TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025132416
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024029959
出願日
2024-02-29
発明の名称
作業車両の制御システムおよび作業車両の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
9/20 20060101AFI20250903BHJP(水工;基礎;土砂の移送)
要約
【課題】作業対象からの反力の影響を抑えて掘削制御をする。
【解決手段】決定部は、作業車両の周囲の地形に係る地形データ、作業車両の姿勢データおよび作業機に掛かる負荷に係る作業機負荷データを含む作業車両データに基づいて、作業機の駆動量を決定する。
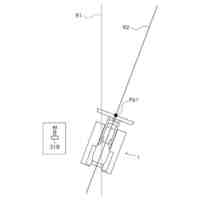
【選択図】図1
特許請求の範囲
【請求項1】
車体と、前記車体に支持され、土砂の掘削に用いられる作業機と、を備える作業車両の制御システムであって、
前記作業車両の周囲の地形に係る地形データ、前記作業車両の姿勢データおよび前記作業機に掛かる負荷に係る作業機負荷データを含む作業車両データに基づいて、前記作業機の駆動量を決定する決定部、
を備える作業車両の制御システム。
続きを表示(約 760 文字)
【請求項2】
前記決定部は、地形データおよび作業車両データから前記作業機の駆動量の値を出力するように学習された学習済モデルに、前記作業車両の周囲の地形に係る地形データおよび前記作業車両の作業車両データを入力することで前記作業機の駆動量を決定する、
請求項1に記載の作業車両の制御システム。
【請求項3】
前記学習済モデルは、掘削完了時の掘削量が多いほど高く、かつ掘削中の車速が低いほど低くなる報酬に基づく強化学習によって学習された、
請求項2に記載の作業車両の制御システム。
【請求項4】
前記作業機負荷データは、前記作業車両の車速に係る値を含む、
請求項1から請求項3の何れか1項に記載の作業車両の制御システム。
【請求項5】
前記作業車両データは、
前記作業機による掘削の開始位置から終了位置までの距離に係る目標距離データと、
前記開始位置から前記作業機の位置までの距離に係る現在距離データと、
を含む、
請求項1から請求項3の何れか1項に記載の作業車両の制御システム。
【請求項6】
前記作業車両データは、前記作業機による掘削量に関する掘削量データを含む、
請求項1から請求項3の何れか1項に記載の作業車両の制御システム。
【請求項7】
車体と、前記車体に支持され、土砂の掘削に用いられる作業機と、を備える作業車両の制御方法であって、
前記作業車両の周囲の地形に係る地形データ、前記作業車両の姿勢データおよび前記作業機に掛かる負荷に係る作業機負荷データを含む作業車両データに基づいて、前記作業機の駆動量を決定するステップ、
