TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090044
公報種別
公開特許公報(A)
公開日
2025-06-17
出願番号
2023205005
出願日
2023-12-05
発明の名称
モデル生成装置、モデル生成方法、プログラム
出願人
日本電気株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G06T
7/00 20170101AFI20250610BHJP(計算;計数)
要約
【課題】空間を計測した計測データから物体を認識する場合において認識精度が低下すること。
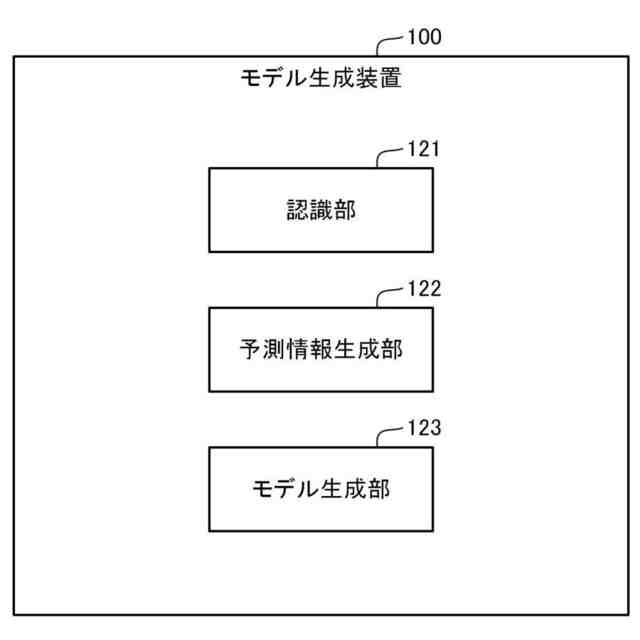
【解決手段】本開示のモデル生成装置100は、センサにて空間を計測した複数のフレームからなる計測データから、フレーム毎に認識した物体の情報を表す物体認識情報を生成する認識部121と、フレーム毎に、空間の計測時の状況を表す状況情報を物体認識情報に付加した予測情報を生成する予測情報生成部122と、複数のフレームに対応する複数の予測情報を入力とし、空間における物体認識結果を出力するモデルを、入力された複数の予測情報と出力された物体認識結果と物体認識結果の正解データとを用いて機械学習することにより生成するモデル生成部123と、を備える。
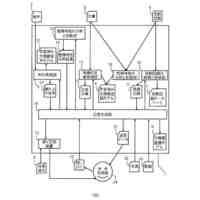
【選択図】図10
特許請求の範囲
【請求項1】
センサにて空間を計測した複数のフレームからなる計測データから、前記フレーム毎に認識した物体の情報を表す物体認識情報を生成する認識部と、
前記フレーム毎に、前記空間の計測時の状況を表す状況情報を前記物体認識情報に付加した予測情報を生成する予測情報生成部と、
複数の前記フレームに対応する複数の前記予測情報を入力とし、前記空間における物体認識結果を出力するモデルを、入力された複数の前記予測情報と出力された前記物体認識結果と当該物体認識結果の正解データとを用いて機械学習することにより生成するモデル生成部と、
を備えたモデル生成装置。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載のモデル生成装置であって、
前記予測情報生成部は、前記フレーム毎に、前記計測データに基づく情報を生成して前記状況情報とし、当該状況情報を前記物体認識情報に付加した前記予測情報を生成する、
