TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025125743
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024021868
出願日
2024-02-16
発明の名称
作業機械、及び、トランスファ装置
出願人
株式会社小松製作所
代理人
弁理士法人新樹グローバル・アイピー
主分類
F16H
57/021 20120101AFI20250821BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】トランスファ装置における入力軸のミスアライメントを抑える。
【解決手段】トランスファ装置は、入力軸と、遊星歯車機構と、ドライブギアと、ドリブンギアと、出力軸と、第1シャフト軸受と、第2シャフト軸受と、第1ボス軸受と、第2ボス軸受と、トランスファケースとを備える。入力軸は、第1軸端部と第2軸端部とを含む。ドライブギアは、第1ボス端部と第2ボス端部とを含む。トランスファケースは、第1シャフト支持部と、第2シャフト支持部と、第1ボス支持部と、第2ボス支持部とを含む。第1シャフト支持部は、第1シャフト軸受を介して入力軸を支持する。第2シャフト支持部は、第2シャフト軸受を介して入力軸を支持する。第1ボス支持部は、第1ボス軸受を介してドライブギアを支持する。第2ボス支持部は、第2ボス軸受を介してドライブギアを支持する。
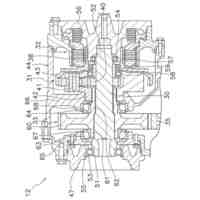
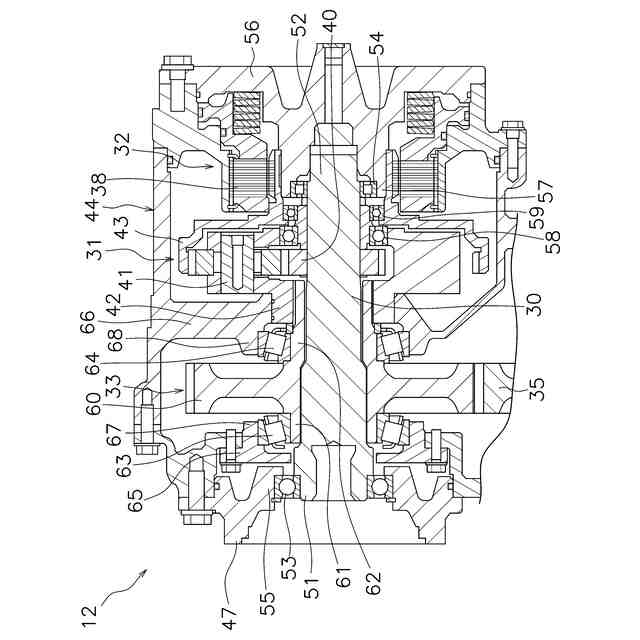
【選択図】図6
特許請求の範囲
【請求項1】
パワートレインと、
アクスルと、
トランスファ装置と、
を備え、
前記トランスファ装置は、
前記パワートレインに接続される入力軸であって、第1軸端部と、前記入力軸の軸線方向において前記第1軸端部と反対に位置する第2軸端部とを含む入力軸と、
前記入力軸と同軸に配置され、前記入力軸に接続される遊星歯車機構と、
第1ボス端部と、前記軸線方向において前記第1ボス端部と反対に位置する第2ボス端部とを含み、前記入力軸と同軸に配置され、前記入力軸に対して回転可能であり、前記遊星歯車機構に接続されるドライブギアと、
前記ドライブギアと噛み合うドリブンギアと、
前記ドリブンギアと同軸に配置され、前記ドリブンギアに接続され、前記アクスルに接続される出力軸と、
前記第1軸端部に取り付けられる第1シャフト軸受と、
前記第2軸端部に取り付けられる第2シャフト軸受と、
前記第1ボス端部に取り付けられる第1ボス軸受と、
前記第2ボス端部に取り付けられる第2ボス軸受と、
