TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025140401
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024039781
出願日
2024-03-14
発明の名称
移動体の撮影画像から地域のエリア毎の危険のリスク値を推定するシステム、プログラム、装置及び方法
出願人
KDDI株式会社
代理人
個人
主分類
G08G
1/16 20060101AFI20250919BHJP(信号)
要約
【課題】地域のエリア毎に、移動体に搭載されたカメラの撮影画像から、渋滞、事故、事件等の時々刻々変化する危険のリスク値を推定するシステム等を提供する。
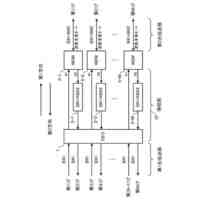
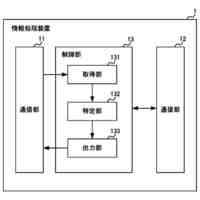
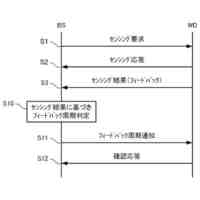
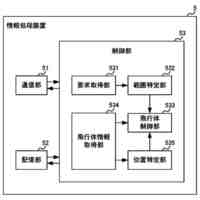
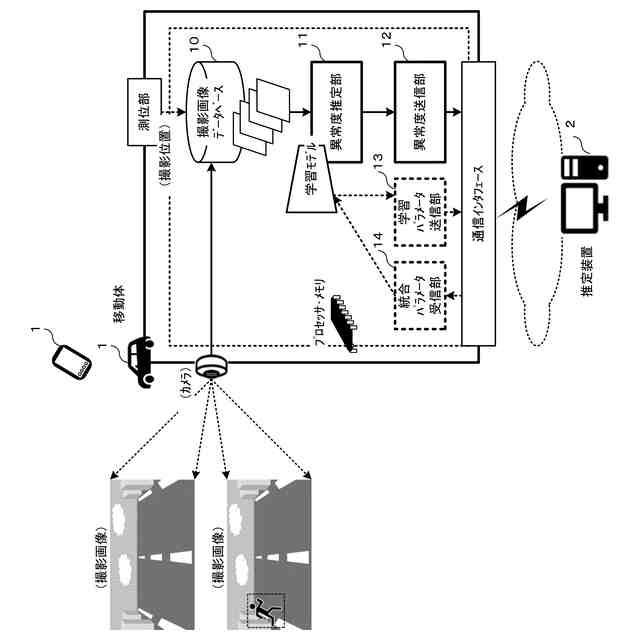
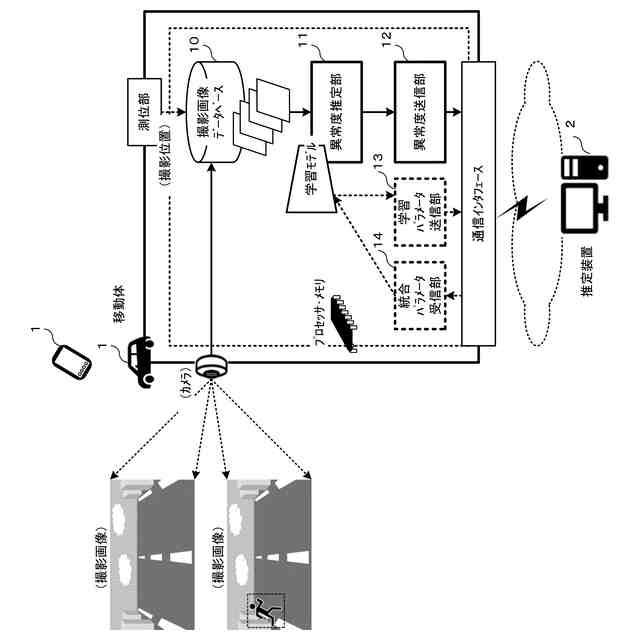
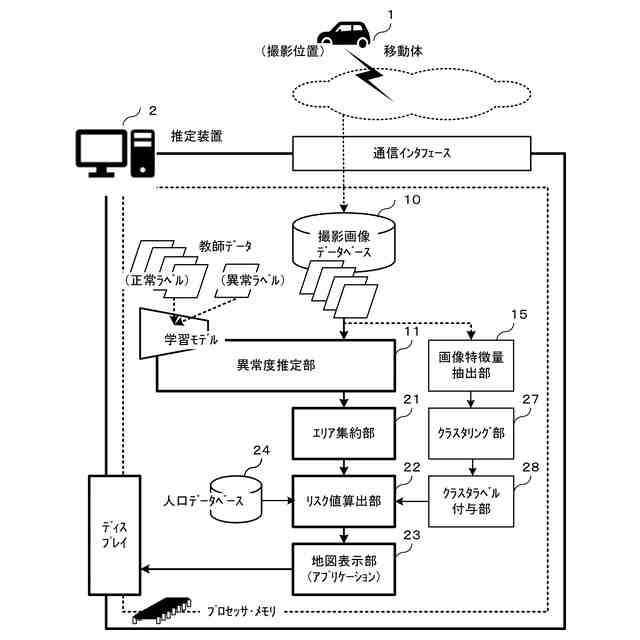
【解決手段】移動体は、自らに搭載されたカメラの撮影画像を、撮影位置と対応付けて記憶する撮影画像データベースと、正常ラベルの撮影画像と異常ラベルの撮影画像とを含む教師データによって予め訓練された学習モデルを用いて、撮影画像データベースの撮影画像毎に、異常度を推定する異常度推定手段と、撮影画像毎の異常度及び撮影位置を、推定装置へ送信する異常度送信手段とを有する。推定装置は、移動体から受信した撮影画像毎の異常度を、撮影位置が含まれるエリアp毎に集約するエリア集約手段と、エリアp毎に、異常度の統計値を、移動体におけるリスク値v(p)として算出するリスク値算出手段とを有する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体と、エリアp毎の危険のリスク値を推定する推定装置とを有するシステムであって、
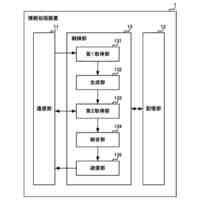
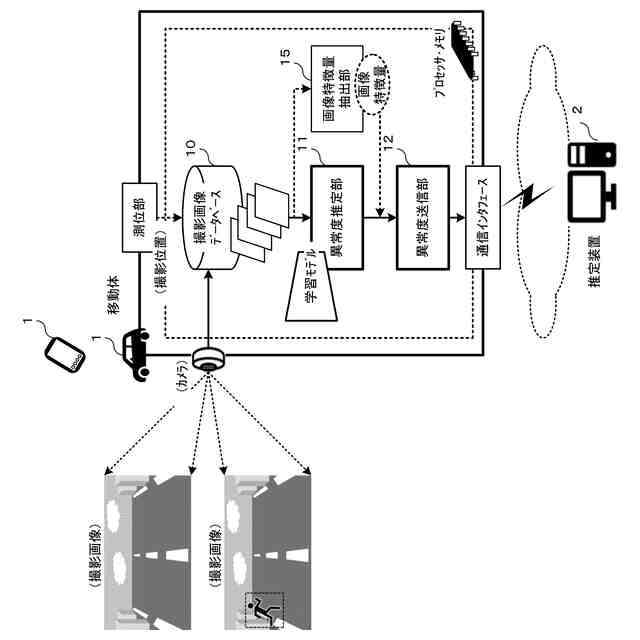
移動体は、
自らに搭載されたカメラの撮影画像を、撮影位置と対応付けて記憶する撮影画像データベースと、
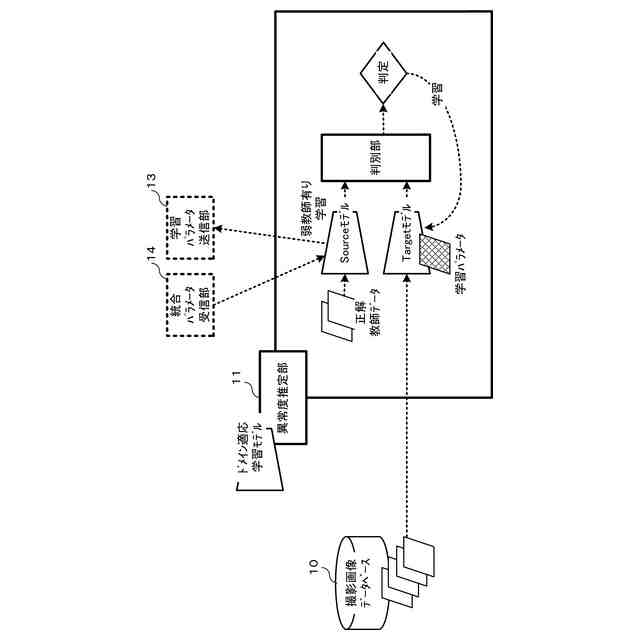
