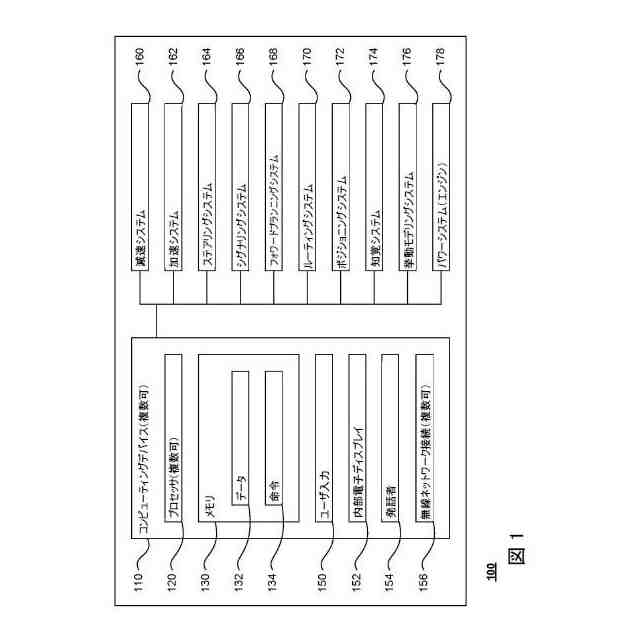
図1は、例示的実施形態に従う、例示的車両の機能図である。
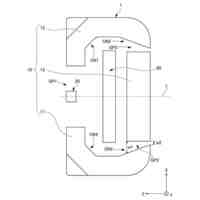
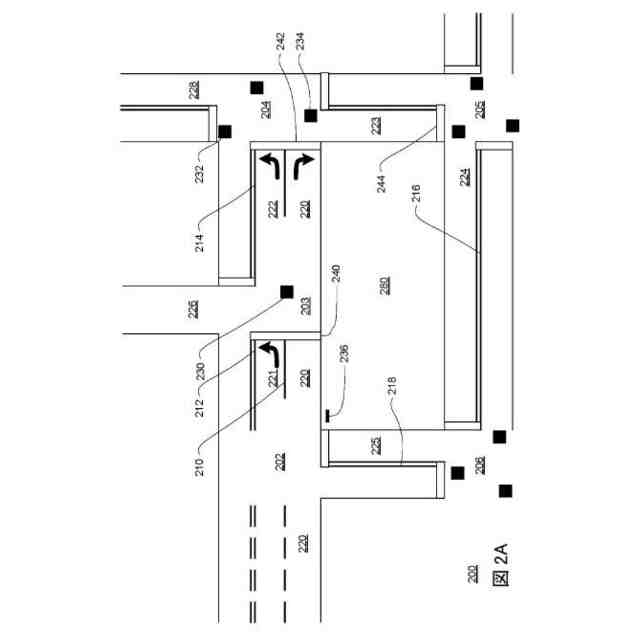
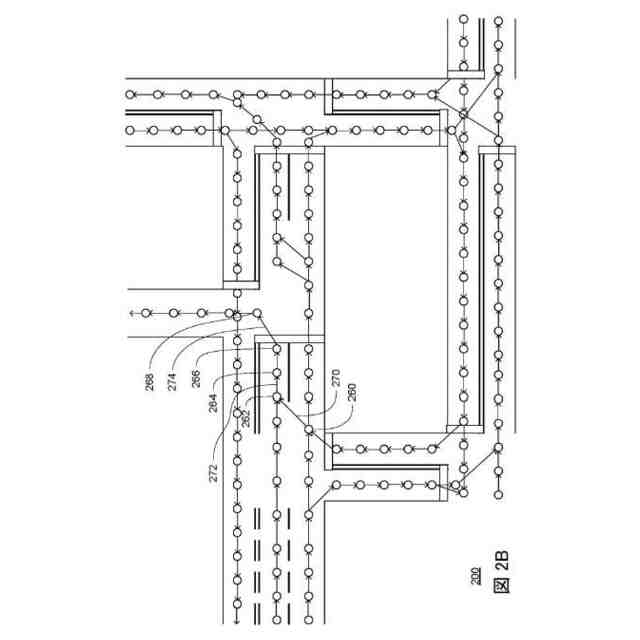
図2A~2Bは、本開示の態様による、マップ情報の実施例である。
図2A~2Bは、本開示の態様による、マップ情報の実施例である。
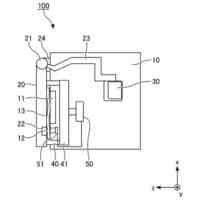
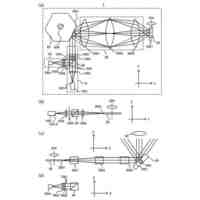
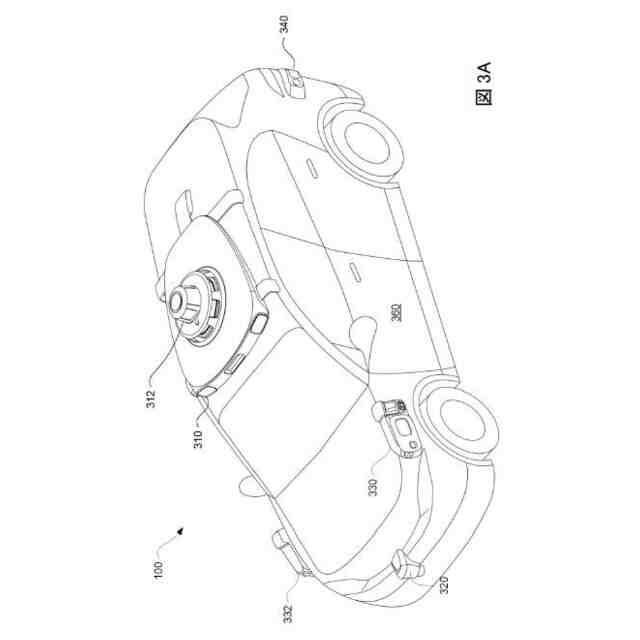
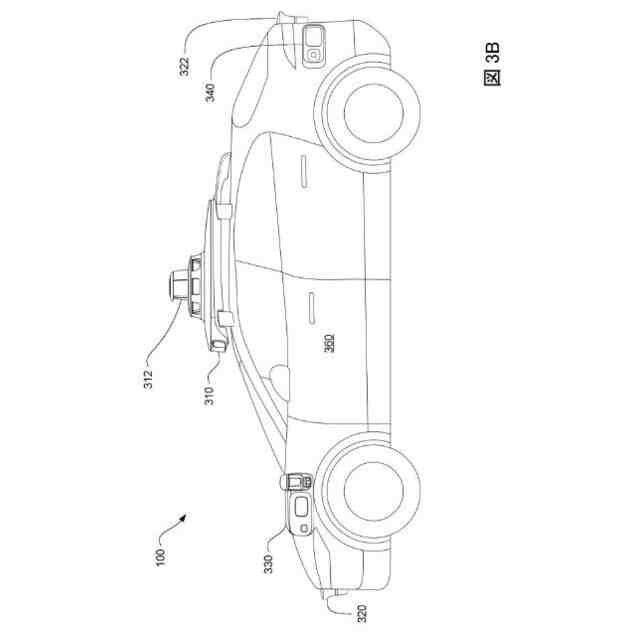
図3A~3Bは、本開示の態様による、車両の例示的な外部図である。
図3A~3Bは、本開示の態様による、車両の例示的な外部図である。
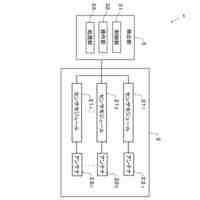
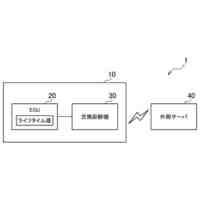
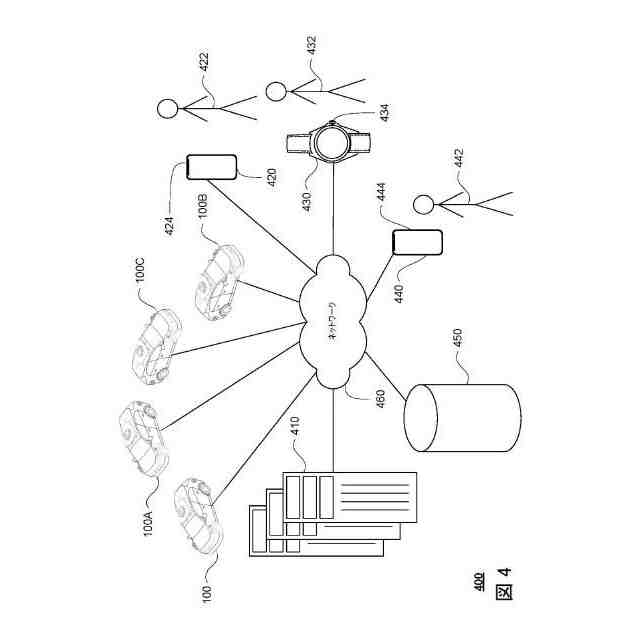