を備える作業車両の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業車両の制御システムおよび作業車両の制御方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、ブレードの刃先を設計面に追従させる作業車両が開示されている。特許文献1に開示された技術によれば、制御装置は、GNSS(Global Navigation Satellite System)を利用して作業車両の位置を特定し、特定した位置に基づいてブレードの目標高さを決定する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2015/083469号
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業車両は、作業を行いながら走行前進することがある。作業車両は、作業対象からの反力を受けて走行することになる。作業対象の地質によってはこの反力の影響によって、作業車両のストールやスリップが生じることがある。ストールやスリップの有無にかかわらず、ブレードの刃先を忠実に設計面に追従させると、作業車両の車速が低下し、作業効率が低下する可能性がある。
本開示の目的は、作業対象からの反力の影響を抑えて掘削制御をすることができる作業車両の制御システムおよび作業車両の制御方法を提供することにある。
【課題を解決するための手段】
【0005】
本開示の一態様によれば、作業車両の制御システムは、車体と、前記車体に支持され、土砂の掘削に用いられる作業機と、を備える作業車両の制御システムであって、前記作業車両の周囲の地形に係る地形データ、前記作業車両の姿勢データおよび前記作業機に掛かる負荷に係る作業機負荷データを含む作業車両データに基づいて、前記作業機の駆動量を決定する決定部を備える。
【発明の効果】
【0006】
上記態様によれば、作業車両の制御システムは、作業対象からの反力の影響を抑えて掘削制御をすることができる。
【図面の簡単な説明】
【0007】
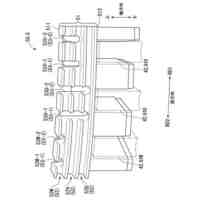
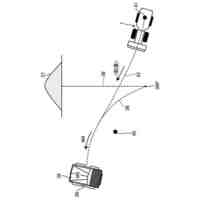
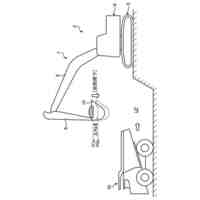
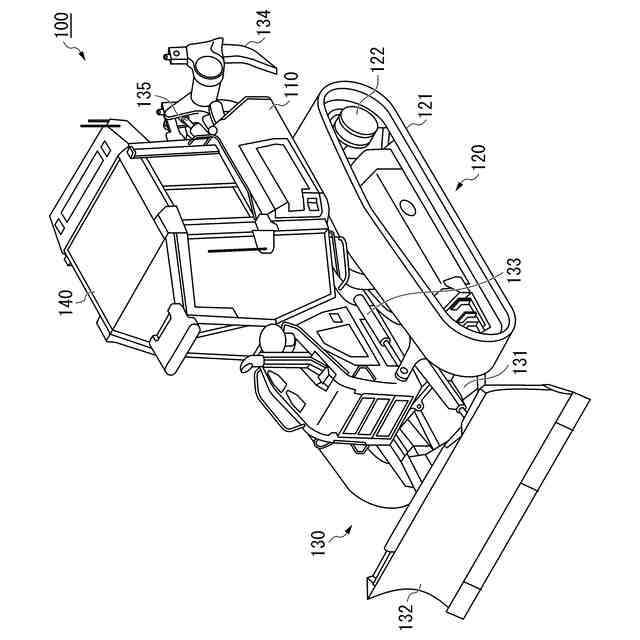
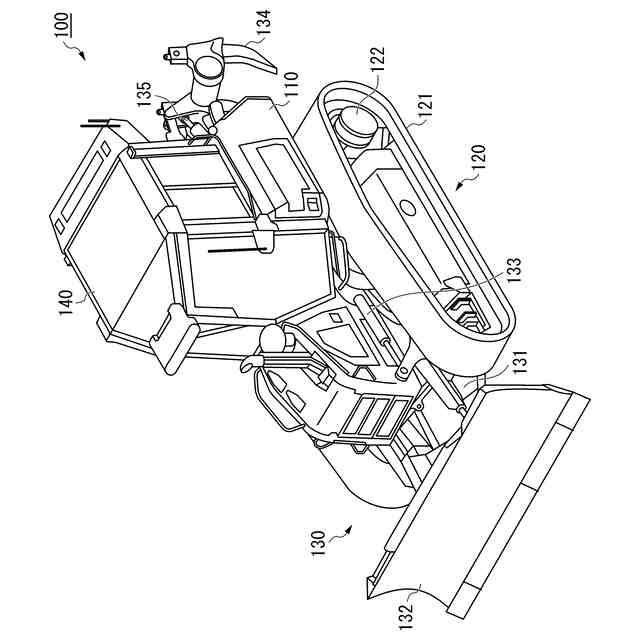
第1の実施形態に係る作業車両の側面図である。
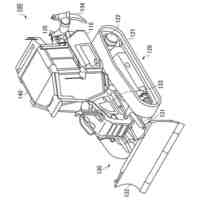
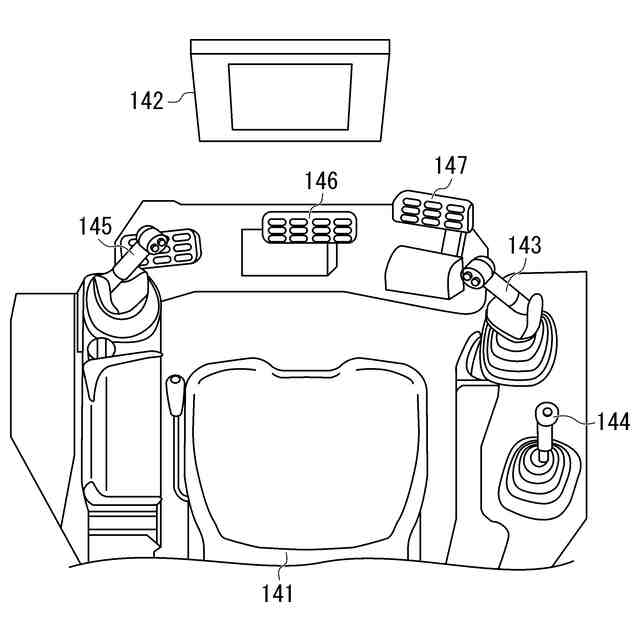
第1の実施形態に係る運転室の内部の構成を示す図である。
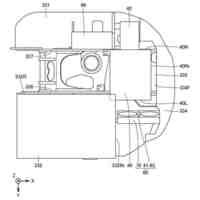
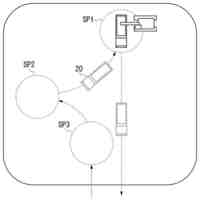