正常ラベルの撮影画像と異常ラベルの撮影画像とを含む教師データによって予め訓練された学習モデルを用いて、撮影画像データベースの撮影画像毎に、異常度を推定する異常度推定手段と、
撮影画像毎の異常度及び撮影位置を、推定装置へ送信する異常度送信手段と
を有し、
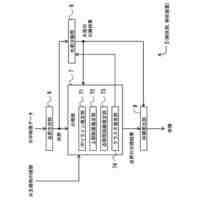
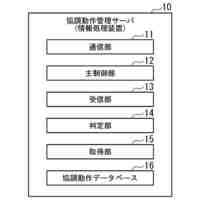
推定装置は、
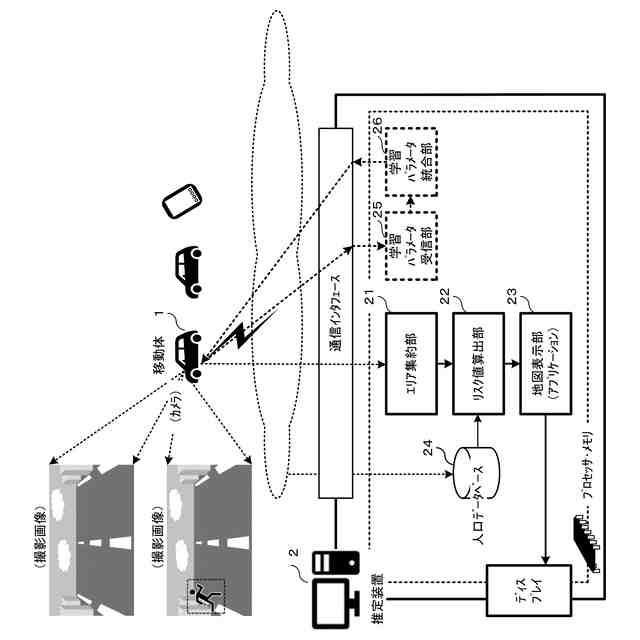
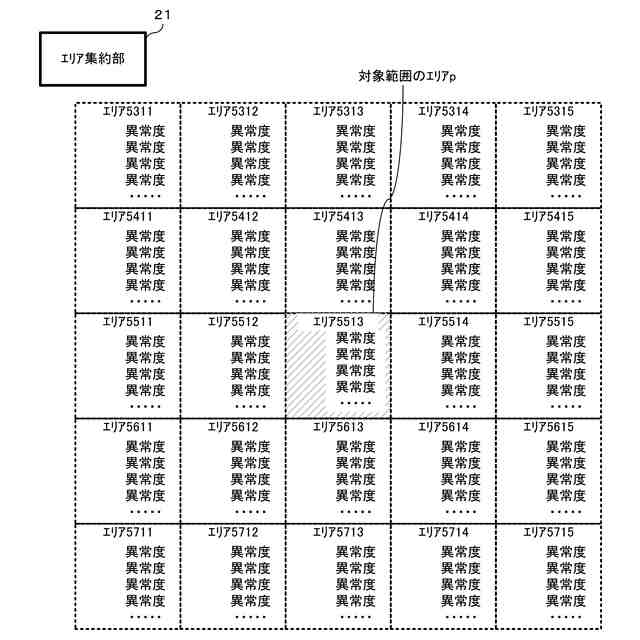
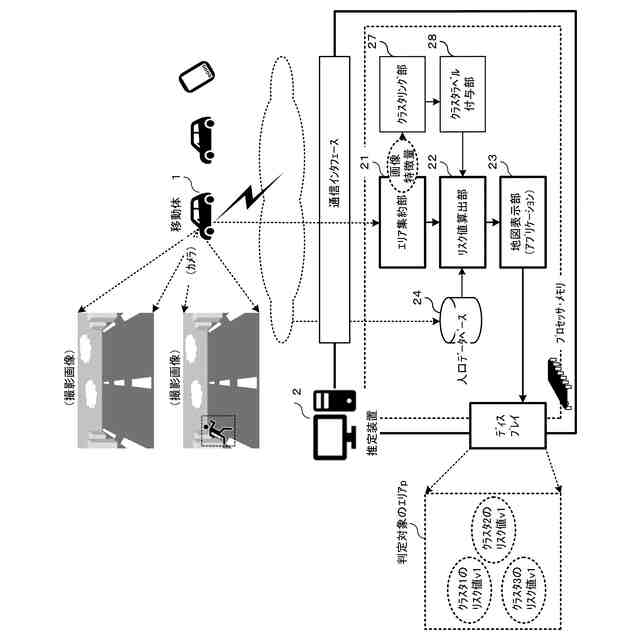
移動体から受信した撮影画像毎の異常度を、撮影位置が含まれるエリアp毎に集約するエリア集約手段と、
エリアp毎に、異常度の統計値を、移動体におけるリスク値v(p)として算出するリスク値算出手段と
を有することを特徴とするシステム。
続きを表示(約 2,100 文字)
【請求項2】
移動体について、カメラの撮影画像は、画像、又は、所定期間の動画像である
ことを特徴とする請求項1に記載のシステム。
【請求項3】
移動体は、道路を走行する車両であり、
撮影画像は、車両に搭載されたカメラによって撮影されたものであり、
撮影位置は、車両に搭載された測位部によって計測されたものである
又は、
移動体は、人が把持する携帯端末であり、
撮影画像は、携帯端末に搭載されたカメラによって撮影されたものであり、
撮影位置は、携帯端末に搭載された測位部によって計測されたものである
ことを特徴とする請求項1に記載のシステム。
【請求項4】
推定装置について、
地図上をエリアp毎に区分して、各エリアpのリスク値v(p)を表示する地図表示手段を
更に有することを特徴とする請求項1に記載のシステム。
【請求項5】
移動体における異常度推定手段は、異常度として、正常(0)又は異常(1)を推定し、
推定装置におけるリスク値算出手段は、エリアp毎の異常度の統計値として、当該エリアにおける全ての撮影画像の数に対する異常時の撮影画像の数の割合を算出し、
又は、
移動体における異常度推定手段は、異常度として、所定数値範囲の値を推定する
ことを特徴とする請求項1に記載のシステム。
【請求項6】
移動体における撮影画像データベースは、各撮影画像に、撮影時刻を更に対応付けており、
推定装置におけるリスク値算出手段は、エリアp及び時間帯tの組毎に、リスク値v(t,p)を算出する
ことを特徴とする請求項1に記載のシステム。
【請求項7】
推定装置について、