前記入力軸と、前記遊星歯車機構と、前記ドライブギアと、前記ドリブンギアと、前記出力軸とを収容し、前記第1シャフト軸受を介して前記入力軸を支持する第1シャフト支持部と、前記第2シャフト軸受を介して前記入力軸を支持する第2シャフト支持部と、前記第1ボス軸受を介して前記ドライブギアを支持する第1ボス支持部と、前記第2ボス軸受を介して前記ドライブギアを支持する第2ボス支持部とを含むトランスファケースと、
を備える作業機械。
続きを表示(約 1,700 文字)
【請求項2】
前記入力軸は、前記ドライブギアを通って前記軸線方向に延びており、
前記ドライブギアは、前記軸線方向において前記第1シャフト軸受と前記遊星歯車機構との間に配置される、
請求項1に記載の作業機械。
【請求項3】
前記第1ボス軸受と前記第2ボス軸受とは、前記軸線方向において前記第1シャフト軸受と前記遊星歯車機構との間に配置される、
請求項2に記載の作業機械。
【請求項4】
前記入力軸は、前記ドライブギアと前記遊星歯車機構とを通って前記軸線方向に延びており、
前記ドライブギアと前記遊星歯車機構とは、前記軸線方向において前記第1シャフト軸受と前記第2シャフト軸受との間に配置される、
請求項1に記載の作業機械。
【請求項5】
前記トランスファケースは、前記トランスファケースの内面から延びる第1壁部を含み、
前記第1ボス支持部は、前記第1壁部に設けられる、
請求項1に記載の作業機械。
【請求項6】
前記トランスファケースは、前記トランスファケースの内面から延びる第2壁部を含み、
前記第2ボス支持部は、前記第2壁部に設けられる、
請求項5に記載の作業機械。
【請求項7】
前記トランスファケースは、
前記トランスファケースの前面に設けられる前壁部と、
前記トランスファケースの後面に設けられる後壁部と、
を含み、
前記第1シャフト支持部は、前記前壁部に設けられ、
前記第2シャフト支持部は、前記後壁部に設けられる、
請求項1に記載の作業機械。
【請求項8】
前記遊星歯車機構は、
前記入力軸に接続され、前記入力軸と一体的に回転するサンギアと、
前記サンギアと噛み合うプラネタリギアと、
前記プラネタリギアに接続され、前記プラネタリギアと共に前記入力軸回りに回転し、前記ドライブギアに接続されるキャリアと、
を含む、
請求項1に記載の作業機械。
【請求項9】
前記遊星歯車機構は、前記プラネタリギアと噛み合うリングギアをさらに含み、
前記リングギアと前記トランスファケースとに接続されるクラッチをさらに備え、
前記クラッチは、前記第2シャフト支持部の外周側に配置される、
請求項8に記載の作業機械。
【請求項10】