図4は、本開示の態様による、例示的なシステムの絵図である。
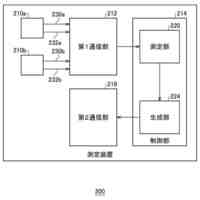
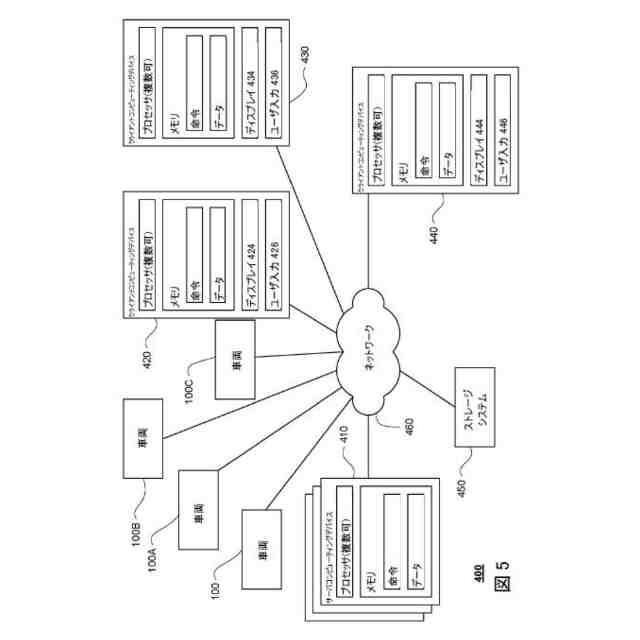
図5は、本開示の態様による、図4のシステムの機能図である。
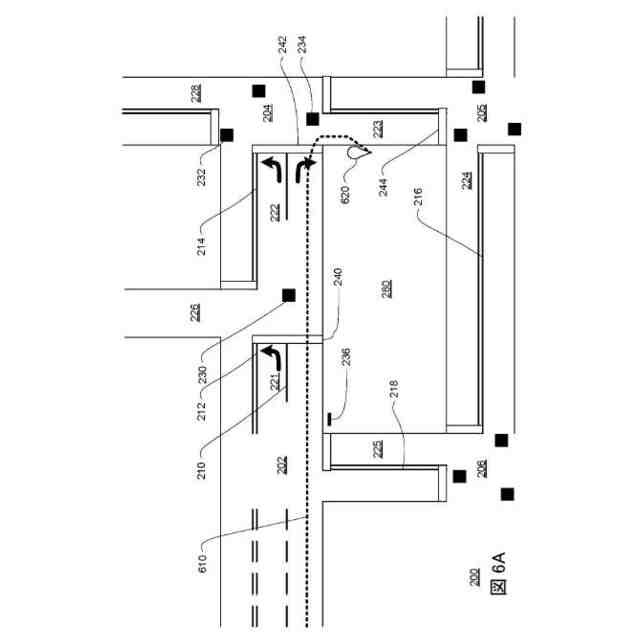
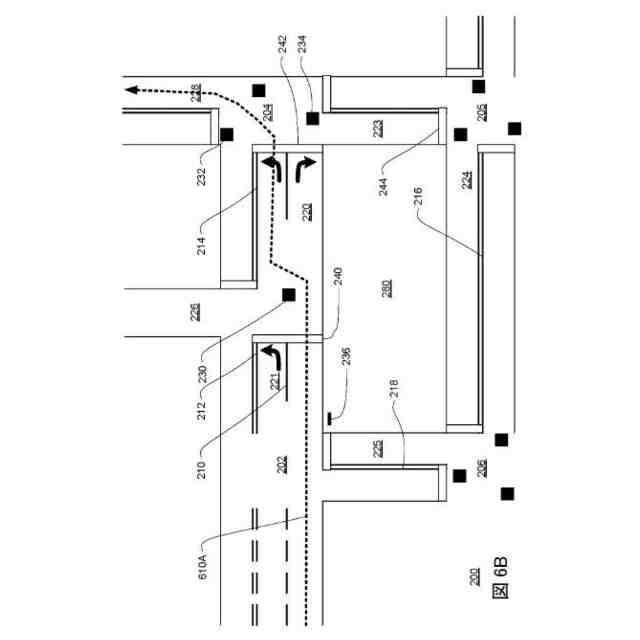
図6A~6Dは、本開示の態様による、マップ情報、及び経路の実施例である。
図6A~6Dは、本開示の態様による、マップ情報、及び経路の実施例である。
図6A~6Dは、本開示の態様による、マップ情報、及び経路の実施例である。
図6A~6Dは、本開示の態様による、マップ情報、及び経路の実施例である。
図7は、マップ情報の実施例であり、本開示の態様による。
図8は、マップ情報の実施例であり、本開示の態様による。
図9は、本開示の態様による、マップ情報、及び経路の実施例である。
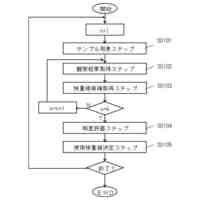
図10は、本開示の態様による、フロー図である。
【発明を実施するための形態】
【0010】
概要
