TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025114204
公報種別
公開特許公報(A)
公開日
2025-08-05
出願番号
2024008741
出願日
2024-01-24
発明の名称
自動着岸装置および自動着岸システム
出願人
スズキ株式会社
代理人
個人
,
個人
,
個人
主分類
B63H
25/04 20060101AFI20250729BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】自動着岸装置の船舶への導入の容易化を図る。
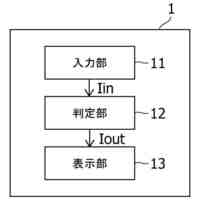
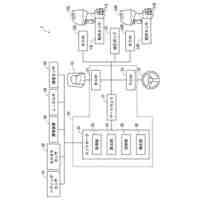
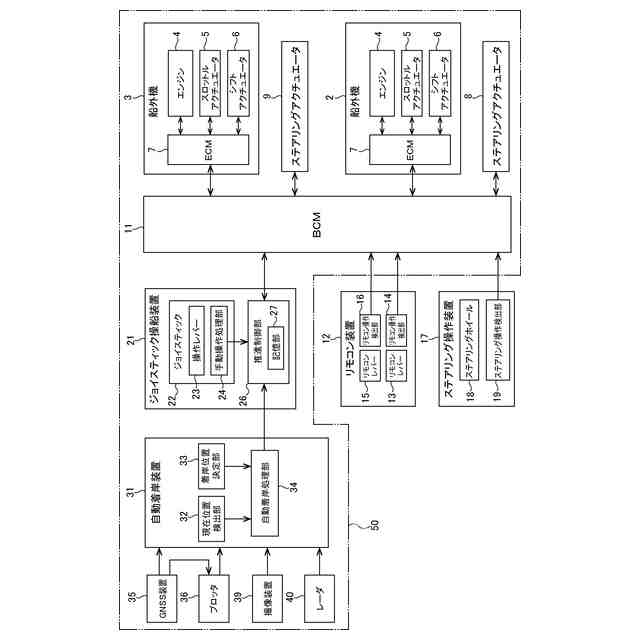
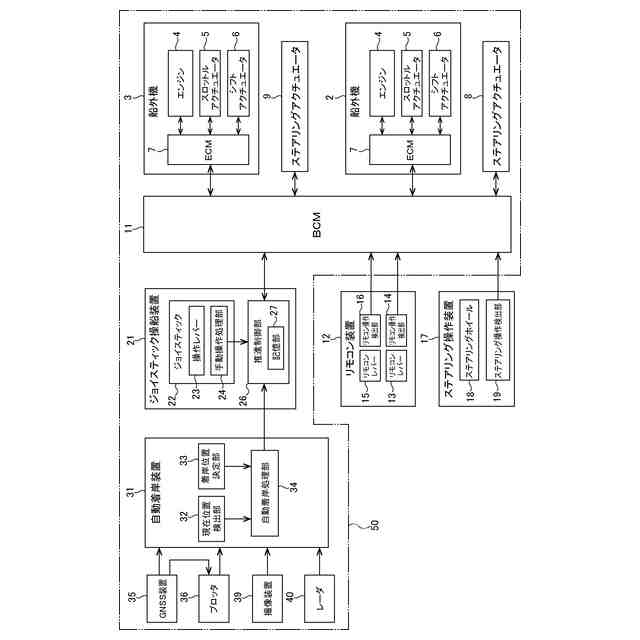
【解決手段】自動着岸装置31は、船外機2、3、ステアリングアクチュエータ8、9、およびジョイスティック操船装置21が設けられた船舶に適用される。ジョイスティック操船装置21は、操作レバー23、手動操作処理部24および推進制御部26を有し、手動操作処理部24は、操作レバー23の変位に対応するレバー操作信号を推進制御部26に出力し、推進制御部26は、レバー操作信号に基づき、船外機2、3等を制御することにより船舶を移動させる。自動着岸装置31は、船舶の現在位置を検出する現在位置検出部32、着岸位置を決定する着岸位置決定部33、および自動着岸処理部34を有し、自動着岸処理部34は、船舶をその現在位置から着岸位置まで移動させるのに要する操作レバー23の変位に対応するレバー操作信号をジョイスティック操船装置21の推進制御部26へ出力する。
【選択図】図1
特許請求の範囲
【請求項1】
船舶を自動的に着岸させる自動着岸装置であって、
前記船舶には、前記船舶の推進力を生成する船舶推進機、前記推進力の左右の方向を変える推進方向可変機構、およびジョイスティック操船装置が設けられ、
前記ジョイスティック操船装置は、操作レバー、手動操作処理部、および推進制御部を有し、
前記手動操作処理部は、前記操作レバーが操作されたときに、前記操作レバーの変位を検出し、当該検出した前記操作レバーの変位に対応するレバー操作信号を前記推進制御部に出力し、
前記推進制御部は、前記レバー操作信号に基づき、前記船舶推進機および前記推進力可変機構を制御することにより前記船舶を移動させ、
前記自動着岸装置は、
前記船舶の現在位置を検出する現在位置検出部と、
着岸位置を決定する着岸位置決定部と、
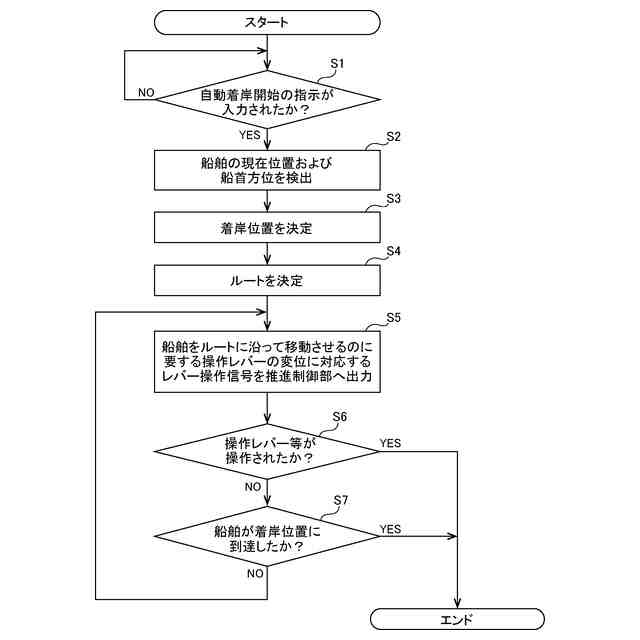
前記操作レバーが操作されず、かつ前記船舶を自動的に着岸させる旨の指示が入力されたときに、前記現在位置検出部により検出された前記船舶の現在位置から前記着岸位置決定部により決定された着岸位置まで前記船舶を移動させるのに要する前記操作レバーの変位に対応するレバー操作信号を前記ジョイスティック操船装置の前記推進制御部へ出力する自動着岸処理部とを有していることを特徴とする自動着岸装置。
続きを表示(約 1,200 文字)
【請求項2】
