TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025138027
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2024036701
出願日
2024-03-11
発明の名称
架線位置計測装置及び架線位置計測方法
出願人
株式会社明電舎
,
東京地下鉄株式会社
代理人
園田・小林弁理士法人
主分類
G01B
11/00 20060101AFI20250917BHJP(測定;試験)
要約
【課題】剛体金具の形状情報を用いて架線位置を簡便な構成で精度良く得ることができる、架線位置計測装置及び架線位置計測方法を提供する。
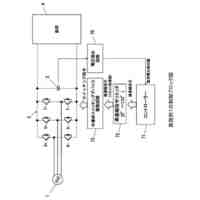
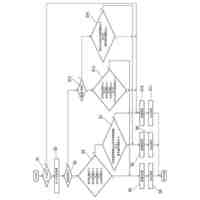
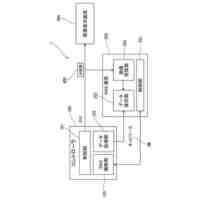
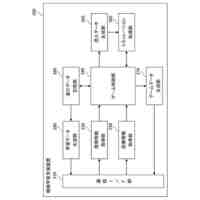
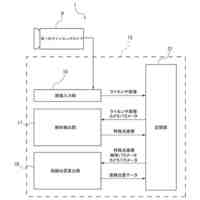
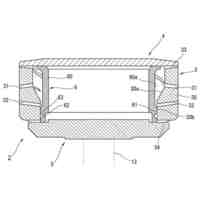
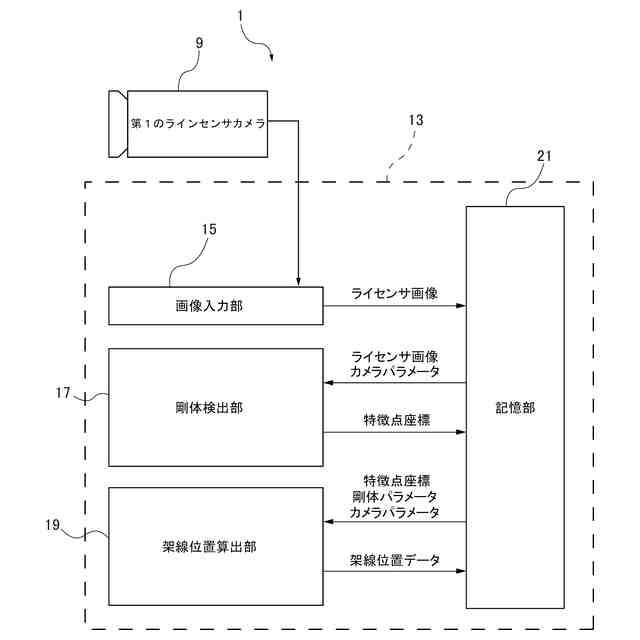
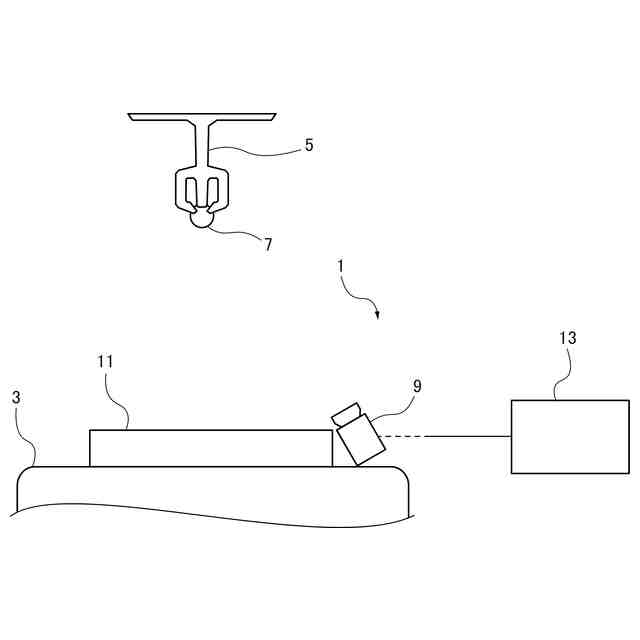
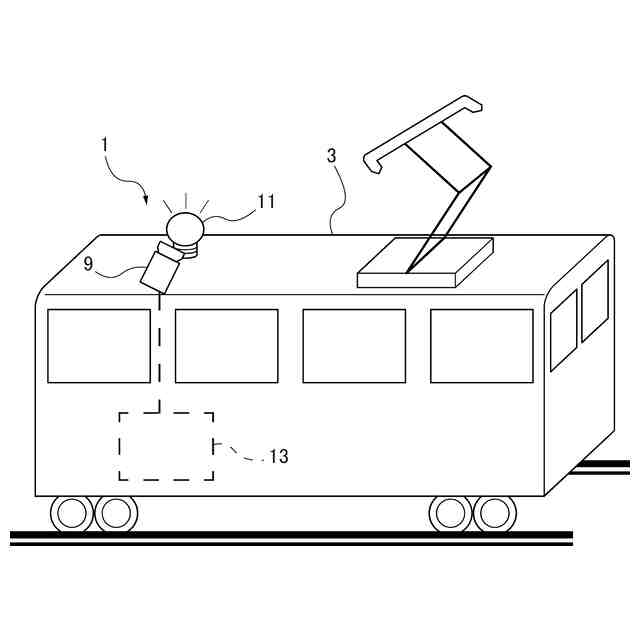
【解決手段】架線と剛体金具とを撮像する第1のラインセンサカメラ9と、前記第1のラインセンサカメラ9の画像を処理する画像処理装置13と、を備え、前記画像処理装置13は、前記第1のラインセンサカメラ9の画像から前記剛体金具の特徴点座標を検出する剛体検出部17と、前記剛体検出部17により検出した前記特徴点座標から前記架線位置を算出する架線位置算出部19と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
架線と剛体金具とを撮像する第1のラインセンサカメラと、
前記第1のラインセンサカメラの画像を処理する画像処理装置と、を備え、
前記画像処理装置は、
前記第1のラインセンサカメラの画像から前記剛体金具の特徴点座標を検出する剛体検出部と、
前記剛体検出部により検出した前記特徴点座標から前記架線位置を算出する架線位置算出部と、
を備える架線位置計測装置。
続きを表示(約 460 文字)
【請求項2】
前記架線位置算出部は、2点の前記特徴点座標から前記架線位置を算出する、請求項1に記載の架線位置計測装置。
【請求項3】
前記第1のラインセンサカメラと位置を異ならせて設置され、前記架線と前記剛体金具とを撮像する第2のラインセンサカメラと、を備える請求項1又は2に記載の架線位置計測装置。
【請求項4】
第1のラインセンサカメラで架線と剛体金具とを撮像すること、
前記撮像した画像から前記剛体金具の特徴点座標を検出すること、
前記特徴点座標から前記架線位置を算出すること、を含む架線位置計測方法。
【請求項5】
前記架線位置を算出することに際し、2点の前記特徴点座標から前記架線位置を算出すること、を含む請求項4に記載の架線位置計測方法。
【請求項6】