エリアp毎に、各時間帯tの滞在人口密度x(t,p)を蓄積した人口データベースを更に有し、
リスク値算出手段は、各エリアpに集約された撮影画像の数が所定数以下である場合に、
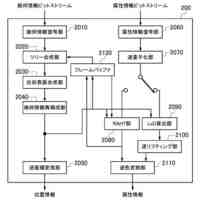
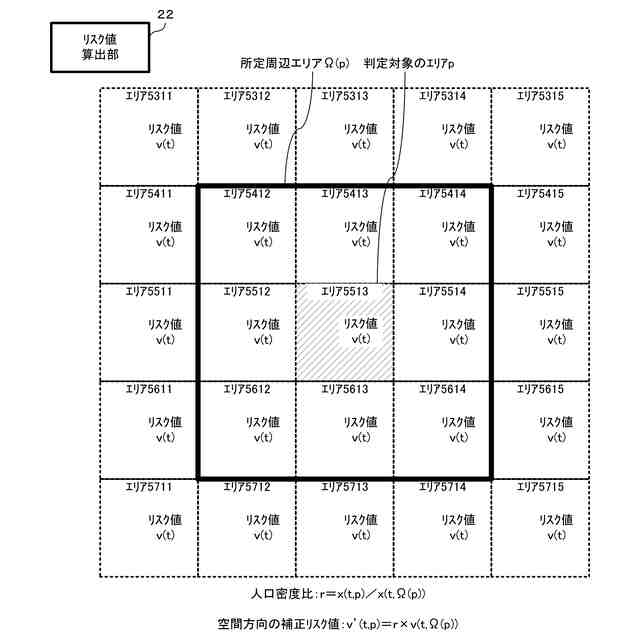
エリアp毎に、時間帯tの滞在人口密度x(t,p)を、当該エリアpを中心とした所定周辺エリアΩ(p)における時間帯tの滞在人口密度x(t,Ω(p))によって除算した、人口密度比rを算出し、
r=x(t,p)/x(t,Ω(p))
エリアp毎に、当該エリアpを中心とした所定周辺エリアΩ(p)における時間帯tの所定周辺リスク値v(t,Ω(p))に、人口密度比rを乗算した、空間方向の補正リスク値v’(t,p)を算出する
v’(t,p)=r×v(t,Ω(p))
ことを特徴とする請求項6に記載のシステム。
【請求項8】
推定装置について、
リスク値算出手段は、各エリアpに集約された撮影画像の数が所定数以下である場合に、
エリアp毎に、時間帯tのリスク値v(t,p)と、自己回帰予測モデルを用いてΔt前の時間帯t-Δtのリスク値y(t-Δt,p)から予測されたリスク値y’(t,p)とに基づいて、時間方向の補正リスク値v’’(t,p)を算出する
y’(t,p)=c+a×y(t-Δt,p)+ε
c、aは係数、εは誤差項
v’’(t,p)=y’(t,p)+K(v(t,p)-y’(t,p))
K():カルマンゲイン
ことを特徴とする請求項6に記載のシステム。
【請求項9】
推定装置について、
エリアp毎に、時間帯tのリスク値v(t,p)と、Δt前の時間帯t-Δtのリスク値y(t-Δt,p)から予測されたリスク値y’(t,p)とから予測する時空間回帰予測モデルを用いて、当該エリアpを中心とした所定周辺エリアΩ(p)における時間帯tの所定周辺リスク値z(t,Ω(p))に、人口密度比rを乗算した、時空間方向の補正リスク値v’’’(t,p)を算出する
y’(t,p)=c+a×y(t-Δt,p)+Σ
j
b
j
×y(t-Δt,Ω
j
(p))+ε
c、a、b
j
は係数、εは誤差項
jは周辺エリアΩ(p)を複数のブロックに分類したインデックス
v’’’(t,p)=y’(t,p)+K(v(t,p)-y’(t,p))
K():カルマンゲイン
ことを特徴とする請求項6に記載のシステム。
【請求項10】
移動体について、
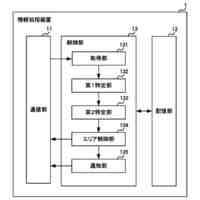
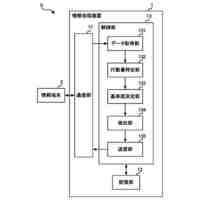
エリアp毎の複数の撮影画像から画像特徴量を抽出する画像特徴量抽出手段を更に有し、