本技術は、自律車両の経路変動に関する。例えば、自律車両のフリートが共通マップを使用して特定のサービスエリアで動作する場合、このような自律車両は、自律車両を同一の道路、又は道路の一部上に、同一の、又は類似の時間にクラスター形成させる、同一の、又は類似の経路を使用し得る可能性が高い。これは、特定の道路の過剰使用、及び潜在的渋滞をもたらし得る。これはまた、複数の自律車両が1つの一般的な場所(例えば、空港、コンサート、スポーツ、又はその他のイベントの場合)へ、又はそこから移動している状況でも生じ得る。いくつかの事例では、自律車両が特定の道路にストランド状になる場合、他の自律車両もこのような道路を使用する場合、それらはまた、ストランド状になり、更に大きな混雑の懸念を引き起こす場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
表示装置
5日前
株式会社チノー
測定装置
12日前
有限会社原製作所
検出回路
3日前
日本無線株式会社
レーダ装置
4日前
株式会社リコー
光学機器
3日前
株式会社チノー
検量線の取得方法
12日前
日本精機株式会社
二酸化炭素濃度測定器
10日前
大和製衡株式会社
組合せ計量装置
5日前
学校法人 中央大学
管内径推定装置
16日前
NISSHA株式会社
ガス検出器
8日前
株式会社村田製作所
厚み測定装置
12日前
本田技研工業株式会社
車載検出器
12日前
キヤノン株式会社
光学装置
9日前
スズキ株式会社
ECU交換診断システム
9日前