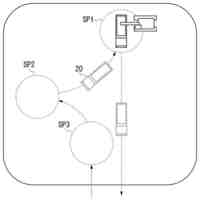
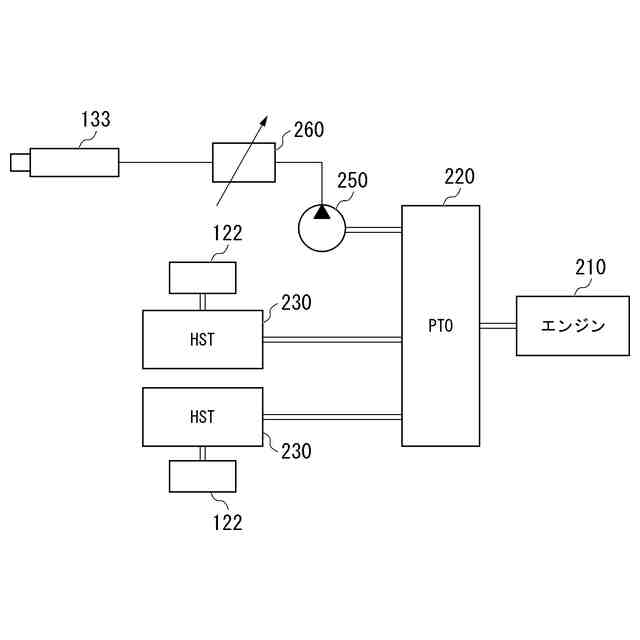
第1の実施形態に係る作業車両の動力系を示す模式図である。
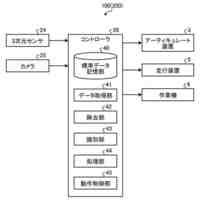
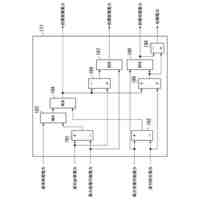
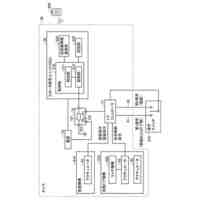
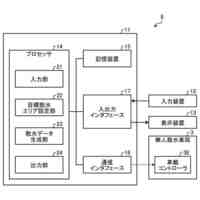
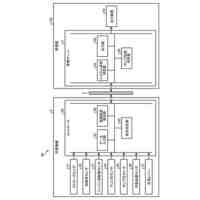
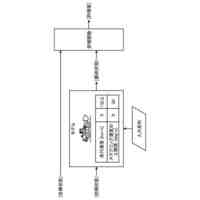
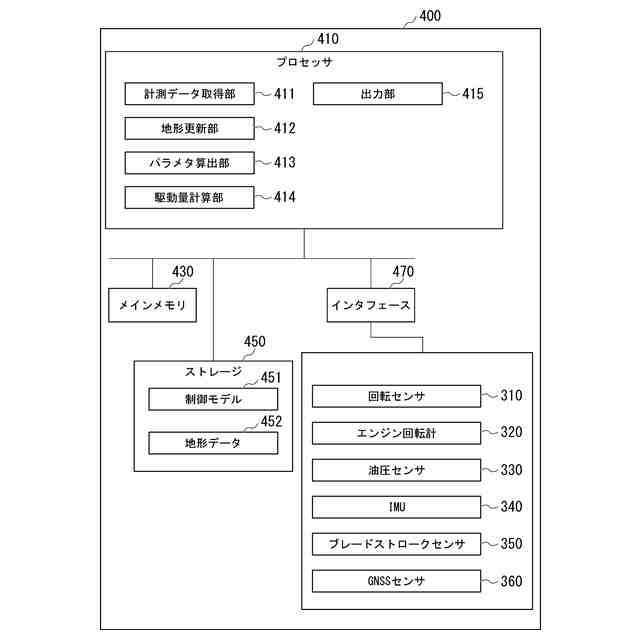
第1の実施形態に係る作業車両の計測系および制御装置の構成を示す図である。
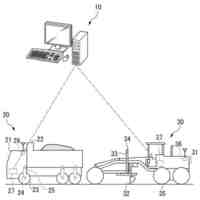
第1の実施形態に係る学習装置の構成を示す図である。
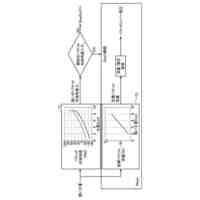
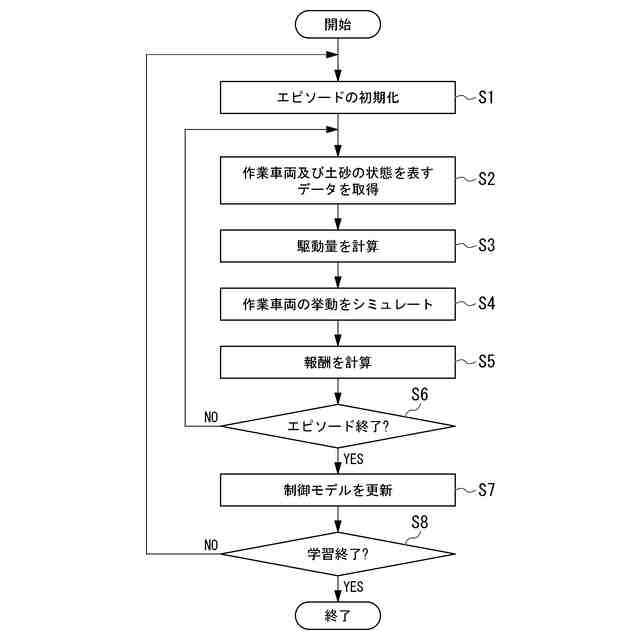
第1の実施形態に係る学習装置による制御モデルの学習処理を示すフローチャートである。
第1の実施形態に係る位置出力方法を示すフローチャートである。
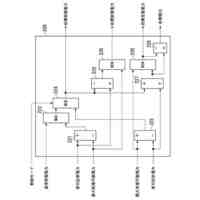
第2の実施形態に係る作業車両の制御装置の構成を示す図である。
【発明を実施するための形態】
【0008】
〈第1の実施形態〉
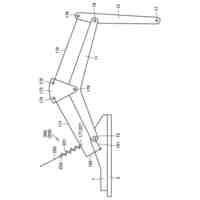
以下、図面を参照しながら実施形態について詳しく説明する。図1は、第1の実施形態に係る作業車両の側面図である。
第1の実施形態に係る作業車両100は、例えばブルドーザである。作業車両100は、車体110、走行装置120、作業機130、運転室140を備える。第1の実施形態に係る作業車両100は、作業機130の自動制御機能を有する。自動制御機能が有効になっている場合、オペレータが車体を走行させると、作業車両100は自動的に作業機130を駆動させて土砂の掘削を行う。
【0009】
走行装置120は、車体110の下部に設けられる。走行装置120は、クローラ121、スプロケット122を一対備える。一対のクローラ121は、ぞれぞれ車体110の左と右とに設けられる。スプロケット122の駆動によってクローラ121が回転することで、作業車両100が走行する。
【0010】
作業機130は、土砂等の掘削対象の掘削および運搬に用いられる。作業機130は、リフトフレーム131、ブレード132、ブレードリフトシリンダ133、リッパ134、およびリッパリフトシリンダ135を備える。ブレード132は車体110の前方に配置される。リッパ134は車体110の後方に配置される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