前記第1のラインセンサカメラと位置を異ならせた第2のラインセンサカメラで前記架線と前記剛体金具とを撮像すること、を含む請求項4又は5に記載の架線位置計測方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、架線位置計測装置及び架線位置計測方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
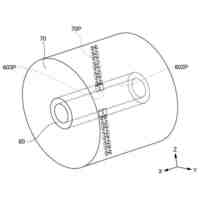
一般に、電気鉄道車両へ電力を供給する架線は、車両が通過する度に集電装置と接触するため、電気鉄道車両の運用により架線は徐々に摩耗していき、最終的には破断してしまう。そこで、架線には摩耗限界が設けられており、この摩耗限界を目安にして架線を交換することで電気鉄道車両の安定した運用が維持されている。従来、架線の摩耗状態を測定する方法としては、架線の厚みを直接測定する方法と、架線の摩耗部の幅を測定してその幅からトロリ線の厚みを換算する方法と、を挙げることができる。近年では、ラインセンサカメラの画像を処理することで、架線の摩耗部の幅を求め、架線の厚みに換算する非接触の方法が試行されてきている。
【0003】
非接触で架線の摩耗を正確に測定するためには、架線の摩耗を架線の摩耗部の幅だけで検知するのではなく、架線の厚み方向の摩耗を検知することが求められている。特に架線の断面が円ではなく矩形状のものでは、摩耗部の幅は摩耗によって変化しないため、架線の厚み方向の摩耗を非接触で検知することが必要とされる。正確な測定をする前提として、架線の幅方向と厚み方向を含む架線位置を正確に測定することが求められている。
【0004】
特許文献1には、パンタグラフに貼付したマーカを上下方向に撮影する向きに設置したラインセンサカメラ1台で撮像し、事前に算出した係数でパンタグラフの高さ(≒架線の高さ)を計測することが開示されている。特許文献2には、測域レーザ1台で架線位置を測定することが開示されている。特許文献3には、ラインセンサカメラ2台によるステレオ計測により、架線位置を測定することが開示されている。特許文献4には、ラインカメラ1台による摩耗計測により、偏位位置も測定することが開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2020-144049号公報
特開2017-146220号公報
特開2017-9446号公報
特開2007-271445号公報
特許第6641729号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の装置では、架線の高さ方向の情報は得られるが、架線の幅方向の情報について考慮されていない。特許文献2に記載の装置では、測域レーザの特徴である撮像周期と精度のトレードオフの関係によって、架線の幅方向と高さ方向の両方の位置を精度良く得られない恐れがある。特許文献3に記載の装置では、ステレオ計測のために2台のラインセンサカメラの光軸を揃える必要が生じるので、そのための作業やシステムが複雑になる恐れがある。特許文献4に記載の装置では、高さ方向の情報を得るために、追加の別システムが必要とされる。
【0007】
本発明は、上述した実情に鑑みてなされたものであり、本発明が解決しようとする課題は、剛体金具の形状情報を用いて架線位置を簡便な構成で精度良く得ることができる、架線位置計測装置及び架線位置計測方法を提供することである。