モデル生成装置。
【請求項3】
請求項2に記載のモデル生成装置であって、
前記認識部は、前記フレーム毎に、認識した前記物体の位置を含む前記物体認識情報を生成し、
前記予測情報生成部は、前記フレーム毎に、認識した前記物体の位置における前記計測データの特徴量を生成して前記状況情報とし、当該状況情報を前記物体認識情報に付加した前記予測情報を生成する、
モデル生成装置。
【請求項4】
請求項1に記載のモデル生成装置であって、
前記予測情報生成部は、前記フレーム毎に、前記空間における前記センサの状態を表す情報を前記状況情報とし、当該状況情報を前記物体認識情報に付加した前記予測情報を生成する、
モデル生成装置。
【請求項5】
請求項4に記載のモデル生成装置であって、
前記認識部は、前記フレーム毎に、認識した前記物体の位置を含む前記物体認識情報を生成し、
前記予測情報生成部は、前記フレーム毎に、認識した前記物体の位置に対する前記センサの距離を前記状況情報とし、当該状況情報を前記物体認識情報に付加した前記予測情報を生成する、
モデル生成装置。
【請求項6】
請求項1に記載のモデル生成装置であって、
前記認識部は、前記フレーム毎に、認識した前記物体の位置を含む前記物体認識情報を生成し、
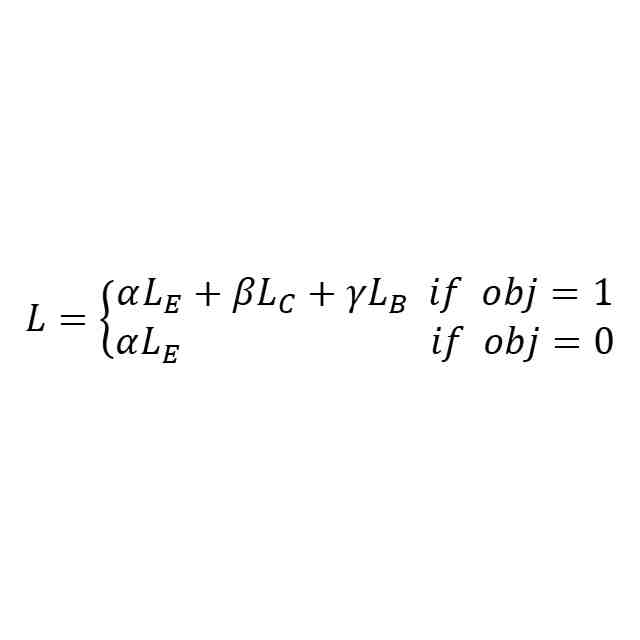
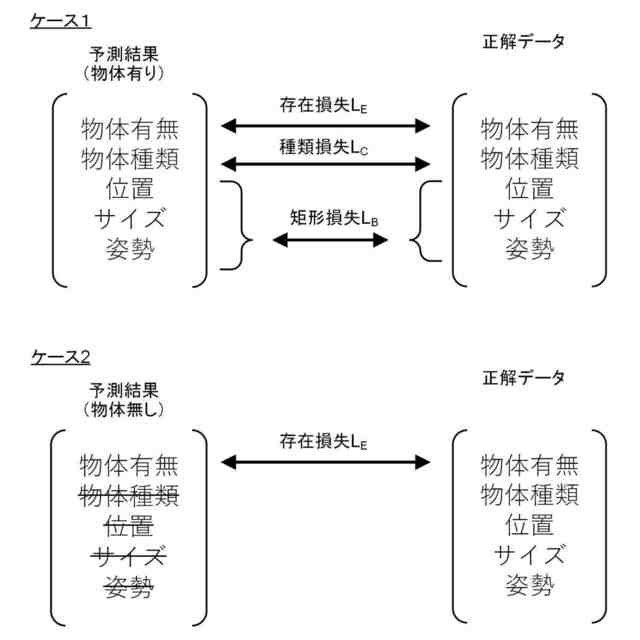
前記モデル生成部は、前記物体が存在するか否かの情報と前記物体の位置を表す情報とを少なくとも含む前記モデルから出力された前記物体認識結果と、当該物体認識結果の前記正解データと、の差に応じた損失を用いて前記モデルを機械学習する、
モデル生成装置。
【請求項7】
請求項6に記載のモデル生成装置であって、
前記モデル生成部は、前記モデルから出力された前記物体認識結果に前記物体が存在していない旨の情報が含まれている場合に、前記物体が存在するか否かの情報のみの前記物体認識結果と、当該物体認識結果の前記正解データと、の差に応じた損失を用いて前記モデルを機械学習する、
モデル生成装置。
【請求項8】
請求項1に記載のモデル生成装置であって、
前記認識部は、前記フレーム毎に、認識した前記物体の位置を含む前記物体認識情報を生成し、
