TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152921
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055105
出願日
2024-03-28
発明の名称
手術ロボットシステムおよびその制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
A61B
34/35 20160101AFI20251002BHJP(医学または獣医学;衛生学)
要約
【課題】施術者が交代する場合等においても手術の継続性を担保できるようにすること。
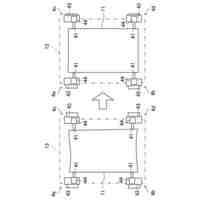
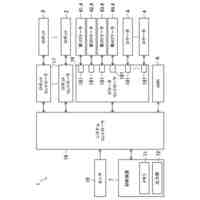
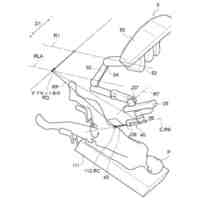
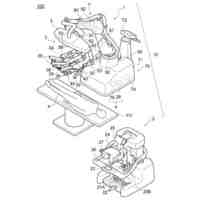
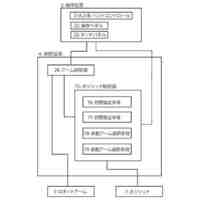
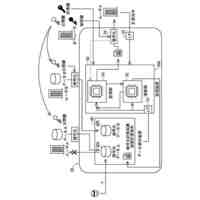
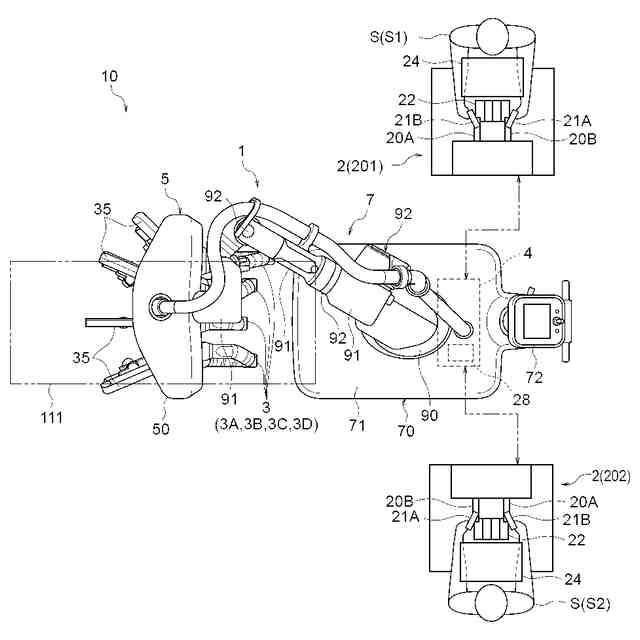
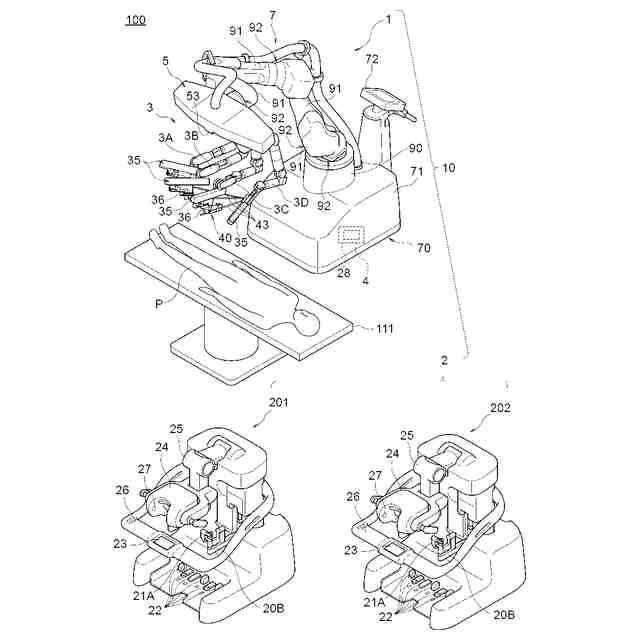
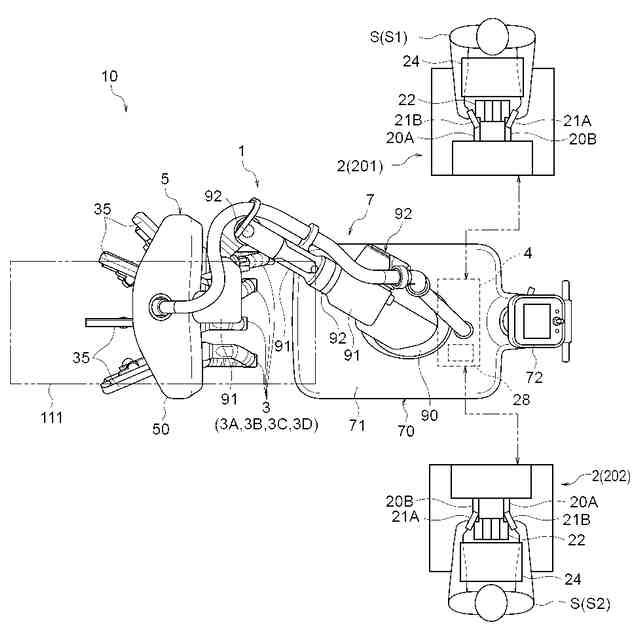
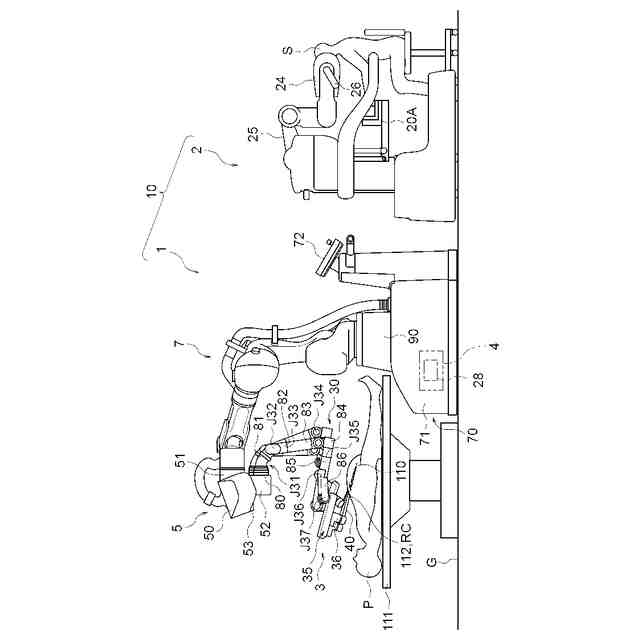
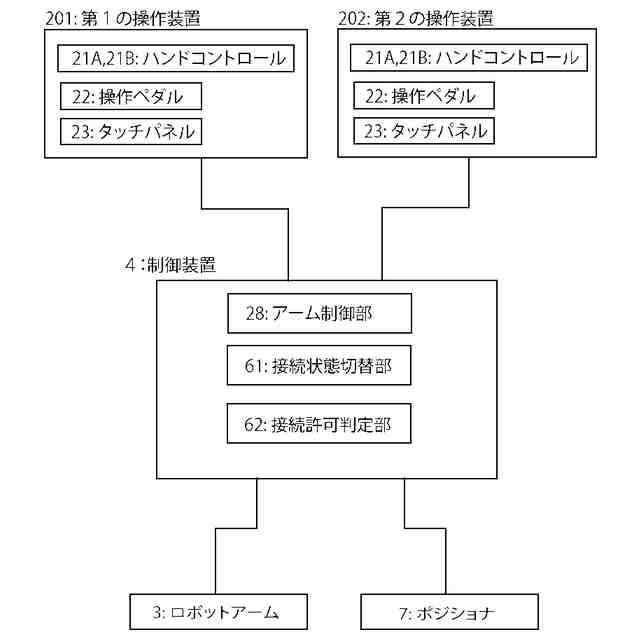
【解決手段】システム10は、手術器具40を装着可能なロボットアーム3を有する手術ロボット1と、第1の操作者S1の操作入力を受け付ける第1の操作装置201と、第2の操作者S2の操作入力を受け付ける第2の操作装置202と、操作入力に基づいてロボットアーム3を制御する制御装置4とを備える。制御装置4は、第1の操作装置201がロボットアーム3に操作可能に接続されている第1の状態と、第2の操作装置202がロボットアーム3に操作可能に接続されている第2の状態とを切り替える接続状態切替部61と、第1の状態および第2の状態のうちの切替先の状態においてロボットアーム3に操作可能に接続される、第1の操作装置201および第2の操作装置202のうちの切替先の操作装置が接続許可基準を満たしているか否かを判定する接続許可判定部62とを有する。
【選択図】図2
特許請求の範囲
【請求項1】
手術器具を装着可能なロボットアームを有する手術ロボットと、
第1の操作者の操作入力を受け付ける第1の操作装置と、
第2の操作者の操作入力を受け付ける第2の操作装置と、