前記操作レバーが操作されたことによる前記操作レバーの変位と、前記現在位置検出部により検出された前記船舶の現在位置から前記着岸位置決定部により決定された着岸位置まで前記船舶を移動させるのに要する前記操作レバーの変位とが互いに同じである場合、前記自動着岸処理部は、前記手動操作処理部から前記推進制御部に出力されるレバー操作信号と同じレバー操作信号を前記推進制御部へ出力することを特徴とする請求項1に記載の自動着岸装置。
【請求項3】
前記船舶には、前記船舶の周囲の障害物を検出する物体検出装置が設けられ、
前記自動着岸処理部は、前記物体検出装置により検出された障害物に前記船舶が接触することなく、前記現在位置検出部により検出された前記船舶の現在位置から前記着岸位置決定部により決定された着岸位置まで前記船舶を移動させるルートを決定し、前記船舶を前記ルートに沿って移動させるのに要する前記操作レバーの変位に対応するレバー操作信号を前記ジョイスティック操船装置の前記推進制御部へ出力することを特徴とする請求項1に記載の自動着岸装置。
【請求項4】
前記自動着岸処理部は、前記自動着岸処理部から前記推進制御部へ前記レバー操作信号を出力している間に、前記操作レバーが操作されたときには、前記自動着岸処理部から前記推進制御部への前記レバー操作信号の出力を停止することを特徴とする請求項1に記載の自動着岸装置。
【請求項5】
船舶を自動的に着岸させる自動着岸システムであって、
前記船舶の推進力を生成する船舶推進機、前記推進力の左右の方向を変える推進方向可変機構、ジョイスティック操船装置、および自動着岸装置を備え、
前記ジョイスティック操船装置は、操作レバー、手動操作処理部、および推進制御部を有し、
前記手動操作処理部は、前記操作レバーが操作されたときに、前記操作レバーの変位を検出し、当該検出した前記操作レバーの変位に対応するレバー操作信号を前記推進制御部に出力し、
前記推進制御部は、前記レバー操作信号に基づき、前記船舶推進機および前記推進力可変機構を制御することにより前記船舶を移動させ、
前記自動着岸装置は、
前記船舶の現在位置を検出する現在位置検出部と、
着岸位置を決定する着岸位置決定部と、
前記操作レバーが操作されず、かつ前記船舶を自動的に着岸させる旨の指示が入力されたときに、前記現在位置検出部により検出された前記船舶の現在位置から前記着岸位置決定部により決定された着岸位置まで前記船舶を移動させるのに要する前記操作レバーの変位に対応するレバー操作信号を前記ジョイスティック操船装置の前記推進制御部へ出力する自動着岸処理部とを有していることを特徴とする自動着岸システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、船舶を自動的に着岸させる自動着岸装置および自動着岸システムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
例えば、船舶の推進力を生成する船舶推進機、船舶推進機を遠隔操作するリモートコントロール装置(以下、リモートコントロールを「リモコン」と略す)、船舶推進機の舵角を変えるステアリングアクチュエータ、およびステアリングアクチュエータを遠隔操作するステアリング操作装置が設けられた船舶を操船する場合、操船者は、リモコン装置に設けられたリモコンレバーの傾斜角度を変えることにより、船舶推進機により生成される推進力の大きさを増減させ、これにより船舶の速度を増減させる。また、操船者は、リモコンレバーを傾ける方向を選択することにより、船舶推進機により生成される推進力の前後の方向を切り替え、これにより船舶の前進、後進の切替を行う。また、操船者は、ステアリング操作装置に設けられたステアリングホイールを回転させることにより、船舶推進機の舵角を変え、これにより船舶を旋回させる。
