TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025121500
公報種別
公開特許公報(A)
公開日
2025-08-20
出願番号
2024016920
出願日
2024-02-07
発明の名称
経路設定方法、移動制御方法、プログラム、経路設定装置、及び移動体
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/644 20240101AFI20250813BHJP(制御;調整)
要約
【課題】移動体の動特性を考慮した経路を適切に設定する。
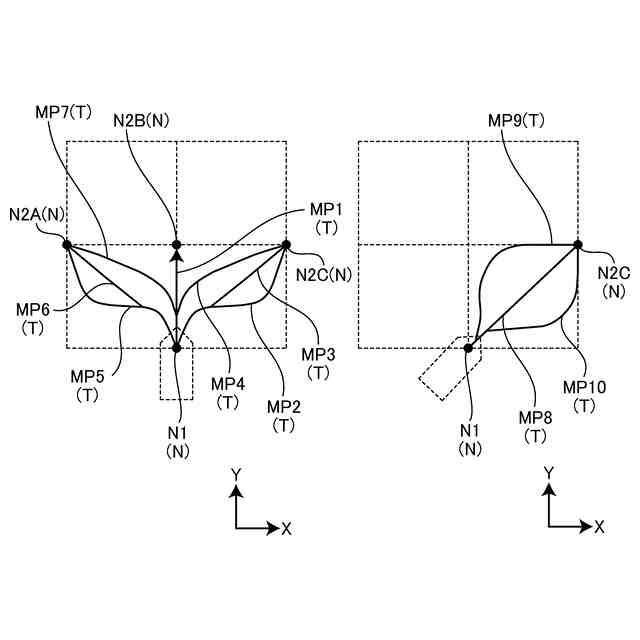
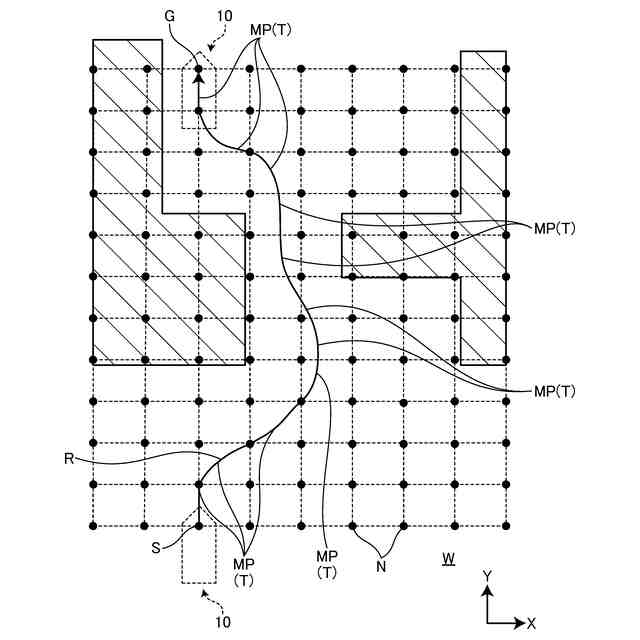
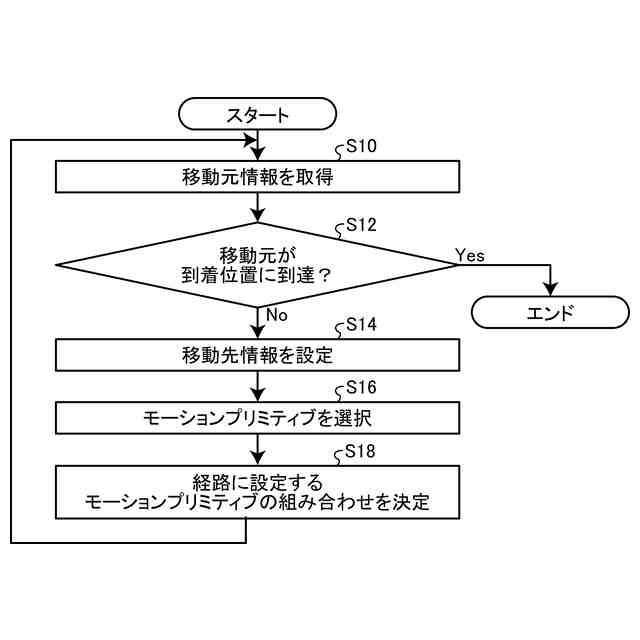
【解決手段】経路設定方法は、移動元の位置及び移動元における移動体の向きを示す移動元情報を取得するステップと、移動体の動特性を示す複数の運動方程式に基づいて算出されたモーションプリミティブを、移動元に基づいて選択するステップと、モーションプリミティブを組み合わせて、出発位置から到着位置までの移動体の経路を設定するステップと、を含む。
【選択図】図4
特許請求の範囲
【請求項1】
移動元の位置及び前記移動元における移動体の向きを示す移動元情報を取得するステップと、
前記移動体の動特性を示す複数の運動方程式に基づいて算出されたモーションプリミティブを、前記移動元に基づいて選択するステップと、
前記モーションプリミティブを組み合わせて、出発位置から到着位置までの前記移動体の経路を設定するステップと、
を含む、
経路設定方法。
続きを表示(約 1,100 文字)
【請求項2】
前記モーションプリミティブは、評価関数を最小とする最適化計算を用いて、移動元及び移動先の状態量に基づいて、算出されたものである、請求項1に記載の経路設定方法。
【請求項3】
前記モーションプリミティブを選択するステップにおいては、前記モーションプリミティブの移動先の位置が前記到着位置に到達するまで、前記モーションプリミティブの選択を繰り返し、
前記経路を設定するステップにおいては、取得したそれぞれの前記モーションプリミティブに示される軌跡を繋いで、前記経路を設定する、請求項1又は請求項2に記載の経路設定方法。
【請求項4】
