TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112202
公報種別
公開特許公報(A)
公開日
2025-07-31
出願番号
2024006361
出願日
2024-01-18
発明の名称
パレット及びロボットシステム
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B23P
19/00 20060101AFI20250724BHJP(工作機械;他に分類されない金属加工)
要約
【課題】ワークピースを安定的に支持する。
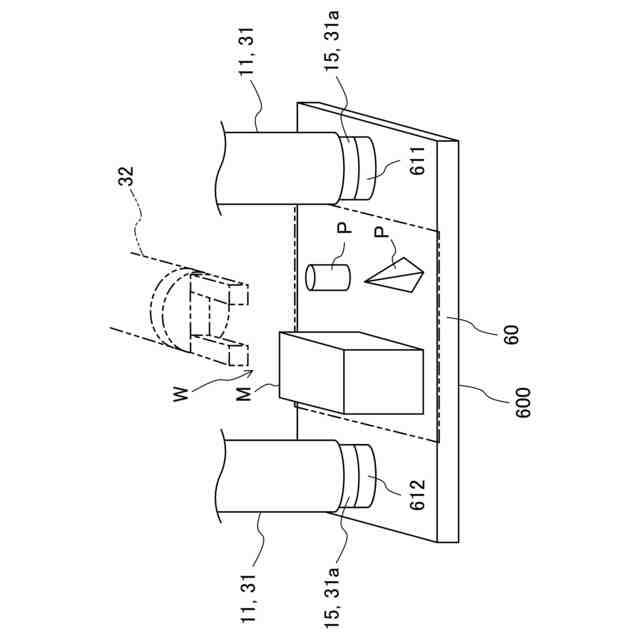
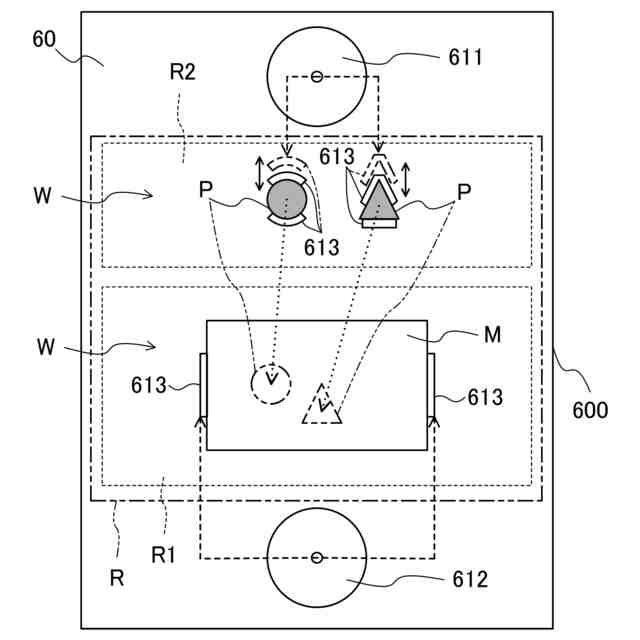
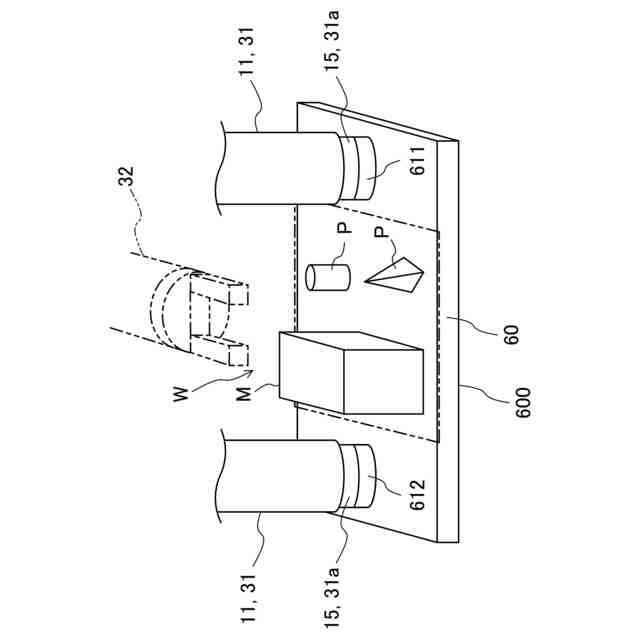
【解決手段】パレット60は、作業ロボット32が作業するワークピースWを保持する本体600と、本体に一体化され、かつ本体を支持するロボット11、31のツールチェンジャー15、31aが着脱可能に連結されるコネクタ611、612と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
作業ロボットが作業するワークピースを保持する本体と、
前記本体に一体化され、かつ前記本体を支持するロボットのツールチェンジャーが着脱可能に連結されるコネクタと、
を備える、パレット。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載のパレットにおいて、
前記本体は、第1ワークピースと第2ワークピースとを含む複数の前記ワークピースを保持する、パレット。
【請求項3】
請求項2に記載のパレットにおいて、
前記第1ワークピースは、前記作業ロボットによって、前記第2ワークピースへ組み付けられ、
前記本体は、前記第1ワークピースが組み付けられた前記第2ワークピースを保持する、パレット。
【請求項4】
請求項1~3のいずれか1項に記載のパレットにおいて、
前記本体に一体化された第2コネクタをさらに備えるパレット。
