TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025126851
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024023283
出願日
2024-02-19
発明の名称
造形条件設定装置、積層造形システム、造形条件設定方法及びプログラム
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B23K
9/04 20060101AFI20250822BHJP(工作機械;他に分類されない金属加工)
要約
【課題】トーチと造形物を理想的な距離に保ちつつ、造形物の形状に応じて適切にトーチの角度を制御して積層造形する技術を提供する。
【解決手段】造形条件設定装置は、造形対象物をWAAM方式で積層造形する際の造形条件を設定する造形条件設定装置であって、トーチと造形物の距離の計測値と前記距離の設計値との差が許容範囲か否かを判定する手段と、前記差が許容範囲を超える場合には、前記差が前記許容範囲となるように前記造形条件に含まれる目標溶接位置を修正するとともに、修正後の前記目標溶接位置における前記造形対象物の形状に基づいて造形方向と一致するようにトーチ角度を修正する手段と、を有する。
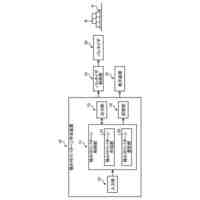
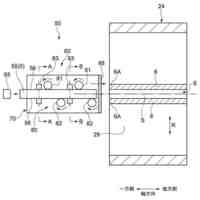
【選択図】図1
特許請求の範囲
【請求項1】
造形対象物をWAAM方式で積層造形する際の造形条件を設定する造形条件設定装置であって、
トーチと造形物の距離の計測値と前記距離の設計値との差が許容範囲か否かを判定する手段と、
前記差が許容範囲を超える場合には、前記差が前記許容範囲となるように前記造形条件に含まれる目標溶接位置を修正するとともに、修正後の前記目標溶接位置における前記造形対象物の形状に基づいて造形方向と一致するようにトーチ角度を修正する手段と、
を有する造形条件設定装置。
続きを表示(約 1,800 文字)
【請求項2】
前記差が前記許容範囲を超え、さらに前記差が前記造形物の過度な温度上昇を示す大きさを有する場合、前記造形条件として、前記造形物を冷却することを設定する手段、
をさらに有する請求項1に記載の造形条件設定装置。
【請求項3】
前記造形対象物が垂直方向に積層されて造形される形状の場合、
前記修正する手段は、
前記差が、前記トーチと前記造形物が前記許容範囲より近づいていることを示していれば、前記差に応じた値だけ、前記目標溶接位置を上方に修正し、
前記差が、前記トーチと前記造形物が前記許容範囲より離れていることを示していれば、前記差に応じた値だけ、前記目標溶接位置を下方に修正する、
請求項1または請求項2に記載の造形条件設定装置。
【請求項4】
前記造形対象物が傾斜した形状の場合、
前記修正する手段は、
前記差が、前記トーチと前記造形物が前記許容範囲より近づいていることを示していれば、前記差に応じた値だけ、前記目標溶接位置を前記傾斜した方向に沿って上層側に修正するとともに、修正後の前記目標溶接位置における前記造形対象物の形状が示す造形方向と一致し、かつ、前記トーチの先端が造形における下層方向を向くように前記トーチ角度を修正し、
前記差が、前記トーチと前記造形物が前記許容範囲より離れていることを示していれば、前記差に応じた値だけ、前記目標溶接位置を前記傾斜した方向に沿って下層側に修正するとともに、修正後の前記目標溶接位置における前記造形対象物の形状が示す造形方向と一致し、かつ、前記トーチの先端が造形における下層方向を向くように前記トーチ角度を修正する、
請求項1または請求項2に記載の造形条件設定装置。
【請求項5】
前記差が所定の第1閾値以下であれば、前記冷却することを設定する手段は、水又はガスを吹きかけることによって前記造形物を冷却することを決定する、
請求項2に記載の造形条件設定装置。
【請求項6】
前記差が前記第1閾値より大きな所定の第2閾値以上であれば、前記冷却することを設定する手段は、造形を一時停止することを決定する、
請求項5に記載の造形条件設定装置。
【請求項7】
造形対象物をWAAM方式で積層造形する積層造形システムであって、
トーチと、前記トーチと一定の位置関係で固定された造形物までの距離を計測するセンサと、を有する溶接システムと、
前記溶接システムを制御する制御装置と、
請求項1に記載の造形条件設定装置と、
を有する積層造形システム。
【請求項8】
造形対象物をWAAM方式で積層造形する積層造形システムであって、
トーチと、前記トーチと一定の位置関係で固定された造形物までの距離を計測するセンサと、前記造形物を冷却する冷却機と、を有する溶接システムと、
前記溶接システムを制御する制御装置と、
請求項2に記載の造形条件設定装置と、
を有する積層造形システム。
【請求項9】
コンピュータによって実行される、造形対象物をWAAM方式で積層造形する際の造形条件を設定する造形条件設定方法であって、
トーチと造形物の距離の計測値と前記距離の設計値との差が許容範囲か否かを判定するステップと、