前記予測情報生成部は、認識した前記物体の位置に基づいて前記物体認識情報から生成された前記予測情報のグループを生成し、
前記モデル生成部は、同一の前記グループに属する前記予測情報を前記モデルに対する入力として機械学習する、
モデル生成装置。
【請求項9】
センサにて空間を計測した複数のフレームからなる計測データから、前記フレーム毎に認識した物体の情報を表す物体認識情報を生成し、
前記フレーム毎に、前記空間の計測時の状況を表す状況情報を前記物体認識情報に付加した予測情報を生成し、
複数の前記フレームに対応する複数の前記予測情報を入力とし、前記空間における物体認識結果を出力するモデルを、入力された複数の前記予測情報と出力された前記物体認識結果と当該物体認識結果の正解データとを用いて機械学習することにより生成する、
モデル生成方法。
【請求項10】
センサにて空間を計測した複数のフレームからなる計測データから、前記フレーム毎に認識した物体の情報を表す物体認識情報を生成し、
前記フレーム毎に、前記空間の計測時の状況を表す状況情報を前記物体認識情報に付加した予測情報を生成し、
複数の前記フレームに対応する複数の前記予測情報を入力とし、前記空間における物体認識結果を出力するモデルを、入力された複数の前記予測情報と出力された前記物体認識結果と当該物体認識結果の正解データとを用いて機械学習することにより生成する、
処理をコンピュータに実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モデル生成装置、モデル生成方法、プログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1に記載のように、空間内を計測した計測データを用いて物体を認識することが行われている。具体的に、特許文献1では、倉庫内を計測した距離データを用いて荷物の位置を認識することが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2010-23950号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した特許文献1に記載のように技術では、計測データである点群データが疎である場合があり、かかる場合には物体の認識精度が低下する、という問題が生じる。
【0005】
このため、本開示の目的は、上述した課題である、空間を計測した計測データから物体を認識する場合において認識精度が低下する、ことを解決することにある。
