TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025114922
公報種別
公開特許公報(A)
公開日
2025-08-06
出願番号
2024009165
出願日
2024-01-25
発明の名称
作業機械の計測システム及び作業機械の計測方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
3/43 20060101AFI20250730BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機の姿勢を検出する姿勢センサの取り付け姿勢誤差を計測すること。
【解決手段】作業機械の計測システムは、作業機械の作業機に取り付けられ、作業機に規定された作業機座標系の3つの基準軸のそれぞれを中心とする回転方向の姿勢を検出する姿勢センサと、作業機を第1姿勢から第2姿勢に変化させたときの姿勢センサにより検出された検出データに基づいて検出回転軸を算出し、検出回転軸と指標軸とに基づいて、姿勢センサの取り付け姿勢誤差を算出する算出部と、を備える。
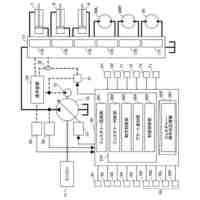
【選択図】図3
特許請求の範囲
【請求項1】
作業機械の作業機に取り付けられ、前記作業機に規定された作業機座標系の3つの基準軸のそれぞれを中心とする回転方向の姿勢を検出する姿勢センサと、
前記作業機を第1姿勢から第2姿勢に変化させたときの前記姿勢センサにより検出された検出データに基づいて検出回転軸を算出し、前記検出回転軸と指標軸とに基づいて、前記姿勢センサの取り付け姿勢誤差を算出する算出部と、を備える、
作業機械の計測システム。
続きを表示(約 970 文字)
【請求項2】
前記作業機は、3つの前記基準軸のうち第1基準軸に平行な作業機回転軸を中心に回動するように操作されることにより、前記第1姿勢から前記第2姿勢に変化する、
請求項1に記載の作業機械の計測システム。
【請求項3】
前記算出部は、前記取り付け姿勢誤差として、前記指標軸と前記検出回転軸との角度差を算出する、
請求項2に記載の作業機械の計測システム。
【請求項4】
前記作業機は、ブームを含み、
前記姿勢センサは、前記ブームに取り付けられる、
請求項1に記載の作業機械の計測システム。
【請求項5】
前記作業機は、アームを含み、
前記姿勢センサは、前記アームに取り付けられる、
請求項1に記載の作業機械の計測システム。
【請求項6】
前記算出部により算出された取り付け姿勢誤差に基づいて、前記姿勢センサの検出データを補正する補正部を備える、
請求項1に記載の作業機械の計測システム。
【請求項7】