前記操作入力に基づいて前記ロボットアームを制御する制御装置と、を備え、
前記制御装置は、
前記第1の操作装置が前記ロボットアームに対して操作可能に接続されている第1の状態と、前記第2の操作装置が前記ロボットアームに対して操作可能に接続されている第2の状態と、を切り替える、接続状態切替部と、
前記第1の状態および前記第2の状態のうちの切替先の状態において前記ロボットアームに対して操作可能に接続される、前記第1の操作装置および前記第2の操作装置のうちの切替先の操作装置が、接続許可基準を満たしているか否かを判定する、接続許可判定部と、を有する、手術ロボットシステム。
続きを表示(約 1,200 文字)
【請求項2】
前記接続許可基準は、前記切替先の操作装置の状態と前記手術器具の状態との間の整合の度合いが許容範囲内にあることを含んでおり、
前記制御装置は、
前記整合の度合いが前記許容範囲内にあるか否かを判定し、
前記整合の度合いが前記許容範囲内にない場合には、前記第1の状態と前記第2の状態との間の切り替えを行わないことを決定する、請求項1記載の手術ロボットシステム。
【請求項3】
前記制御装置は、さらに、前記整合の度合いが前記許容範囲内にない場合に、前記整合の度合いが前記許容範囲内になるように前記操作装置の位置および/または姿勢を自動で制御する、請求項2記載の手術ロボットシステム。
【請求項4】
前記接続許可基準は、前記切替先の操作装置の操作者が前記操作装置を操作する状況にあることを含む、請求項1または2に記載の手術ロボットシステム。
【請求項5】
前記制御装置は、前記第1の操作装置および前記第2の操作装置のうちのいずれか一方を優先性判定基準に基づいて優先的な操作装置であると決定し、
前記接続許可基準は、前記切替先の操作装置が前記優先的な操作装置であることを含む、請求項1または2に記載の手術ロボットシステム。
【請求項6】
前記第1の操作者および前記第2の操作者の少なくとも一方から切替要求を前記制御装置に入力する切替要求入力手段をさらに備え、
前記優先性判定基準は、前記切替要求が前記切替先の操作装置を操作している操作者が操作した前記切替要求入力手段によって発信されたことを含む、請求項5記載の手術ロボットシステム。
【請求項7】
切替要求生成基準に基づいて切替要求を自動で生成する切替要求生成手段をさらに備えた、請求項1または2に記載の手術ロボットシステム。
【請求項8】
前記切替要求生成手段は、前記第1の操作装置および前記第2の操作装置のうちの一方の操作装置の操作者が前記操作装置を操作する状況にないことが検出されたことに応じて前記切替要求を生成する、請求項7記載の手術ロボットシステム。
【請求項9】