【課題を解決するための手段】
【0006】
本開示の一形態であるモデル生成装置は、
センサにて空間を計測した複数のフレームからなる計測データから、前記フレーム毎に認識した物体の情報を表す物体認識情報を生成する認識部と、
前記フレーム毎に、前記空間の計測時の状況を表す状況情報を前記物体認識情報に付加した予測情報を生成する予測情報生成部と、
複数の前記フレームに対応する複数の前記予測情報を入力とし、前記空間における物体認識結果を出力するモデルを、入力された複数の前記予測情報と出力された前記物体認識結果と当該物体認識結果の正解データとを用いて機械学習することにより生成するモデル生成部と、
を備えた、
という構成をとる。
また、本開示の一形態であるモデル生成方法は、
センサにて空間を計測した複数のフレームからなる計測データから、前記フレーム毎に認識した物体の情報を表す物体認識情報を生成し、
前記フレーム毎に、前記空間の計測時の状況を表す状況情報を前記物体認識情報に付加した予測情報を生成し、
複数の前記フレームに対応する複数の前記予測情報を入力とし、前記空間における物体認識結果を出力するモデルを、入力された複数の前記予測情報と出力された前記物体認識結果と当該物体認識結果の正解データとを用いて機械学習することにより生成する、
という構成をとる。
また、本開示の一形態であるプログラムは、
センサにて空間を計測した複数のフレームからなる計測データから、前記フレーム毎に認識した物体の情報を表す物体認識情報を生成し、
前記フレーム毎に、前記空間の計測時の状況を表す状況情報を前記物体認識情報に付加した予測情報を生成し、
複数の前記フレームに対応する複数の前記予測情報を入力とし、前記空間における物体認識結果を出力するモデルを、入力された複数の前記予測情報と出力された前記物体認識結果と当該物体認識結果の正解データとを用いて機械学習することにより生成する、
処理をコンピュータに実行させる、
という構成をとる。
【発明の効果】
【0007】
本開示は、以上のように構成されることにより、空間を計測した計測データから物体を認識する場合における認識精度の向上を図ることができる。
【図面の簡単な説明】
【0008】
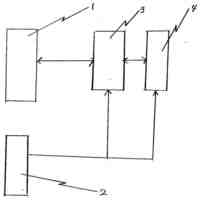
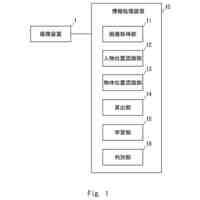