【0003】
一般に、船舶の着岸時の操船は難易度が高く、熟練を要する。操船者は、船舶を着岸させるに当たり、船舶を着岸位置に向けて前進させ、または適宜旋回させ、場合によっては切り返しを行う。操船者は、自己の船舶から着岸位置までの距離や、停泊している他の船舶と自己の船舶との距離等を目で測りつつ、船舶を低速で慎重に移動させる。船舶が低速であるときには、船舶は風を受けることによって大きく流される。それゆえ、操船者は風の方向および強さを考慮に入れつつ操船を行うのであるが、船舶を意図通りに操ることができるようになるには経験を重ねる必要がある。
【0004】
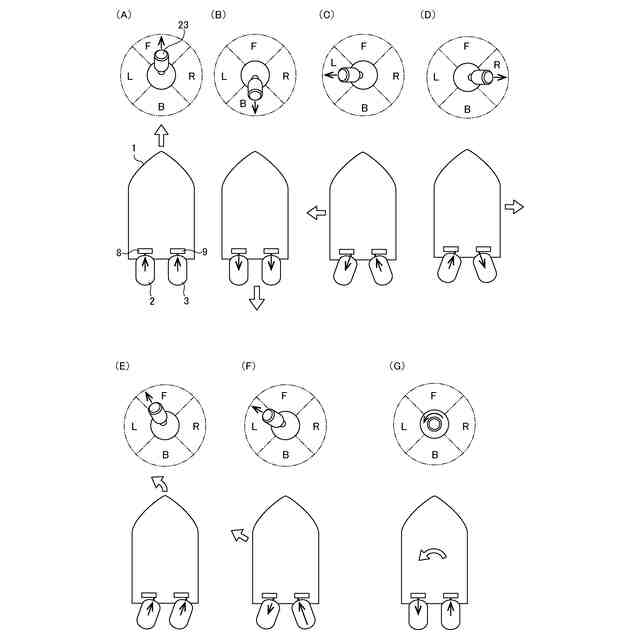
また、船舶の中には、船舶推進機、リモコン装置、ステアリングアクチュエータおよびステアリング操作装置に加え、ジョイスティック操船装置が設けられているものがある。ジョイスティック操船装置は、前、後ろ、左、右、左前、右前、左後ろおよび右後ろ等に傾けることができる操作レバーを有するジョイスティックと、操作レバーの傾斜方向に応じて、船舶推進機による推進力の生成の有無、船舶推進機により生成される推進力の前後の方向、および船舶推進機の舵角を一括制御する制御装置とを備えている。操船者は、操作レバーを傾けるだけで、船舶推進機およびステアリングアクチュエータを一括操作することができ、船舶を低速で前進させ、後進させ、または旋回させることができる。また、船舶に、2機以上の船舶推進機、およびこれらの船舶推進機にそれぞれ対応する2機以上のステアリングアクチュエータが設けられており、ジョイスティック操船装置の制御装置が、これらの船舶推進機による推進力の生成の有無、これらの船舶推進機により生成される推進力の前後の方向、およびこれらの船舶推進機の舵角を一括制御することができる構成である場合には、操船者は、ジョイスティックのレバーを左または右に傾けることにより、船舶を左横方向または右横方向に移動させることができる。ジョイスティック操船装置を用いることにより、リモコン装置およびステアリングホイールを用いる場合と比較して、船舶の着岸時の操船が容易になる。しかしながら、風が強いときなどには、船舶が操船者の予想に反して大きく流されてしまうことがあり、ジョイスティック操船装置を用いた場合でも着岸時の操船にはある程度の経験を要する。
【0005】
また、船舶を自動的に着岸させる自動着岸装置が知られている(例えば特許第7336565号公報を参照)。自動着岸装置は、衛星測位システムを利用して船舶の現在位置を取得し、船舶の現在位置から、利用者が指定した着岸位置まで船舶を自動航行させる。自動着岸装置によれば、船舶が風を受けて流された場合でも、そのときの船舶の現在位置を取得し、船舶が着岸位置に向かうように船舶の移動方向を自動的に修正することができる。自動着岸装置を用いることにより、操船者は船舶の着岸を容易に行うことができる。自動着岸装置によれば、着岸時の操船の経験が乏しい操船者を支援することができる。