前記モーションプリミティブを選択するステップにおいては、前記モーションプリミティブに示される軌跡が障害物と干渉するかを判定し、前記障害物に干渉しないと判定した前記モーションプリミティブを、前記経路を設定するための前記モーションプリミティブとして取得する、請求項1又は請求項2に記載の経路設定方法。
【請求項5】
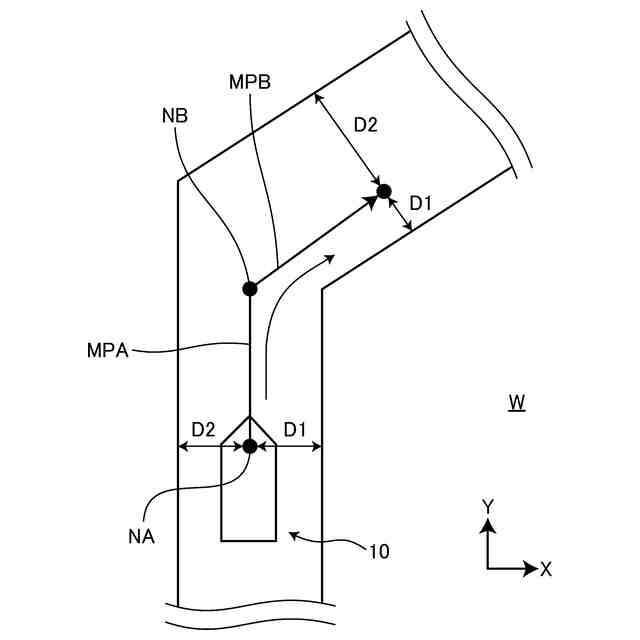
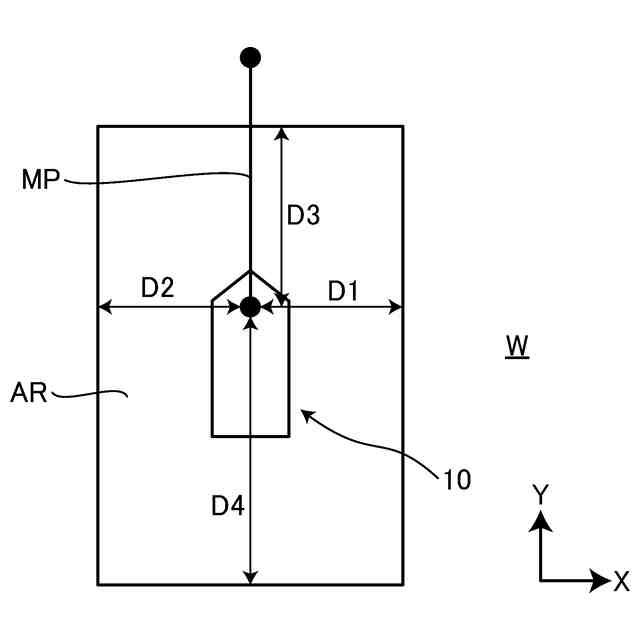
前記モーションプリミティブを選択するステップにおいては、前記モーションプリミティブの進行方向に基づいて、障害物と干渉するかを判定する判定基準を設定して、前記判定基準に基づいて、前記モーションプリミティブが前記障害物と干渉するかを判定する、請求項4に記載の経路設定方法。
【請求項6】
前記経路に基づいて前記移動体が移動している最中に、前記モーションプリミティブを取得し直すことで、前記経路を更新する、請求項1又は請求項2に記載の経路設定方法。
【請求項7】
前記移動体は、水上を移動する船舶、又は水中を移動する水中航行体である、請求項1又は請求項2に記載の経路設定方法。
【請求項8】
請求項1又は請求項2に記載の経路設定方法で設定された前記経路に基づいた制御入力により、前記移動体を移動させるステップを含む、
移動制御方法。
【請求項9】
前記移動体を移動させるステップにおいては、前記制御入力と、前記移動体の運転者からの操作とに基づいて、前記移動体を移動させる、請求項8に記載の移動制御方法。
【請求項10】
移動元の位置及び前記移動元における移動体の向きを示す移動元情報を取得するステップと、
前記移動体の動特性を示す複数の運動方程式に基づいて算出されたモーションプリミティブを、前記移動元に基づいて選択するステップと、
前記モーションプリミティブを組み合わせて、出発位置から到着位置までの前記移動体の経路を設定するステップと、
をコンピュータに実行させる、
プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、経路設定方法、移動制御方法、プログラム、経路設定装置、及び移動体に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