【請求項5】
請求項1に記載のパレットにおいて、
前記本体は、前記ワークピースを把持すると共に、把持している前記ワークピースを解放するクランプを有し、
前記コネクタは、前記クランプに接続されると共に、前記ツールチェンジャーが連結された前記ロボットから前記クランプへの解放指令を中継する、パレット。
【請求項6】
第1及び第2コネクタを有し、かつ作業ロボットが作業するワークピースを保持するパレットと、
前記第1コネクタに第1ツールチェンジャーが着脱可能に連結され、かつ前記パレットを支持する第1ロボットと、
前記第2コネクタに第2ツールチェンジャーが着脱可能に連結され、かつ前記パレットを支持すると共に、前記作業ロボットの作業位置へ前記ワークピースを搬送するために、前記第1ロボットとの間で前記パレットを受け渡す第2ロボットと、
を備える、ロボットシステム。
【請求項7】
第1及び第2コネクタを有し、かつ作業ロボットが作業するワークピースを保持するパレットと、
前記第1コネクタに第1ツールチェンジャーが着脱可能に連結され、かつ前記パレットを支持する第1ロボットと、
前記第2コネクタに第2ツールチェンジャーが着脱可能に連結され、かつ前記作業ロボットが前記ワークピースの作業をしている間、前記第1ロボットと共に、前記ワークピースを保持している前記パレットを支持する第2ロボットと、
を備える、ロボットシステム。
【請求項8】
請求項7に記載のロボットシステムにおいて、
前記パレットは、第1ワークピースと第2ワークピースとを含む複数の前記ワークピースを保持し、
前記作業ロボットは、前記パレットにおいて、前記第1ワークピースを、前記パレットに保持された前記第2ワークピースへ組み付け、
前記パレットは、前記第1ワークピースが組み付けられた前記第2ワークピースを保持する、ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、パレット及びロボットシステムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1は、従来の搬送システムを開示する。