第1軸端部と第2軸端部とを含む入力軸であって、前記第2軸端部は、前記入力軸の軸線方向において前記第1軸端部と反対に位置する、入力軸と、
前記入力軸と同軸に配置され、前記入力軸に接続される遊星歯車機構と、
第1ボス端部と、前記軸線方向において前記第1ボス端部と反対に位置する第2ボス端部とを含み、前記入力軸と同軸に配置され、前記入力軸に対して回転可能であり、前記遊星歯車機構に接続されるドライブギアと、
前記ドライブギアと噛み合うドリブンギアと、
前記ドリブンギアと同軸に配置され、前記ドリブンギアに接続される出力軸と、
前記第1軸端部に取り付けられる第1シャフト軸受と、
前記第2軸端部に取り付けられる第2シャフト軸受と、
前記第1ボス端部に取り付けられる第1ボス軸受と、
前記第2ボス端部に取り付けられる第2ボス軸受と、
前記入力軸と、前記遊星歯車機構と、前記ドライブギアと、前記ドリブンギアと、前記出力軸とを収容し、前記第1シャフト軸受を介して前記入力軸を支持する第1シャフト支持部と、前記第2シャフト軸受を介して前記入力軸を支持する第2シャフト支持部と、前記第1ボス軸受を介して前記ドライブギアを支持する第1ボス支持部と、前記第2ボス軸受を介して前記ドライブギアを支持する第2ボス支持部とを含むトランスファケースと、
を備えるトランスファ装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械、及び、トランスファ装置に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
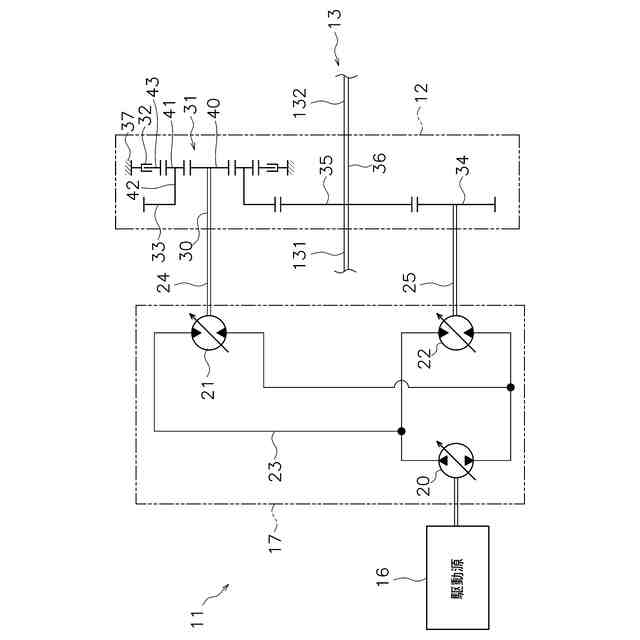
作業機械には、トランスファ装置を備えるものがある(例えば、特許文献1参照)。トランスファ装置は、パワートレインからの駆動力をアクスルに伝達する。また、トランスファ装置には、入力軸と、遊星歯車機構と、ドライブギアと、ドリブンギアと、出力軸とを備えるものがある。入力軸は、遊星歯車機構を介して、ドライブギアに接続されている。ドライブギアは、ドリブンギアと噛み合う。ドリブンギアは、出力軸に接続されている。パワートレインからの駆動力は、入力軸から、遊星歯車機構と、ドライブギアと、ドリブンギアとを介して、出力軸に伝達される。
【先行技術文献】
【特許文献】
【0003】
特許第5113949号
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したトランスファ装置では、入力軸の端部が、遊星歯車機構を介して、ドライブギアに支持されるものがある。そのようなトランスファ装置では、ドリブンギアからの反力により、ドライブギアが撓んだ場合、入力軸の中心の位置がズレてミスアライメントが生じる可能性がある。本開示の目的は、トランスファ装置における入力軸のミスアライメントを抑えることにある。