前記作業機は、ブームと、前記ブームに連結されるアームと、前記アームに連結されるバケットと、を含み、
前記姿勢センサは、前記ブーム及び前記アームのそれぞれに取り付けられ、
前記補正部により補正された前記検出データに基づいて、目標施工面に沿って前記バケットが移動するように、前記作業機の動作を制御する制御部を備える、
請求項6に記載の作業機械の計測システム。
【請求項8】
前記姿勢センサは、慣性計測装置を含む、
請求項1に記載の作業機械の計測システム。
【請求項9】
作業機械の作業機に、前記作業機に規定された作業機座標系の3つの基準軸のそれぞれを中心とする回転方向の姿勢を検出する姿勢センサが取り付けられた状態で、前記作業機を第1姿勢から第2姿勢に変化させることと、
前記作業機を第1姿勢から第2姿勢に変化させたときの前記姿勢センサにより検出された検出データに基づいて検出回転軸を算出し、前記検出回転軸と指標軸とに基づいて、前記姿勢センサの取り付け姿勢誤差を算出することと、を含む、
作業機械の計測方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の計測システム及び作業機械の計測方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
作業機械に係る技術分野において、目標施工面に基づいて掘削対象を掘削する技術が知られている。目標施工面に基づいて掘削対象を掘削する技術として、目標施工面と作業機との相対位置を示すガイダンス画像を作業機械のオペレータに提示するマシンガイダンス技術と、目標施工面に従って作業機が動作するようにオペレータの操作をアシスト制御するマシンコントロール技術とが知られている。また、作業機械に係る技術分野において、特許文献1に開示されているような、慣性計測装置(IMU:Inertial Measurement Unit)を備える作業機械が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2021-067498号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
目標施工面に基づいて掘削対象を掘削する場合、作業機の姿勢を検出する必要がある。作業機に取り付けられた姿勢センサを用いて作業機の姿勢を検出する場合、姿勢センサの取り付け姿勢誤差があると、目標施工面に基づいて掘削対象を掘削することが困難となる可能性がある。
【0005】