前記切替要求生成手段は、前記第1の操作装置および前記第2の操作装置のうちの一方の操作装置と前記制御装置との間の通信状態が所定の通信レベルを満たしていないことが検出されたことに応じて前記切替要求を生成する、請求項7記載の手術ロボットシステム。
【請求項10】
前記手術ロボットによって行われている手術の状況に関する情報を取得する手術状況監視手段をさらに備え、
前記切替要求生成基準は、前記手術の状況に関連する基準を含む、請求項7記載の手術ロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、手術ロボットシステムおよびその制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、手術器具を外科医が直接手に取って操作する手術方式に代えて、ロボットを利用して手術器具を操作して外科手術を行うための手術ロボットシステムが開示されている。手術ロボットシステムは、例えば、外科手術を受ける患者への負担を軽減することができる低侵襲外科手術(minimally invasive surgery)において使用される。
【0003】
手術ロボットシステムは、一般に、患者の傍に配置された手術ロボットと、外科医がリモートで手術ロボットを操作するための操作装置とを備えている。外科医が操作する操作装置は、例えば、患者が載置された手術ベッドが配置されている手術室の内部に配置される。手術ロボットは、ロボットアームを有し、ロボットアームには、手術器具が着脱可能に装着される。ロボットアームに装着される手術器具は、例えば、患者に設けられたポート部材に挿通可能な構成を備えている。ポート部材は、例えばトロカーまたはカニューレである。手術器具の種類は、鉗子、電気メス、ステープラー、内視鏡等であり、それらの中から手術の術式等に応じて適宜選択される。手術ロボットが複数のロボットアームを備えている場合には、ロボットアーム毎に異なる種類の手術器具を装着する場合もあるし、同じ種類の手術器具を2本またはより多くのロボットアームに装着する場合もある。例えば、1本のロボットアームに内視鏡を装着し、他の2本またはより多くのロボットアームに鉗子を装着する。
【0004】
外科医(操作者)は、操作装置を操作して手術ロボットを操作することによって、ロボットアームに装着された手術器具の位置および姿勢を制御することができる。従来の手術ロボットシステムは、一般に、手術ロボットを操作するための1台の操作装置を備えており、1人の操作者(外科医)が手術ロボットを操作して手術を行うように構成されている。(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
国際公開第2021/112193号
【発明の概要】
【発明が解決しようとする課題】
【0006】