【課題を解決するための手段】
【0005】
本開示の一態様に係る作業機械は、パワートレインと、アクスルと、トランスファ装置とを備える。トランスファ装置は、入力軸と、遊星歯車機構と、ドライブギアと、ドリブンギアと、出力軸と、第1シャフト軸受と、第2シャフト軸受と、第1ボス軸受と、第2ボス軸受と、トランスファケースとを備える。入力軸は、第1軸端部と第2軸端部とを含む。第2軸端部は、入力軸の軸線方向において、第1軸端部と反対に位置する。入力軸は、パワートレインに接続される。遊星歯車機構は、入力軸と同軸に配置される。遊星歯車機構は、入力軸に接続される。ドライブギアは、第1ボス端部と第2ボス端部とを含む。第2ボス端部は、軸線方向において第1ボス端部と反対に位置する。ドライブギアは、入力軸と同軸に配置される。ドライブギアは、入力軸に対して回転可能である。ドライブギアは、遊星歯車機構に接続される。ドリブンギアは、ドライブギアと噛み合う。出力軸は、ドリブンギアと同軸に配置される。出力軸は、ドリブンギアに接続される。出力軸は、アクスルに接続される。第1シャフト軸受は、第1軸端部に取り付けられる。第2シャフト軸受は、第2軸端部に取り付けられる。第1ボス軸受は、第1ボス端部に取り付けられる。第2ボス軸受は、第2ボス端部に取り付けられる。トランスファケースは、入力軸と、遊星歯車機構と、ドライブギアと、ドリブンギアと、出力軸とを収容する。トランスファケースは、第1シャフト支持部と、第2シャフト支持部と、第1ボス支持部と、第2ボス支持部とを含む。第1シャフト支持部は、第1シャフト軸受を介して入力軸を支持する。第2シャフト支持部は、第2シャフト軸受を介して入力軸を支持する。第1ボス支持部は、第1ボス軸受を介してドライブギアを支持する。第2ボス支持部は、第2ボス軸受を介してドライブギアを支持する。
【0006】
本開示の他の態様に係るトランスファ装置は、入力軸と、遊星歯車機構と、ドライブギアと、ドリブンギアと、出力軸と、第1シャフト軸受と、第2シャフト軸受と、第1ボス軸受と、第2ボス軸受と、トランスファケースとを備える。入力軸は、第1軸端部と第2軸端部とを含む。第2軸端部は、入力軸の軸線方向において、第1軸端部と反対に位置する。遊星歯車機構は、入力軸と同軸に配置される。遊星歯車機構は、入力軸に接続される。ドライブギアは、第1ボス端部と第2ボス端部とを含む。第2ボス端部は、軸線方向において第1ボス端部と反対に位置する。ドライブギアは、入力軸と同軸に配置される。ドライブギアは、入力軸に対して回転可能である。