前記差が許容範囲を超える場合には、前記差が前記許容範囲となるように前記造形条件に含まれる目標溶接位置を修正するとともに、修正後の前記目標溶接位置における前記造形対象物の形状に基づいて造形方向と一致するようにトーチ角度を修正するステップと、
を有する造形条件設定方法。
【請求項10】
コンピュータに、
造形対象物をWAAM方式で積層造形する際の造形条件を設定する処理あって、
トーチと造形物の距離の計測値と前記距離の設計値との差が許容範囲か否かを判定するステップと、
前記差が許容範囲を超える場合には、前記差が前記許容範囲となるように前記造形条件に含まれる目標溶接位置を修正するとともに、修正後の前記目標溶接位置における前記造形対象物の形状に基づいて造形方向と一致するようにトーチ角度を修正するステップと、
を有する処理、を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、造形条件設定装置、積層造形システム、造形条件設定方法及びプログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
溶加材を溶融及び凝固させた溶着ビードを積層して、所望の形状の造形物を造形するWAAM(Wire Arc Additive Manufacturing)方式の積層造形法(アークとワイヤによる積層造形法)が提供されている。造形物を高精度に作成するためには、溶着ビードの幅や高さを制御する必要があるが、実際の造形においては、所望の形状の溶着ビードが得られない場合がある。例えば、造形中に造形物の温度が過度に上昇すると、図8Aに示すように溶着ビードが扁平化し、造形幅が広がり、造形高さが低くなる。特に積層数が多い場合には、高さの誤差が積分値で効いてくるため、1層当たりではわずかな違いでも、層数が増えるとその違いは無視できず、形状の変化に加えて、トーチと造形物の間隔が変化して造形が不安定になったり、トーチと造形物が接触したりする可能性がある。このような課題に対し、特許文献1には、既設の溶着ビードの形状を、トーチに取り付けたセンサによって計測し、計測した溶着ビード高さの計測値と計画値との差を低減するために、溶加材の供給量、溶接速度、入熱量、ウィービング条件などの溶接条件を調整して、後続の積層造形を実施する方法が開示されている。しかし、溶接条件を変更すると、造形幅が変化する可能性がある。すると、例えば、積層造形における各層が1パス(1回の溶接)で造形されるような薄肉の造形物の場合、計画された造形物とは異なる肉厚の造形物が造形されることになり、好ましくない。
【0003】
造形中の過度な温度上昇により溶着ビードの形状が扁平になると、1層当たりではわずかな違いでも、層数が増えるとその違いの積分値でトーチと造形物の距離は変化するため、その違いは無視できず、トーチと造形物の距離が離れることになる。図8Bにトーチと造形物の距離と品質との関係を示す。図8Bの左図81にトーチと造形物の距離が理想的な状態を示す。図8Bの中図82にトーチと造形物の距離が離れた状態を示す。この場合、欠陥が生じたりアークが不安定になったりする。図8Bの右図83にトーチと造形物の距離が近づいた状態を示す。この場合、造形物とトーチが干渉したり、造形が不安定になったりする。溶着ビードが扁平になると、トーチと造形物が離れるため、溶接が不安定になる可能性がある。
また、造形物の造形角度が変化するようなものについては、溶着ビードの形状が扁平になると、多層の造形を行った場合に1層あたりの造形高さの誤差が積算されると同時に、弧の長さに応じた角度変化が反映されないため、計画された造形物とは、まったく異なる形状が造形されることになる。このような造形例を図8Cに示す。図8Cのライン84は造形対象物の形状を反映して設定した造形物の軌跡(トーチの先端部が移動する軌跡)を示し、ライン85は実際に造形された造形物の形状を示す。この例の場合、扁平化やトーチと造形物の距離の変化の影響による1層ごとの造形高さの誤差の蓄積と、それによりトーチの角度の変化を適切に変更できなかったことにより、目標とは異なる形状が造形されている。造形物の形状を変えることなく、積層造形を行うためには、造形幅の変化を招くような溶接条件の変更を行うことなく、トーチと造形物の間隔を理想的な距離に保つと同時に造形したい形状に応じてトーチ角度を変更して積層造形することが必要である。
【先行技術文献】
【特許文献】
【0004】
特許第6912636号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
トーチと造形物の間隔を理想的な距離に保ちつつ、造形物の形状に応じて適切にトーチ角度を制御して積層造形する技術を提供する。
【0006】
本開示は、上記課題を解決することができる造形条件設定装置、積層造形システム、造形条件設定方法及びプログラムを提供する。
【課題を解決するための手段】
【0007】
本開示に係る造形条件設定装置は、造形対象物をWAAM方式で積層造形する際の造形条件を設定する造形条件設定装置であって、トーチと造形物の距離の計測値と前記距離の設計値との差が許容範囲か否かを判定する手段と、前記差が許容範囲を超える場合には、前記差が前記許容範囲となるように前記造形条件に含まれる目標溶接位置を修正するとともに、修正後の前記目標溶接位置における前記造形対象物の形状に基づいて造形方向と一致するようにトーチ角度を修正する手段と、を有する。