モータ
4日前
株式会社小松製作所
モータ
4日前
株式会社小松製作所
作業機械
1か月前
株式会社小松製作所
作業機械
5日前
株式会社小松製作所
作業機械
12日前
株式会社小松製作所
電装部品
1か月前
株式会社小松製作所
路面整備システム
4日前
株式会社小松製作所
プラネタリギヤ機構
3日前
株式会社小松製作所
回転電機及び作業機械
1か月前
株式会社小松製作所
作業機械の履帯式走行装置
1か月前
株式会社小松製作所
識別システム及び識別方法
1か月前
株式会社小松製作所
モータ及びモータの製造方法
4日前
株式会社小松製作所
ロータ、回転電機及び作業機械
1か月前
株式会社小松製作所
システム、作業車両および方法
5日前
株式会社小松製作所
システム、作業車両および方法
5日前
株式会社小松製作所
ステータ、回転電機及び作業機械
1か月前
株式会社小松製作所
作業機械、及び、トランスファ装置
17日前
株式会社小松製作所
作業機械および作業機械の制御方法
1か月前
株式会社小松製作所
表示システム、表示方法及び作業機械
18日前
株式会社小松製作所
表示システム、情報端末、及び表示方法
1か月前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
11日前
株式会社小松製作所
作業機械用ファイナルドライブおよび作業機械
18日前
株式会社小松製作所
モータ、モータの製造方法及びインシュレータ
4日前
株式会社小松製作所
作業内容推定システムおよび作業内容推定方法
4日前
株式会社小松製作所
産業機械の熱変位補正装置及び熱変位補正方法
1か月前
株式会社小松製作所
作業機械の制御システム及び作業機械の制御方法
1か月前
株式会社小松製作所
作業機械の計測システム及び作業機械の計測方法
1か月前
株式会社小松製作所
作業現場の管理システム及び作業現場の管理方法
4日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
19日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
26日前
株式会社小松製作所
作業車両の制御システムおよび作業車両の制御方法
4日前
株式会社小松製作所
作業機械の表示制御システムおよび作業内容の表示方法
4日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
12日前
株式会社小松製作所
作業機械の制御システム、作業機械、及び作業機械の制御方法
1か月前
株式会社小松製作所
作業機械のカメラシステムおよびカメラパラメータの校正方法
4日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
13日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