本開示にかかるモデル生成装置の構成を示すブロック図である。
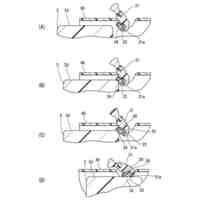
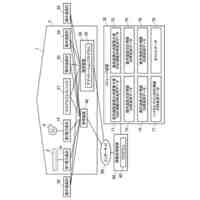
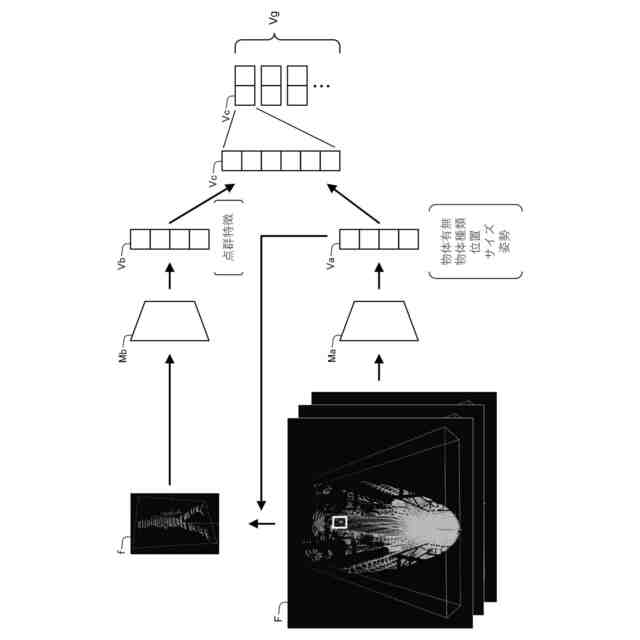
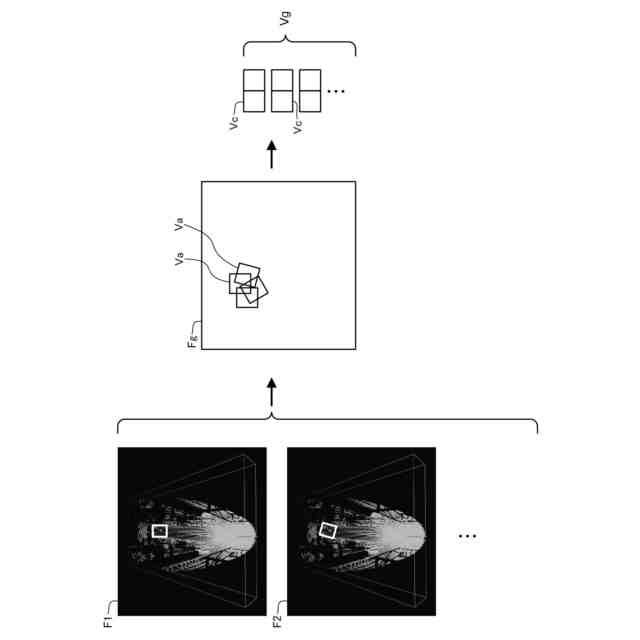
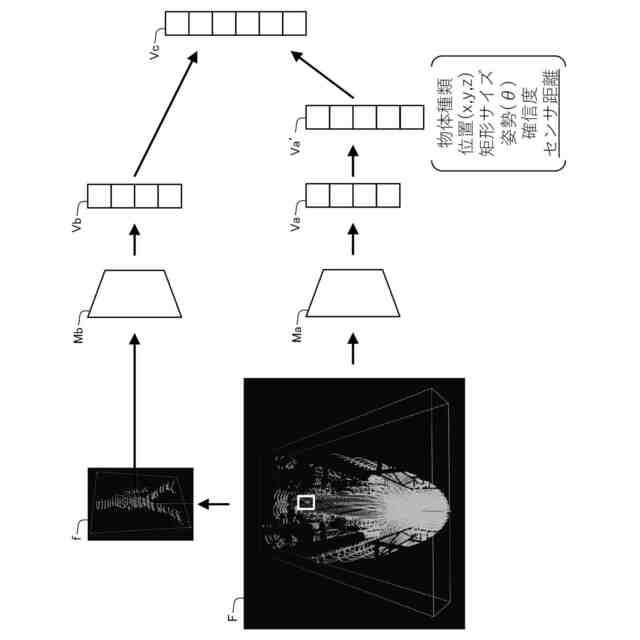
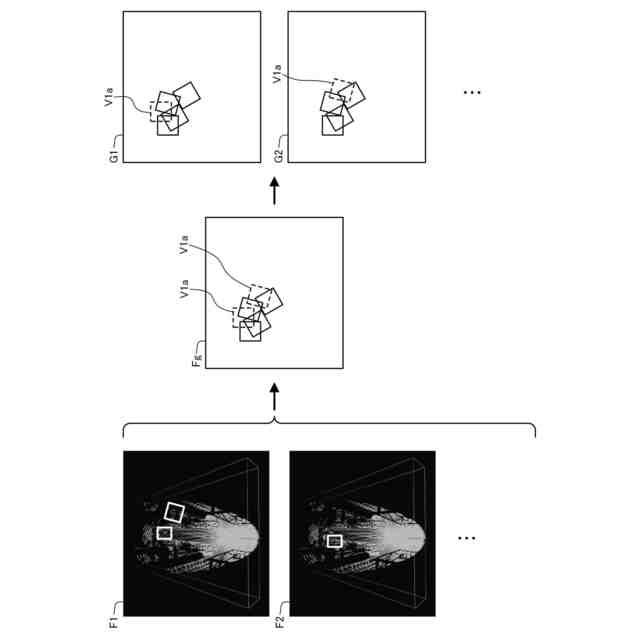
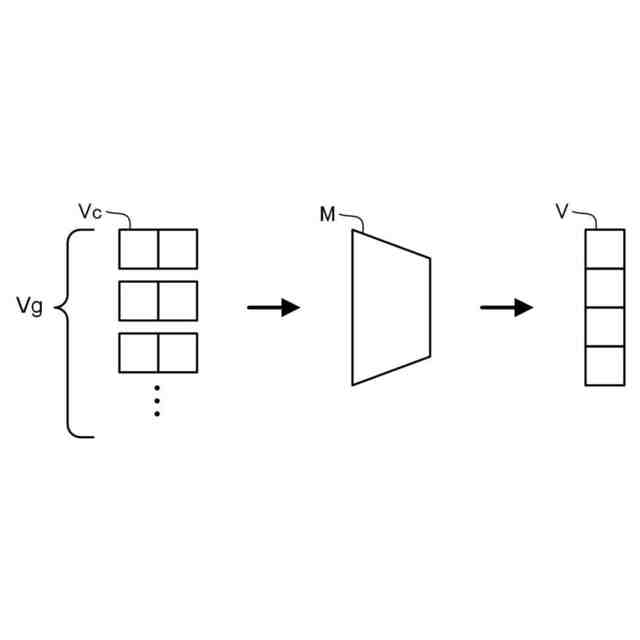
本開示にかかるモデル生成装置による処理の様子を示す図である。
本開示にかかるモデル生成装置による処理の様子を示す図である。
本開示にかかるモデル生成装置による処理の様子を示す図である。
本開示にかかるモデル生成装置による処理の様子を示す図である。
本開示にかかるモデル生成装置による処理の様子を示す図である。
本開示にかかるモデル生成装置による処理の様子を示す図である。
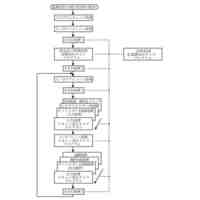
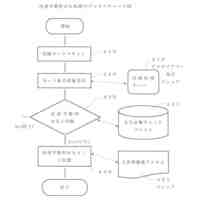
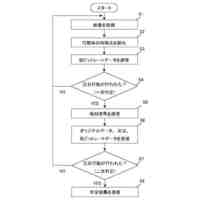
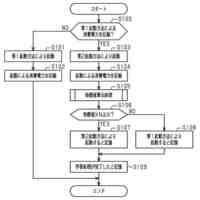
本開示にかかるモデル生成装置の処理動作を示すフローチャートである。
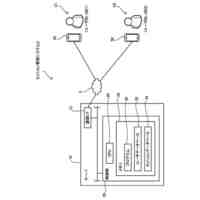
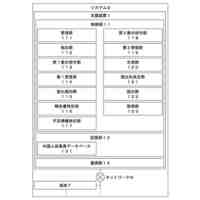
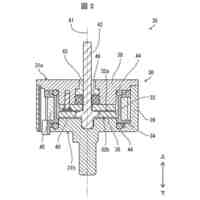
本開示にかかるモデル生成装置のハードウェア構成を示すブロック図である。
本開示にかかるモデル生成装置の構成を示すブロック図である。
【発明を実施するための形態】
【0009】
<第1の実施形態>
本開示の第1の実施形態について、図面を参照して説明する。なお、図面はいずれの実施形態においても関連しうる。
【0010】
[構成]
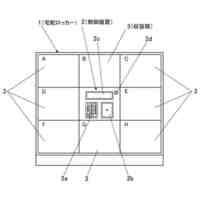