異常度送信手段は、画像特徴量を更に、推定装置へ送信し、
推定装置について、
エリアp毎に、撮影画像毎の画像特徴量を、複数のクラスタcに分類するクラスタリング手段を更に有し、
リスク値算出手段は、エリアp毎に、各クラスタcにおけるリスク値v
c
(p)を算出する
ことを特徴とする請求項1に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の撮影画像から地域のエリア(範囲)毎の危険のリスク値を推定する技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
走行中の車両や歩行中の人に対して、エリア毎に危険のリスク値を推定することは、公益的な安全性を確保するために重要となる。
従来、車載カメラの撮影画像を用いて、対象者及び周辺人物との関係や視線に基づいて、交通リスクの検出精度を向上させる行動監視装置の技術がある(例えば特許文献1参照)。この技術によれば、車載カメラの撮影画像に映り込む複数の人物の行動を検出し、各人物の属性情報と、人物同士の関連性を表す相関情報とを検出する。そして、各人物の行動を、属性情報及び相関情報に基づいて評価する。
【0003】
また、災害時に、その発生時点の交通量に基づいてハザードマップを更新し、道路管理者に対する意思決定を支援する技術もある(例えば特許文献2参照)。この技術によれば、交通に関する状態量及びハザードマップ情報を取得し、災害発生した際の状態量の影響度とハザードマップ情報の影響度とを算出する。そして、更なる災害発生の可能性を算出する。
【先行技術文献】
【特許文献】
【0004】
特開2020-095357号公報
特開2018-092467号公報
【非特許文献】
【0005】
Xingchao Peng, Zijun Huang, Yizhe Zhu, Kate Saenko、Federated Adversarial Domain Adaptation、[online]、[令和6年3月12日検索]、インターネット<URL:https://arxiv.org/abs/1911.02054>
地域メッシュ統計の特質・沿革、[online]、[令和6年2月14日検索]、インターネット<URL:https://www.stat.go.jp/data/mesh/pdf/gaiyo1.pdf>
KDDI Location Data、[online]、[令和6年3月12日検索]、インターネット<URL:https://k-locationdata.kddi.com/>