ドライブギアは、遊星歯車機構に接続される。ドリブンギアは、ドライブギアと噛み合う。出力軸は、ドリブンギアと同軸に配置される。出力軸は、ドリブンギアに接続される。第1シャフト軸受は、第1軸端部に取り付けられる。第2シャフト軸受は、第2軸端部に取り付けられる。第1ボス軸受は、第1ボス端部に取り付けられる。第2ボス軸受は、第2ボス端部に取り付けられる。トランスファケースは、入力軸と、遊星歯車機構と、ドライブギアと、ドリブンギアと、出力軸とを収容する。トランスファケースは、第1シャフト支持部と、第2シャフト支持部と、第1ボス支持部と、第2ボス支持部とを含む。第1シャフト支持部は、第1シャフト軸受を介して入力軸を支持する。第2シャフト支持部は、第2シャフト軸受を介して入力軸を支持する。第1ボス支持部は、第1ボス軸受を介してドライブギアを支持する。第2ボス支持部は、第2ボス軸受を介してドライブギアを支持する。
【発明の効果】
【0007】
本開示によれば、トランスファ装置では、入力軸の両軸端部が、それぞれ軸受を介して、トランスファケースに支持される。また、ドライブギアの両ボス端部がそれぞれ軸受を介して、トランスファケースに支持される。それにより、入力軸のミスアライメントが抑えられる。
【図面の簡単な説明】
【0008】
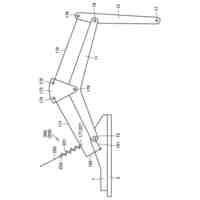
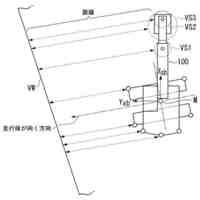
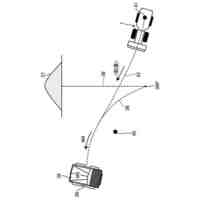
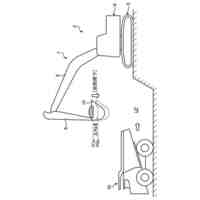
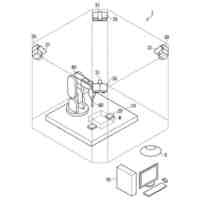
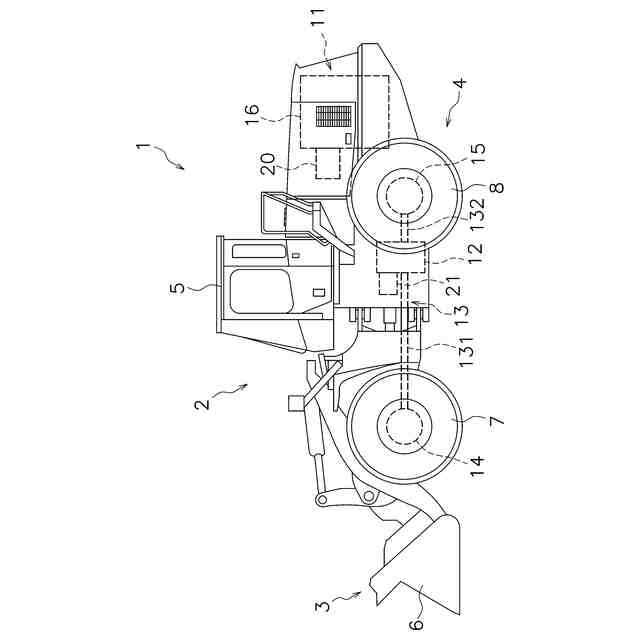
実施形態に係る作業機械の側面図である。
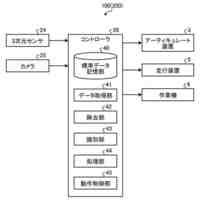
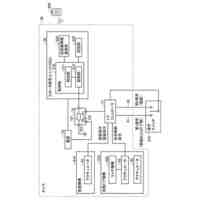
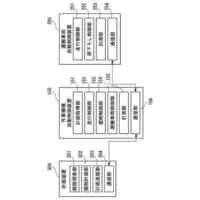
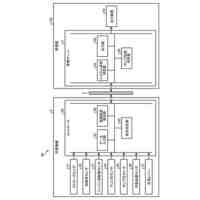
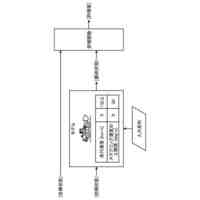
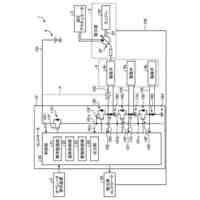
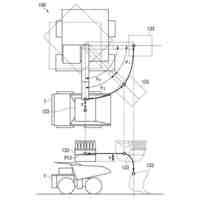
作業機械の駆動システムの構成を示すブロック図である。
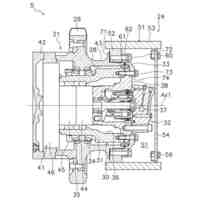