従来の搬送システムでは、加工機から出力された被搬送物を保持する吸着カップと、吸着カップとともに被搬送物を水平面内で搬送方向に駆動可能なアームと、を備えた搬送ロボットが、搬送方向に複数配設される。従来の搬送システムは、搬送路に沿って設けられ、被搬送物を支持する支持台を有し、搬送ロボットは、吸着カップによって保持した被搬送物を支持台上で摺動させながら搬送し、搬送方向下流側に位置する他の搬送ロボットに被搬送物を渡す。
【0003】
特許文献2は、従来の別の搬送システムを開示する。別の搬送システムでは、アームと、グリップとを備えたロボットが、搬送方向に複数配設される。グリップは、被搬送物を把持しかつ被搬送物を解放する。複数のロボットは、被搬送物の受け渡し及び受け取りを行うことにより、被搬送物を搬送する。
【先行技術文献】
【特許文献】
【0004】
特許第4274101号公報
特許第3948327号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の搬送システムにおいて、ロボットは、吸着カップ又はグリップによって被搬送物を直接保持する。ロボットは、被搬送物を安定して保持することが難しい。また、吸着カップ又はグリップは、特定の形状の被搬送物しか保持できない。被搬送物の形状が変わると、ロボットは、被搬送物を保持できない。従来の搬送システムは、汎用性に欠ける。
【課題を解決するための手段】
【0006】
ここに開示するパレットは、
作業ロボットが作業するワークピースを保持する本体と、
前記本体に一体化され、かつ前記本体を支持するロボットのツールチェンジャーが着脱可能に連結されるコネクタと、
を備える。
【発明の効果】
【0007】
ロボットは、ツールチェンジャーとコネクタとの連結により、パレットを介してワークピースを安定的に支持できる。
【図面の簡単な説明】
【0008】
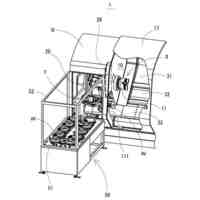
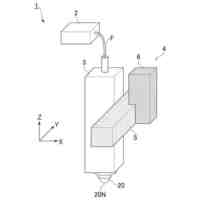
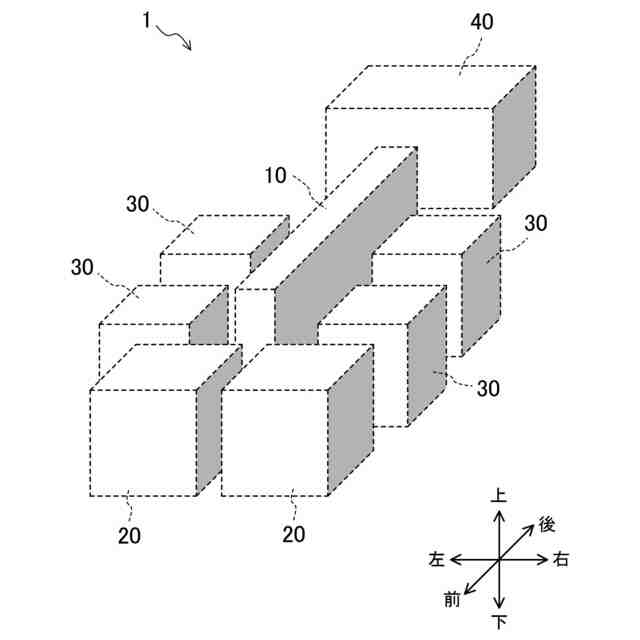
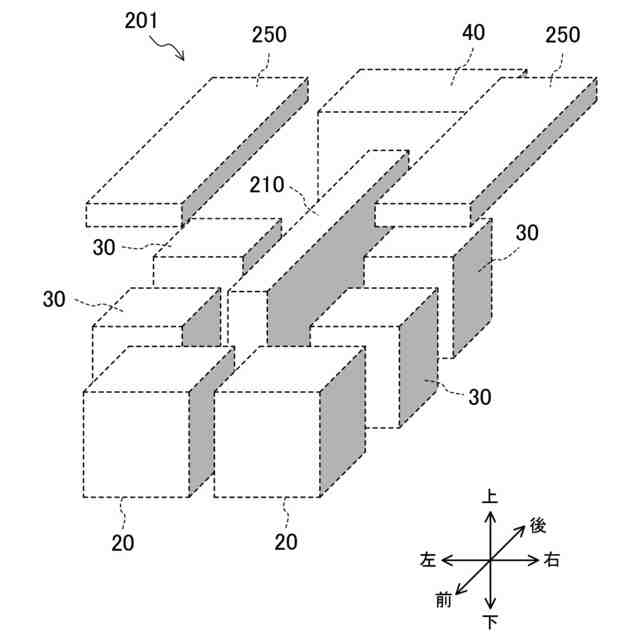