Mu2ReST、Multi-resolution Recursive Spatio-Temporal Transformer for Long-Term Prediction、[online]、[令和6年3月12日検索]、インターネット<URL:https://dl.acm.org/doi/abs/10.1007/978-3-031-05933-9_6>
【発明の概要】
【発明が解決しようとする課題】
【0006】
前述した特許文献1によれば、交通リスクを検知できるエリアは、車載カメラを搭載した車両周辺に限定される。
また、前述した特許文献2によれば、単一時点における交通量のみを反映するために、交通量の変化に追従することはできない。
【0007】
これに対し、本願の発明者は、地域のエリア毎に、渋滞、事故、事件等の時々刻々変化する危険の度合いを、ユーザ又はオペレータに予め明示することができないか、と考えた。例えば車載カメラの撮影画像を収集し、地域のエリア毎に、危険のリスク値を推定することができないか、と考えた。このとき、収集された撮影画像の数が少ないエリアであっても、できる限り確信度の高い危険のリスク値を推定することができることが好ましい。
【0008】
そこで、本発明は、移動体に搭載されたカメラの撮影画像から、地域のエリア毎に、渋滞、事故、事件等の時々刻々変化する危険のリスク値を推定することができるシステム、プログラム、装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明によれば、移動体と、エリアp毎の危険のリスク値を推定する推定装置とを有するシステムであって、
移動体は、
自らに搭載されたカメラの撮影画像を、撮影位置と対応付けて記憶する撮影画像データベースと、
正常ラベルの撮影画像と異常ラベルの撮影画像とを含む教師データによって予め訓練された学習モデルを用いて、撮影画像データベースの撮影画像毎に、異常度を推定する異常度推定手段と、
撮影画像毎の異常度及び撮影位置を、推定装置へ送信する異常度送信手段と
を有し、
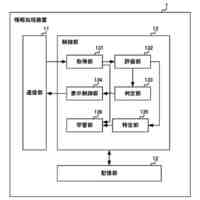
推定装置は、
移動体から受信した撮影画像毎の異常度を、撮影位置が含まれるエリアp毎に集約するエリア集約手段と、
エリアp毎に、異常度の統計値を、移動体におけるリスク値v(p)として算出するリスク値算出手段と
を有することを特徴とする。
【0010】
本発明のシステムにおける他の実施形態によれば、
移動体について、カメラの撮影画像は、画像、又は、所定期間の動画像である
ことも好ましい。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
KDDI株式会社
光増幅器
14日前
KDDI株式会社
光増幅器
14日前
KDDI株式会社