株式会社アイシン
電流センサ
9日前
株式会社イシダ
X線検査装置
2日前
トヨタ自動車株式会社
鋳巣の強度評価方法
16日前
株式会社北斗測量設計社
測量用ポール座標軸設置台
12日前
金井重要工業株式会社
粘度測定具及びスプーン
8日前
レーザーテック株式会社
検査装置及び検査方法
12日前
個人
透過電子顕微鏡用リボン状連続超薄切片回収治具
5日前
株式会社デンソーウェーブ
三次元計測装置
8日前
シンフォニアテクノロジー株式会社
回転試験装置
8日前
株式会社イシダ
X線検査装置
8日前
株式会社ザイエンス
呈色方法
3日前
光大科技股分有限公司
検体採取装置
4日前
株式会社JVCケンウッド
車両および制御システム
8日前
ウェイモ エルエルシー
自律車両の経路変動
3日前
愛三工業株式会社
分析試料
8日前
本田技研工業株式会社
電池劣化推定装置
8日前
個人
走査型プローブ顕微鏡システム及び検出対象の検出方法
1日前
未来工業株式会社
ゲージ及び配線ボックス装置
2日前
パナソニックIPマネジメント株式会社
制御システム
17日前
本田技研工業株式会社
光信号切替えモジュール
12日前
東ソー株式会社
懸濁状態のイオン交換樹脂によるサプレッサー
12日前
日産自動車株式会社
診断装置
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