本開示は、作業機の姿勢を検出する姿勢センサの取り付け姿勢誤差を計測することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、作業機械の作業機に取り付けられ、作業機に規定された作業機座標系の3つの基準軸のそれぞれを中心とする回転方向の姿勢を検出する姿勢センサと、作業機を第1姿勢から第2姿勢に変化させたときの姿勢センサにより検出された検出データに基づいて検出回転軸を算出し、前記検出データと前記検出回転軸と指標軸とに基づいて、姿勢センサの取り付け姿勢誤差を算出する算出部と、を備える、作業機械の計測システムが提供される。
【発明の効果】
【0007】
本開示によれば、作業機の姿勢を検出する姿勢センサの取り付け姿勢誤差を計測することができる。
【図面の簡単な説明】
【0008】
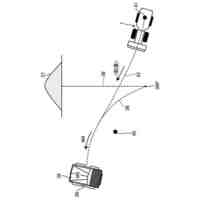
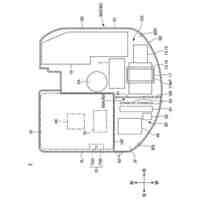
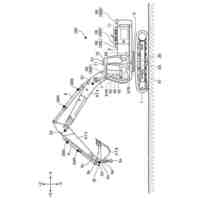
図1は、実施形態に係る作業機械を示す斜視図である。
図2は、実施形態に係る作業機械を示す模式図である。
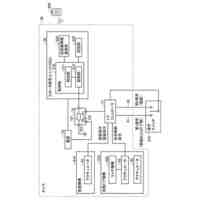
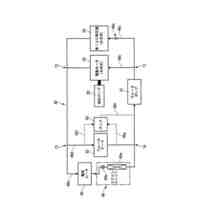
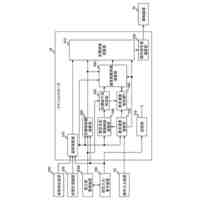
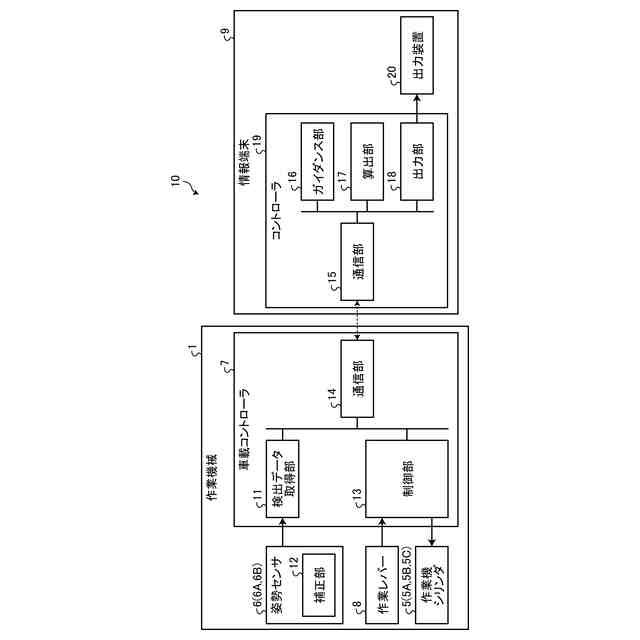
図3は、実施形態に係る作業機械の計測システムを示すブロック図である。
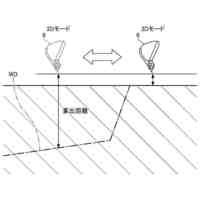
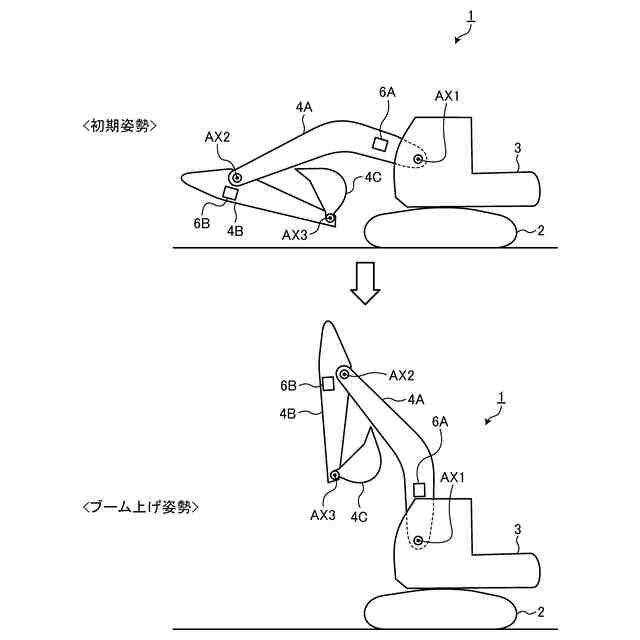
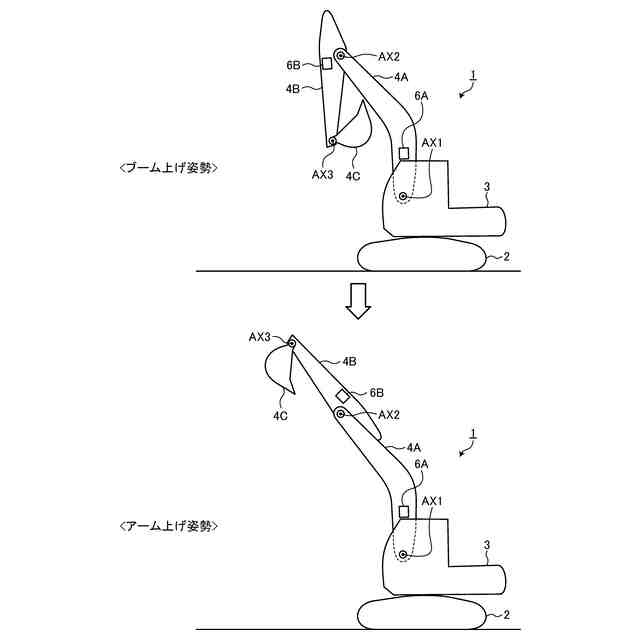
図4は、実施形態に係る姿勢センサの取り付け姿勢誤差を計測するときの作業機の動作を説明するための図である。
図5は、実施形態に係る姿勢センサの取り付け姿勢誤差を計測するときの作業機の動作を説明するための図である。
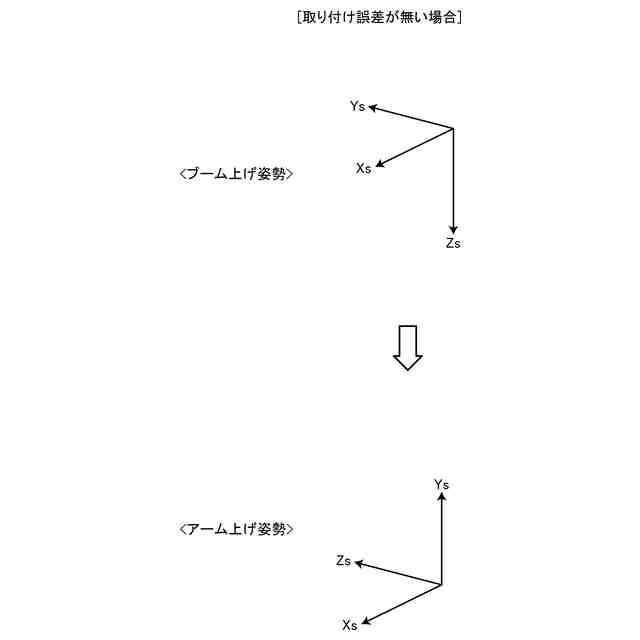
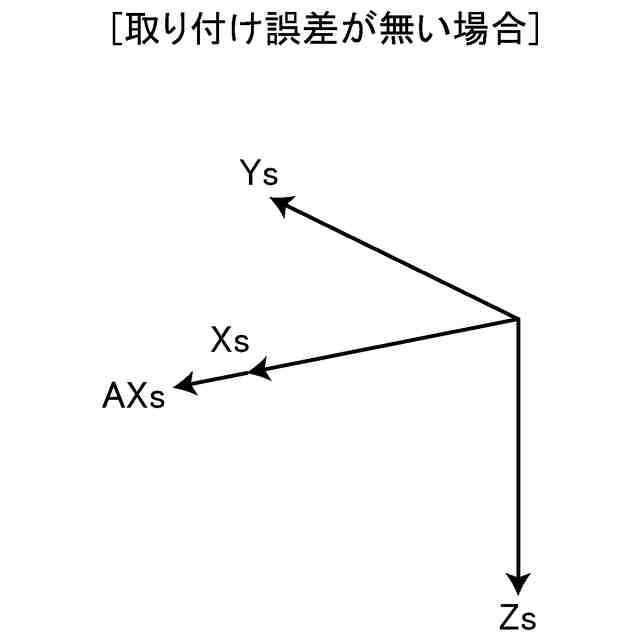
図6は、実施形態に係る姿勢センサの取り付け姿勢誤差が無い場合のセンサ作業系を説明するための図である。
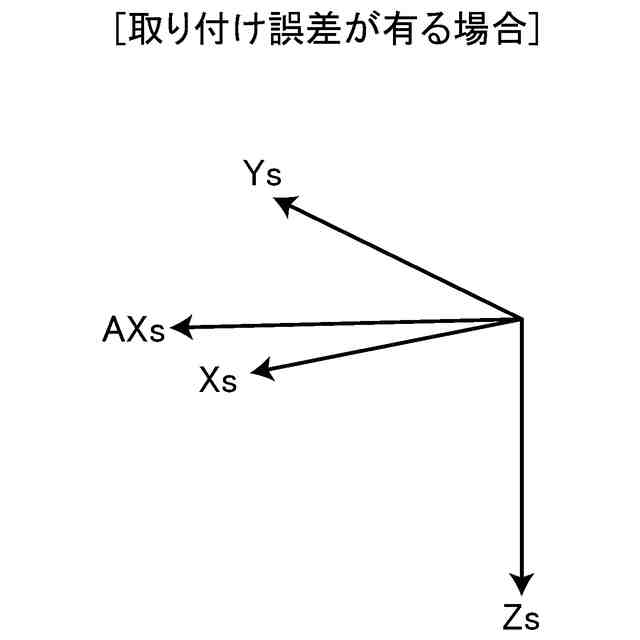
図7は、実施形態に係る姿勢センサの取り付け姿勢誤差が有る場合のセンサ作業系を説明するための図である。
図8は、実施形態に係る姿勢センサの取り付け姿勢誤差が無い場合の検出回転軸を説明するための図である。
図9は、実施形態に係る姿勢センサの取り付け姿勢誤差が有る場合の検出回転軸を説明するための図である。
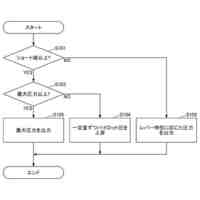