【課題を解決するための手段】
【0008】
本発明は、上記課題を解決するため、以下の手段を採用する。
すなわち、本発明の架線位置計測装置は、架線と剛体金具とを撮像する第1のラインセンサカメラと、前記第1のラインセンサカメラの画像を処理する画像処理装置と、を備え、前記画像処理装置は、前記第1のラインセンサカメラの画像から前記剛体金具の特徴点座標を検出する剛体検出部と、前記剛体検出部により検出した前記特徴点座標から前記架線位置を算出する架線位置算出部と、を備える。
【0009】
本発明の架線位置計測装置では、第1のラインセンサカメラの画像から剛体金具の特徴点を検出し、この特徴点座標から架線位置を算出するので、簡便な構成で精度良く架線位置を得ることができる。
【0010】
本発明の一態様では、前記架線位置算出部は、2点の前記特徴点座標から前記架線位置を算出する。
この一態様では、2点の特徴点座標から架線位置を算出するので、少ない手順で架線位置を得ることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社明電舎
電動機
3か月前
株式会社明電舎
回転電機
1か月前
株式会社明電舎
回転電機
2日前
株式会社明電舎
回転電機
11日前
株式会社明電舎
回転電機
9日前
株式会社明電舎
電力変換器
2か月前
株式会社明電舎
電力変換装置
2か月前
株式会社明電舎
電力変換装置
9日前
株式会社明電舎
電力変換装置
11日前
株式会社明電舎
電力変換装置
1か月前
株式会社明電舎
負荷発生装置
27日前
株式会社明電舎
電力変換装置
1か月前
株式会社明電舎
回転電機組立体
3か月前
株式会社明電舎
回転機の冷却構造
2か月前
株式会社明電舎
電力系統システム
18日前
株式会社明電舎
部分放電測定装置
2か月前
株式会社明電舎
セル多重インバータ
2か月前
株式会社明電舎
セル多重インバータ
2か月前
株式会社明電舎
軸受及びそれを備えた回転機
25日前
株式会社明電舎
電極構造,真空インタラプタ
9日前
株式会社明電舎
電極構造,真空インタラプタ
26日前
株式会社明電舎
電流センサおよび電力変換装置
18日前
株式会社明電舎
バスバー固定構造、電力変換装置
3か月前
株式会社明電舎
埋込磁石型回転子および回転電機
1か月前
株式会社明電舎
異常検知システム及び異常検知方法
1か月前
株式会社明電舎
磁気軸受の制御装置および制御方法
3か月前
株式会社明電舎
真空可変コンデンサの駆動制御装置
1か月前
株式会社明電舎
半導体モジュールおよび電力変換装置
3日前
株式会社明電舎
情報通信装置の画面情報保存システム
2か月前
株式会社明電舎
電力変換装置の制御装置および制御方法
3か月前
株式会社明電舎
機械学習支援装置及び機械学習支援方法
1か月前
株式会社明電舎
トロリ線検測装置及びトロリ線検測方法
3か月前
株式会社明電舎
架線位置計測装置及び架線位置計測方法
3日前
株式会社明電舎
ACDC電源およびACDC電源の制御方法
4か月前
株式会社明電舎
案内部材、電気機器及び電気機器の組み立て方法
3か月前
株式会社明電舎
真空インタラプタ,真空インタラプタの製造方法
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