船舶、水中航行体、飛行体などの移動体の経路を、自動で設定する技術が知られている。例えば特許文献1には、船舶の位置及び船首方位に基づいて、計画経路を計算する旨が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-181301号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、計画経路を取得又は計画経路を計算する際に、移動体の動特性が考慮されていない。移動体の経路を自動で設定する際には、移動体の動特性を考慮した経路を適切に設定することが求められている。
【0005】
本開示は、上述した課題を解決するものであり、移動体の動特性を考慮した経路を適切に設定可能な経路設定方法、移動制御方法、プログラム、経路設定装置、及び移動体を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る経路設定方法は、移動元の位置及び前記移動元における移動体の向きを示す移動元情報を取得するステップと、前記移動体の動特性を示す複数の運動方程式に基づいて算出されたモーションプリミティブを、前記移動元に基づいて選択するステップと、前記モーションプリミティブを組み合わせて、出発位置から到着位置までの前記移動体の経路を設定するステップと、を含む。
【0007】
本開示に係る移動制御方法は、前記経路設定方法で設定された前記経路に基づいた制御入力により、前記移動体を移動させるステップを含む。
【0008】
本開示に係るプログラムは、移動元の位置及び前記移動元における移動体の向きを示す移動元情報を取得するステップと、前記移動体の動特性を示す複数の運動方程式に基づいて算出されたモーションプリミティブを、前記移動元に基づいて選択するステップと、前記モーションプリミティブを組み合わせて、出発位置から到着位置までの前記移動体の経路を設定するステップと、をコンピュータに実行させる。
【0009】
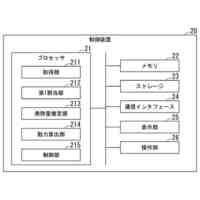
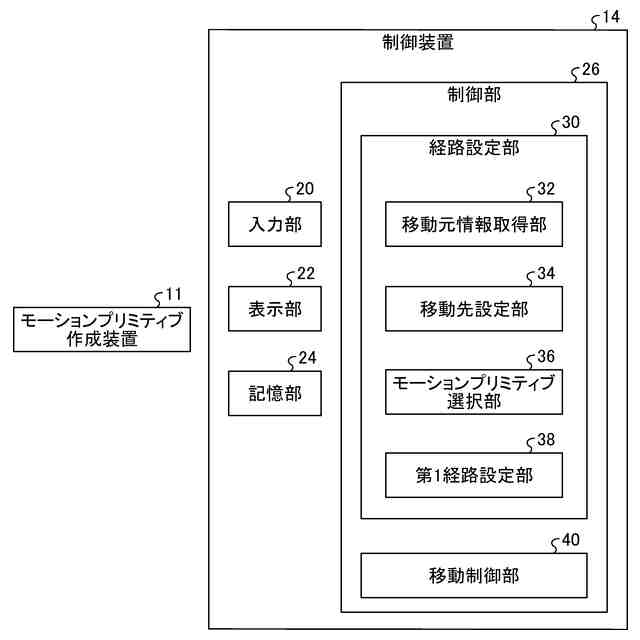
本開示に係る経路設定装置は、移動元の位置及び前記移動元における移動体の向きを示す移動元情報を取得する移動元情報取得部と、前記移動体の動特性を示す複数の運動方程式に基づいて算出されたモーションプリミティブを、前記移動元に基づいて選択するモーションプリミティブ選択部と、前記モーションプリミティブを組み合わせて、出発位置から到着位置までの前記移動体の経路を設定する第1経路設定部と、を含む。