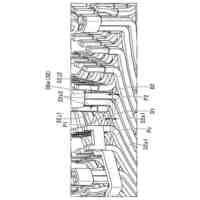
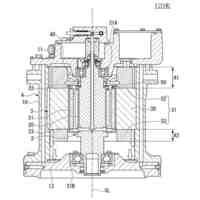
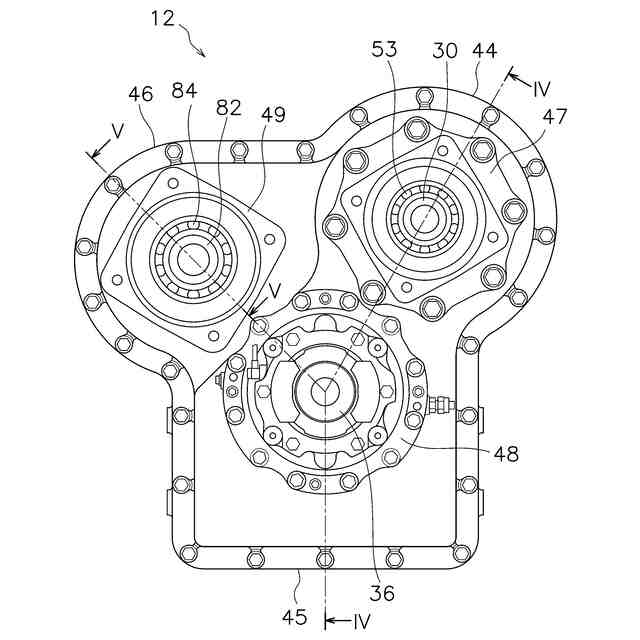
トランスファ装置の正面図である。
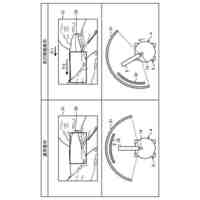
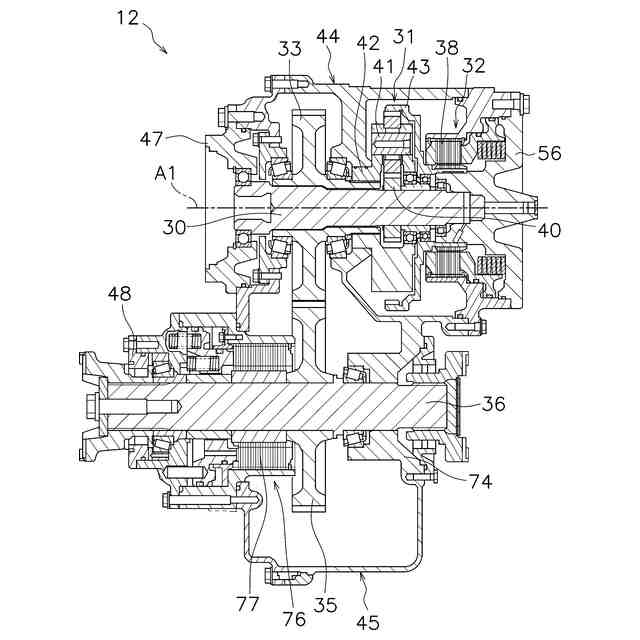
図3におけるトランスファ装置のIV-IV断面図である。
図3におけるトランスファ装置のV-V断面図である。
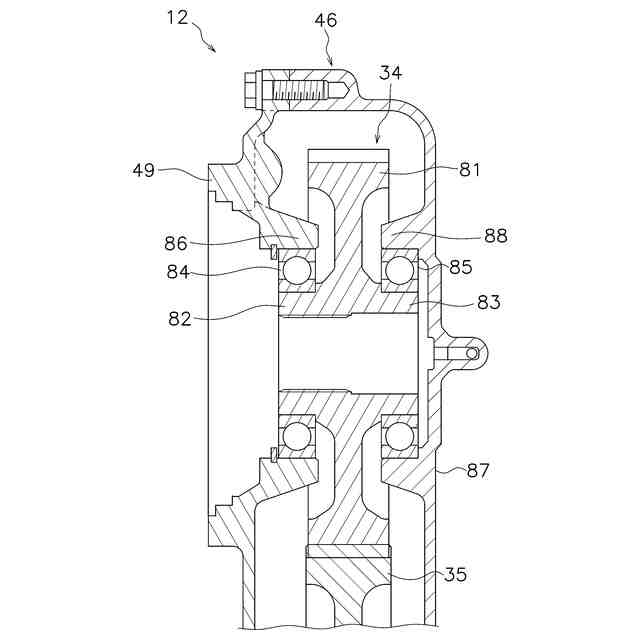
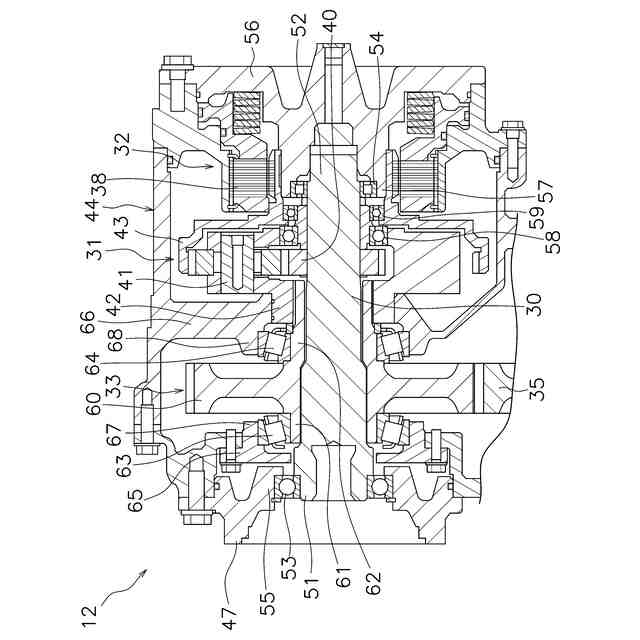
第1ケース部内の構成を示す拡大断面図である。
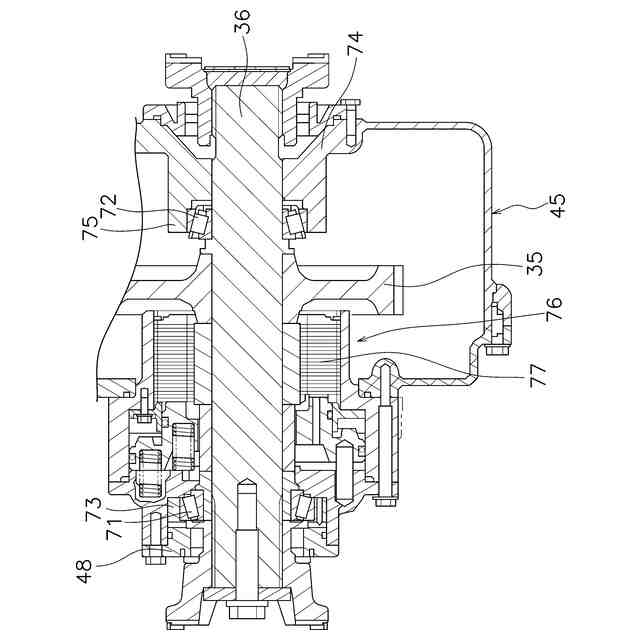
第2ケース部内の構成を示す拡大断面図である。
【発明を実施するための形態】
【0009】
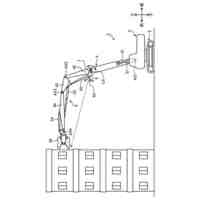
以下、図面を参照して、本発明の実施形態について説明する。図1は、本開示の実施形態に係る作業機械1の側面図である。本実施形態に係る作業機械1は、ホイールローダである。図1に示すように、作業機械1は、車体2と、作業機3と、走行装置4とを備えている。
【0010】
車体2は、運転室5を含む。作業機3は、車体2に対して動作可能に接続されている。作業機3は、例えばバケット6を含む。作業機3は、掘削等の作業に用いられる。走行装置4は、車体2に取り付けられている。走行装置4は、作業機械1を走行させる。走行装置4は、前輪7と後輪8とを含む。前輪7と後輪8とは、車体2に回転可能に支持されている。なお、図面においては、左右の前輪7のうち左側のもののみが図示されている。図面においては、左右の後輪8のうち左側のもののみが図示されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業機械
2か月前
株式会社小松製作所
作業機械
1か月前
株式会社小松製作所
作業機械
1か月前
株式会社小松製作所
電装部品
28日前
株式会社小松製作所
回転電機及び作業機械
19日前
株式会社小松製作所
識別システム及び識別方法
19日前
株式会社小松製作所
作業機械の履帯式走行装置
1か月前
株式会社小松製作所
制御システムおよび作業機械
1か月前
株式会社小松製作所
ロータ、回転電機及び作業機械
24日前
株式会社小松製作所
ステータ、回転電機及び作業機械