図1は、実施形態1に係る作業設備における各エリアの配置を示す概略斜視図である。
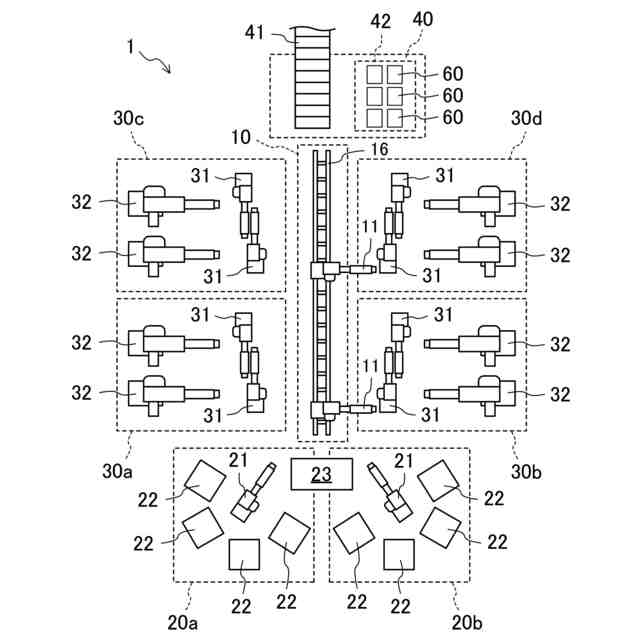
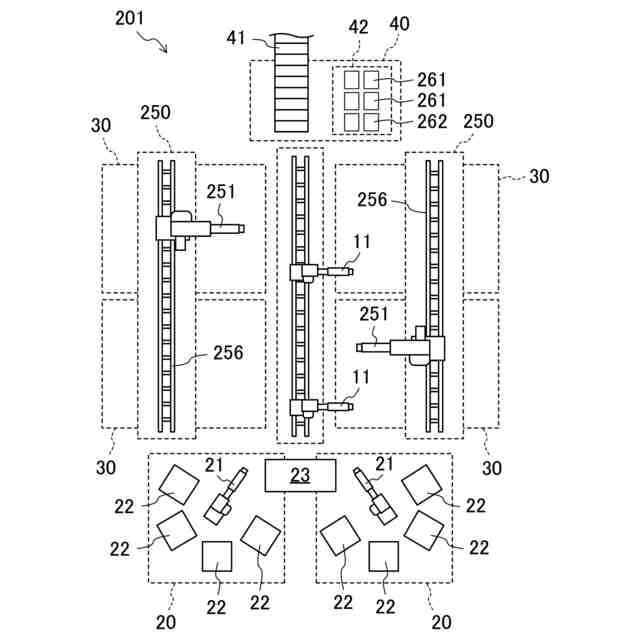
図2は、作業設備の平面図である。
図3は、作業設備を保管エリア側から見た図である。
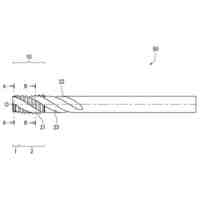
図4は、搬送に用いられるパレットの一例を示す平面図である。
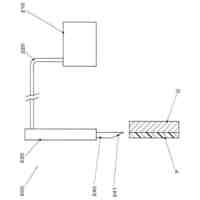
図5は、2台のロボット間でパレットを支持する動作を示す概略図である。
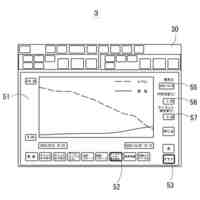
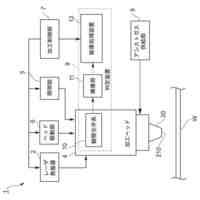
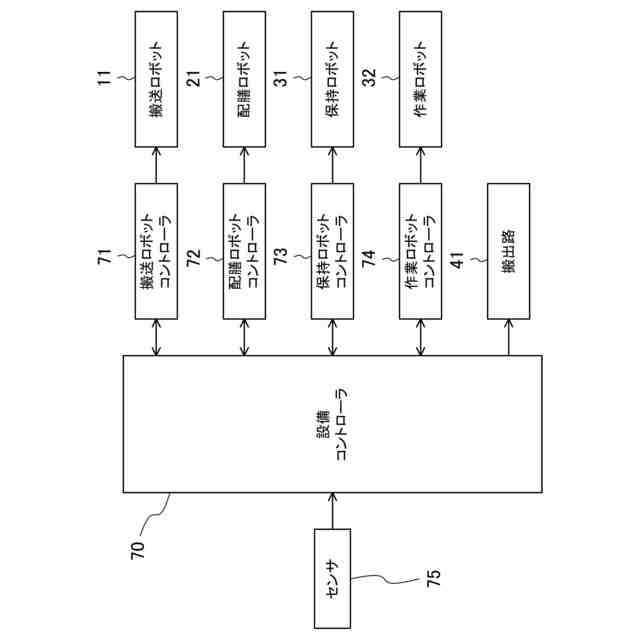
図6は、作業設備の制御システムを示すブロック図である。
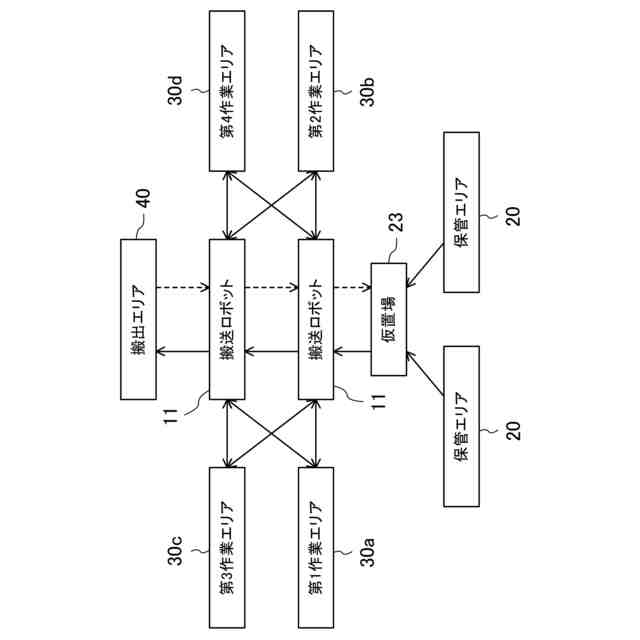
図7は、エリア間におけるパレットの移動ルートを示す概略図である。
図8は、実施形態2に係る作業設備における各エリアの配置を示す概略斜視図である。
図9は、実施形態2に係る作業設備の第2搬送エリアを示す平面図である。
図10は、実施形態2に係る作業設備を保管エリア側から見た図である。
図11は、パレットの第1変形例を示す斜視図である。
図12は、パレットの第2変形例を示す斜視図である。
図13は、パレットの第3変形例を示す斜視図である。
図14は、パレットの第4変形例を示す斜視図である。
【発明を実施するための形態】
【0009】
以下、パレット及びロボットシステムの実施形態について、図面を参照しながら説明する。ここで説明するパレット及びロボットシステムは例示である。
【0010】
(実施形態1)
〔作業設備の全体構造〕