図10は、実施形態に係る姿勢センサの取り付け姿勢誤差差の計測方法を示すフローチャートである。
図11は、実施形態に係る作業機械の制御方法を示すフローチャートである。
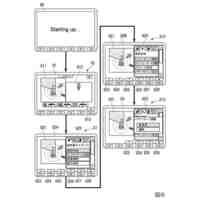
図12は、実施形態に係る作業機械の制御方法を示す模式図である。
図13は、実施形態に係るコンピュータシステムを示すブロック図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[作業機械]
図1は、実施形態に係る作業機械1を示す斜視図である。図2は、実施形態に係る作業機械1を示す模式図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
電装部品
4日前
株式会社小松製作所
ロータ、回転電機及び作業機械
今日
株式会社小松製作所
作業機械および作業機械の制御方法
1日前
株式会社小松製作所
作業機械の計測システム及び作業機械の計測方法
2日前
株式会社小松製作所
作業機械の制御システム及び作業機械の制御方法
3日前
株式会社小松製作所
作業機械の表示システムおよび作業機械の表示方法
1日前
個人
簡易免震構造
14日前
株式会社竹中工務店
建築方法
1か月前
株式会社クボタ
作業車
1か月前
住友建機株式会社
ショベル
29日前
住友建機株式会社
作業機械
29日前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
作業機械
1か月前
株式会社クボタ
作業車両
1か月前
日本車輌製造株式会社
建設機械
7日前
株式会社クボタ
作業機
今日
株式会社久保製作所
河川構造物
15日前
株式会社クボタ
作業車両
10日前
日立建機株式会社
作業機械
9日前
日本車輌製造株式会社
建設機械
29日前
株式会社本久
改良地盤構築方法
1日前
住友重機械工業株式会社
ショベル
1か月前
住友重機械工業株式会社
ショベル
1か月前
大仲建設株式会社
スコップ
1か月前
株式会社フジタ
建築物とその施工方法
今日
日立建機株式会社
電動式建設機械
15日前
前田工繊株式会社
繊維製布団篭
4日前
日本精機株式会社
施工管理システム及び施工管理方法
4日前
ナブテスコ株式会社
建設機械の関節機構
7日前
戸田建設株式会社
杭頭空間形成装置
1か月前
株式会社マキタ
打撃工具
1か月前
住友重機械工業株式会社
作業機械の制御装置
1か月前
株式会社丸和
連結金具セット、及び連結方法
9日前
株式会社小松製作所
作業機械
11日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