本実施形態におけるモデル生成装置10は、空間内を計測した計測データから物体を認識するモデルを生成するものである。本実施形態では、一例として、倉庫内の空間を計測した計測データから、物体である荷物や重機、人物などを認識するモデルを生成することとする。但し、認識する物体は倉庫内の荷物等であることに限定されずいかなる物体でもよく、また、空間も倉庫内であることに限定されず、いかなる場所であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
対話装置
10日前
個人
情報処理装置
10日前
個人
物品給付年金
1か月前
個人
政治のAI化
1か月前
個人
RFタグ読取装置
1か月前
個人
在宅介護システム
1か月前
個人
人物再現システム
2か月前
個人
情報処理装置
6日前
個人
プラグインホームページ
24日前
個人
情報入力装置
10日前
個人
AI飲食最適化プラグイン
1か月前
個人
物価スライド機能付生命保険
10日前
キヤノン株式会社
通信装置
1か月前
個人
電話管理システム及び管理方法
2か月前
個人
マイホーム非電子入札システム
10日前
個人
全アルゴリズム対応型プログラム
1か月前
キヤノン株式会社
画像処理装置
1か月前
株式会社BONNOU
管理装置
3日前
大同特殊鋼株式会社
輝線検出方法
1か月前
シャープ株式会社
電子機器
1か月前
サクサ株式会社
カードの制動構造
12日前
株式会社CROSLAN
支援装置
1か月前
個人
決済手数料0%のクレジットカード
13日前
トヨタ自動車株式会社
欠け検査装置
1か月前
株式会社ライト
情報処理装置
3日前
パテントフレア株式会社
交差型バーコード
26日前
株式会社アジラ
データ転送システム
1か月前
ひびきの電子株式会社
認証システム
1か月前
長屋印刷株式会社
画像形成システム
1か月前
ミサワホーム株式会社
宅配ロッカー
1か月前
村田機械株式会社
割当補助システム
16日前
ミサワホーム株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
情報処理装置
16日前
オムロン株式会社
回転装置及びマウス
1か月前
応研株式会社
業務支援システム
24日前
トヨタ自動車株式会社
管理装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