図1は、作業設備1の各エリアの配置を示す概略斜視図である。作業設備1は、例えば、ワークピースWの組み立て作業やワークピースWに対する溶接作業を行う設備である。ワークピースWは、例えば、エンジンなどのデバイス、ボデーなどの車体を構成するパーツ、計算機などを含む。ここに開示するパレット及びロボットシステムは、作業設備1に適用される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
タップ
2か月前
個人
加工機
2か月前
麗豊実業股フン有限公司
ラクトバチルス・パラカセイNB23菌株及びそれを筋肉量の増加や抗メタボリック症候群に用いる用途
2か月前
株式会社不二越
ドリル
2か月前
日東精工株式会社
ねじ締め機
3か月前
株式会社北川鉄工所
回転装置
1か月前
株式会社不二越
ドリル
3か月前
日東精工株式会社
ねじ締め機
2か月前
株式会社ダイヘン
溶接電源装置
10日前
日東精工株式会社
ねじ締め装置
1か月前
株式会社ダイヘン
溶接電源装置
12日前
株式会社FUJI
工作機械
3か月前
株式会社FUJI
工作機械
1か月前
株式会社FUJI
工作機械
27日前
日東精工株式会社
多軸ねじ締め機
3か月前
株式会社ダイヘン
多層盛り溶接方法
3か月前
エフ・ピー・ツール株式会社
リーマ
3か月前
株式会社アンド
半田付け方法
2か月前
株式会社アンド
半田付け方法
2か月前
日進工具株式会社
エンドミル
3か月前
大見工業株式会社
ドリル
5日前
村田機械株式会社
レーザ加工機
2か月前
村田機械株式会社
レーザ加工機
2か月前
株式会社トヨコー
被膜除去方法
2か月前
ブラザー工業株式会社
工作機械
3か月前
ブラザー工業株式会社
工作機械
3か月前
トヨタ自動車株式会社
接合方法
3か月前
株式会社不二越
管用テーパタップ
3か月前
株式会社ダイヘン
溶接装置
28日前
トヨタ自動車株式会社
溶接ヘッド
1か月前
住友重機械工業株式会社
加工装置
1か月前
株式会社ダイヘン
溶接装置
28日前
株式会社プロテリアル
金属箔の溶接方法
3か月前
トヨタ自動車株式会社
溶接ヘッド
1か月前
株式会社ダイヘン
溶接装置
3か月前
有限会社 ナプラ
ソルダペースト
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