【0008】
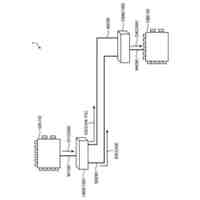
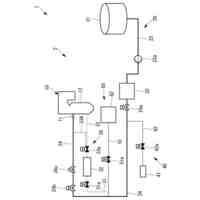
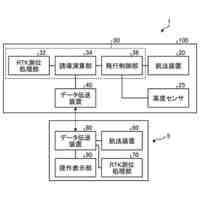
本開示に係る積層造形システムは、造形対象物をWAAM方式で積層造形する積層造形システムであって、トーチと、前記トーチと一定の位置関係で固定された造形物までの距離を計測するセンサと、を有する溶接システムと、前記溶接システムを制御する制御装置と、上記の造形条件設定装置と、を有する。
【0009】
本開示に係る造形条件設定方法は、造形条件設定方法は、コンピュータによって実行される、造形対象物をWAAM方式で積層造形する際の造形条件を設定する造形条件設定方法であって、トーチと造形物の距離の計測値と前記距離の設計値との差が許容範囲か否かを判定するステップと、前記差が許容範囲を超える場合には、前記差が前記許容範囲となるように前記造形条件に含まれる目標溶接位置を修正するとともに、修正後の前記目標溶接位置における前記造形対象物の形状に基づいて造形方向と一致するようにトーチ角度を修正するステップと、を有する。
【0010】
本開示に係るプログラムは、コンピュータに、造形対象物をWAAM方式で積層造形する際の造形条件を設定する処理あって、トーチと造形物の距離の計測値と前記距離の設計値との差が許容範囲か否かを判定するステップと、前記差が許容範囲を超える場合には、前記差が前記許容範囲となるように前記造形条件に含まれる目標溶接位置を修正するとともに、修正後の前記目標溶接位置における前記造形対象物の形状に基づいて造形方向と一致するようにトーチ角度を修正するステップと、を有する処理を実行させる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱重工業株式会社
ポンプ
10日前
三菱重工業株式会社
冷却システム
3日前
三菱重工業株式会社
水素製造装置
2日前
三菱重工業株式会社
位置計測方法
今日
三菱重工業株式会社
電動ターボ機械
14日前
三菱重工業株式会社
電解セル、及び電解装置
10日前
三菱重工業株式会社
電解セル、及び電解装置
10日前
三菱重工業株式会社
炭化炉及びその制御方法
今日
三菱重工業株式会社
燃料噴射装置および往復動内燃機関
3日前
三菱重工業株式会社
ガス処理設備及びガス処理設備方法
4日前
三菱重工業株式会社
積み付けパターン作成装置および方法
1日前
三菱重工業株式会社
制御装置、制御方法、及びプログラム
4日前
三菱重工業株式会社
風車翼補修装置、及び、風車翼補修方法
1日前
三菱重工業株式会社
計画システム、計画方法およびプログラム
今日
三菱重工業株式会社
計画システム、計画方法およびプログラム
今日
三菱重工業株式会社
帯電除去装置、帯電除去方法及びプログラム
2日前
三菱重工業株式会社
航空機の演算システム及び航空機の演算方法
7日前
三菱重工業株式会社
シミュレータシステム及びシミュレート方法
7日前
三菱重工業株式会社
吐出弁、昇圧ポンプ、及び水素供給システム
9日前
三菱重工業株式会社
モデル生成装置、モデル生成方法、及びプログラム
3日前
三菱重工業株式会社
ガスタービンの運転方法及びガスタービンの制御装置
2日前
三菱重工業株式会社
溶接条件設定装置、溶接条件設定方法及びプログラム
1日前
三菱重工業株式会社
水素生成システムおよび水素生成システムの制御方法
16日前
三菱重工業株式会社
水素取引支援装置、水素取引支援方法、及びプログラム
4日前
三菱重工業株式会社
液化ガス相変化検知システムおよび液化ガス相変化検知方法
11日前
三菱重工業株式会社
データシステム、データシステムの制御方法及びプログラム
4日前
三菱重工業株式会社
ボイラシステム及び発電プラント並びにボイラシステムの運転方法
11日前
三菱重工業株式会社
経路設定方法、移動制御方法、プログラム、経路設定装置、及び移動体
9日前
三菱重工業株式会社
造形条件設定装置、積層造形システム、造形条件設定方法及びプログラム
今日
三菱重工業株式会社
機械学習装置、機械学習方法、及び機械学習プログラム並びに経路生成装置
11日前
三菱重工業株式会社
垂直離着陸機の自動着陸システム、垂直離着陸機および垂直離着陸機の着陸制御方法
15日前
三菱重工業株式会社
ボイラ制御装置、ボイラ、発電プラント、ボイラ制御方法およびボイラ制御プログラム
14日前
三菱重工業株式会社
プラント制御装置、発電プラント、プラント制御方法、およびプラント制御プログラム
16日前
三菱重工業株式会社
ステータ磁石組付方法、ステータ製造方法、磁石案内治具、および、磁石組付治具ユニット
7日前
個人
タップ
3か月前
個人
加工機
3か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