1か月前
株式会社小松製作所
システム、方法およびプログラム
1か月前
株式会社小松製作所
ステータ、回転電機及び作業機械
19日前
株式会社小松製作所
作業機械および作業機械の制御方法
25日前
株式会社小松製作所
作業機械および作業機械の制御方法
1か月前
株式会社小松製作所
作業機械、及び、トランスファ装置
4日前
株式会社小松製作所
表示システム、表示方法及び作業機械
5日前
株式会社小松製作所
表示システム、情報端末、及び表示方法
19日前
株式会社小松製作所
作業機械、散水装置、及び散水システム
1か月前
株式会社小松製作所
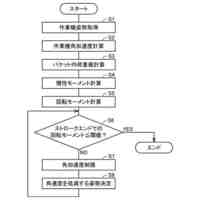
産業機械の熱変位補正装置及び熱変位補正方法
20日前
株式会社小松製作所
計画装置、作業機械、運搬車両および計画方法
1か月前
株式会社小松製作所
作業機械用ファイナルドライブおよび作業機械
5日前
株式会社小松製作所
作業機械の制御システム及び作業機械の制御方法
27日前
株式会社小松製作所
作業機械の計測システム及び作業機械の計測方法
26日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
13日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
6日前
株式会社小松製作所
加工機械、加工機械の制御装置および加工機械の制御方法
1か月前
株式会社小松製作所
作業機械の遠隔操作システム及び作業機械の遠隔操作方法
1か月前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
1か月前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
1か月前
株式会社小松製作所
作業機械、及び、作業機械用の電動パワートレインユニット
1か月前
株式会社小松製作所
作業機械の制御システム、作業機械、及び作業機械の制御方法
19日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
今日
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
今日
株式会社小松製作所
作業機械及び作業機械の制御方法
1か月前
株式会社小松製作所
積込機械の制御装置及び制御方法
1か月前
株式会社小松製作所
作業機械の遠隔操作システム、作業機械の遠隔コントローラ、及び作業機械の遠隔操作方法
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