【0010】
本開示に係る移動体は、前記経路設定装置を含む。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱重工業株式会社
ポンプ
13日前
三菱重工業株式会社
炉設備
1か月前
三菱重工業株式会社
復水器
27日前
三菱重工業株式会社
炭化炉
1か月前
三菱重工業株式会社
貯留システム
1か月前
三菱重工業株式会社
搬送システム
今日
三菱重工業株式会社
冷却システム
6日前
三菱重工業株式会社
水素製造装置
5日前
三菱重工業株式会社
位置計測方法
3日前
三菱重工業株式会社
フォークリフト
今日
三菱重工業株式会社
電動ターボ機械
17日前
三菱重工業株式会社
電動コンプレッサ装置
19日前
三菱重工業株式会社
対向ピストンエンジン
1か月前
三菱重工業株式会社
鋳造方法および鋳造品
28日前
三菱重工業株式会社
冷却装置及び冷却方法
1か月前
三菱重工業株式会社
推進薬プラントシステム
今日
三菱重工業株式会社
炭化炉及びその制御方法
3日前
三菱重工業株式会社
炭化炉及びその制御方法
1か月前
三菱重工業株式会社
電解セル、及び電解装置
13日前
三菱重工業株式会社
電解セル、及び電解装置
1か月前
三菱重工業株式会社
燃焼器及びガスタービン
26日前
三菱重工業株式会社
電解セル、及び電解装置
13日前
三菱重工業株式会社
高揚力装置および航空機
1か月前
三菱重工業株式会社
晶析システム及び晶析方法
1か月前
三菱重工業株式会社
軸封組品、及び蒸気タービン
1か月前
三菱重工業株式会社
計測装置、及び積層造形装置
1か月前
三菱重工業株式会社
電動機、及び電動機の製造方法
1か月前
三菱重工業株式会社
液浸冷却装置及びその運用方法
19日前
三菱重工業株式会社
制御システム、および制御方法
25日前
三菱重工業株式会社
信号処理装置及び信号処理方法
1か月前
三菱重工業株式会社
回転電機用回転子及び回転電機
1か月前
三菱重工業株式会社
蓋操作装置、細胞培養システム
24日前
三菱重工業株式会社
細胞培養設備、細胞培養システム
20日前
三菱重工業株式会社
蓄熱空調システムおよび制御方法
1か月前
三菱重工業株式会社
燃料噴射装置および往復動内燃機関
6日前
三菱重工業株式会社
制御装置、制御方法及びプログラム
25日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