光増幅器
1日前
KDDI株式会社
光増幅器
1日前
KDDI株式会社
光接続ノード
1日前
KDDI株式会社
解析装置及びプログラム
1か月前
KDDI株式会社
緊急ネットワーク分離方法
2日前
KDDI株式会社
ユーザ端末及び通信制御方法
2か月前
KDDI株式会社
ユーザ端末及び通信制御方法
2か月前
KDDI株式会社
情報処理装置及び情報処理方法
1か月前
KDDI株式会社
情報処理装置及び情報処理方法
14日前
KDDI株式会社
情報処理装置及び情報処理方法
14日前
KDDI株式会社
情報処理装置及び情報処理方法
1か月前
KDDI株式会社
情報処理装置及び情報処理方法
1か月前
KDDI株式会社
情報処理装置及び情報処理方法
24日前
KDDI株式会社
通信制御システム及び通信制御方法
8日前
KDDI株式会社
通信制御システム及び通信制御方法
8日前
KDDI株式会社
通信制御システム及び通信制御方法
8日前
KDDI株式会社
通信制御システム及び通信制御方法
8日前
KDDI株式会社
ネットワーク制御装置及びプログラム
1か月前
KDDI株式会社
認証装置、認証方法及び認証プログラム
23日前
KDDI株式会社
中継装置、中継方法及び中継プログラム
23日前
KDDI株式会社
認証装置、認証方法及び認証プログラム
1か月前
KDDI株式会社
通信装置、無線デバイス及びプログラム
1か月前
KDDI株式会社
通信装置、無線デバイス及びプログラム
1か月前
KDDI株式会社
通信装置、無線デバイス及びプログラム
4日前
KDDI株式会社
飛行体、情報処理装置及び情報処理方法
4日前
KDDI株式会社
無線デバイス及びコンピュータプログラム
1か月前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
2か月前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
2か月前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
8日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
1か月前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
15日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
1か月前
KDDI株式会社
支援処理装置、支援処理方法及びプログラム
14日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