【先行技術文献】
【特許文献】
【0006】
特許第7336565号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の自動着岸装置は、概して、船舶の現在位置および着岸位置を取得し、船舶を移動させる方向等を決定する決定部と、決定した方向へ船舶が移動するように、船舶推進機により生成される推進力の前後の方向、および船舶推進機の舵角等を制御する制御部とを有している。
【0008】
従来の自動着岸装置において、船舶を自動的に着岸させるためには、上記制御部により、船舶の移動を高精度に制御する必要がある。それゆえ、従来の自動着岸装置を船舶に導入する際には、上記制御部を、個々の船舶のスペックに合うようにセッティング(またはチューニング)する必要がある。具体的には、船舶の大きさ、船舶に設けられた船舶推進機の数、および各船舶推進機の出力等、船舶のスペックに関する多数の情報を自動着岸装置に設定する必要があり、また、船舶に合わせて、自動着岸装置における多数のパラメータを調整する必要がある。
【0009】
従来の自動着岸装置において、上記制御部のセッティングは、設定項目およびパラメータの調整項目が多く、煩雑である。それゆえ、自動着岸装置を船舶に導入することは容易でない。
【0010】
本発明は例えば上述したような問題に鑑みなされたものであり、本発明の課題は、自動着岸装置の船舶への導入の容易化を図ることができる自動着岸装置および自動着岸システムを提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
スズキ株式会社
内燃機関
15日前
スズキ株式会社
開閉機構
1か月前
スズキ株式会社
開閉機構
1か月前
スズキ株式会社
蓄熱装置
23日前
スズキ株式会社
溶接部材
2か月前
スズキ株式会社
電動車両
19日前
スズキ株式会社
船舶推進機
2か月前
スズキ株式会社
船舶推進機
2か月前
スズキ株式会社
船舶推進機
2か月前
スズキ株式会社
船舶推進機
2か月前
スズキ株式会社
ダンパ装置
2か月前
スズキ株式会社
錆判定装置
1か月前
スズキ株式会社
船舶推進機
2か月前
スズキ株式会社
船舶推進機
2か月前
スズキ株式会社
動力伝達装置
2か月前
スズキ株式会社
小型電動車両
18日前
スズキ株式会社
車体下部構造
2か月前
スズキ株式会社
自動運転装置
1か月前
スズキ株式会社
車両前部構造
25日前
スズキ株式会社
車体下部構造
2か月前
スズキ株式会社
車体下部構造
2か月前
スズキ株式会社
エアクリーナ
4日前
スズキ株式会社
燃料供給装置
2か月前
スズキ株式会社
可変動弁装置
2か月前
スズキ株式会社
車両用変速機
2か月前
スズキ株式会社
車両前部構造
3日前
スズキ株式会社
移動システム
9日前
スズキ株式会社
車体下部構造
4日前
スズキ株式会社
着桟支援装置
2か月前
スズキ株式会社
車体下部構造
4日前
スズキ株式会社
二輪車搭載装置
1か月前
スズキ株式会社
車両用制御装置
1日前
スズキ株式会社
車両用制御装置
1か月前
スズキ株式会社
車両の制動装置
1か月前
スズキ株式会社
車両の報知装置
2か月前
スズキ株式会社
車両用制御装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