外科医によって実施される手術の内容、或いは手術の状況によっては、手術の途中で、施術を担当する外科医(施術者)を交代させる必要がある場合があり得る。
【0007】
しかしながら、従来の手術ロボットシステムは、手術の途中で施術者を交代させる必要がある場合等において、手術の継続性を十分に担保することが必ずしも容易ではなった。
【0008】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、手術の途中で施術者を交代させる場合等において、手術の継続性を十分に担保することができる手術ロボットシステムおよびその制御方法を提供することである。
【課題を解決するための手段】
【0009】
(態様1)
この開示の態様1は、
手術器具を装着可能なロボットアームを有する手術ロボットと、
第1の操作者の操作入力を受け付ける第1の操作装置と、
第2の操作者の操作入力を受け付ける第2の操作装置と、
前記操作入力に基づいて前記ロボットアームを制御する制御装置と、を備え、
前記制御装置は、
前記第1の操作装置が前記ロボットアームに対して操作可能に接続されている第1の状態と、前記第2の操作装置が前記ロボットアームに対して操作可能に接続されている第2の状態と、を切り替える、接続状態切替部と、
前記第1の状態および前記第2の状態のうちの切替先の状態において前記ロボットアームに対して操作可能に接続される、前記第1の操作装置および前記第2の操作装置のうちの切替先の操作装置が、接続許可基準を満たしているか否かを判定する、接続許可判定部と、を有する、手術ロボットシステムである。
【0010】
(態様2)
この開示の態様2は、前記接続許可基準は、前記切替先の操作装置の状態と前記手術器具の状態との間の整合の度合いが許容範囲内にあることを含んでおり、
前記制御装置は、
前記整合の度合いが前記許容範囲内にあるか否かを判定し、
前記整合の度合いが前記許容範囲内にない場合には、前記第1の状態と前記第2の状態との間の切り替えを行わないことを決定する、態様1記載の手術ロボットシステムである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
1日前
川崎重工業株式会社
ロボット
8日前
川崎重工業株式会社
ロボット
10日前
川崎重工業株式会社
断熱配管
1日前
川崎重工業株式会社
ダクト継手
8日前
川崎重工業株式会社
塗装システム
1日前
川崎重工業株式会社
監視システム
2日前
川崎重工業株式会社
ゼオライト触媒
10日前
川崎重工業株式会社
遠心ターボ機械
10日前
川崎重工業株式会社
配管の支持構造
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ワーク搬送ロボット
1日前
川崎重工業株式会社
締結方法及び締結装置
8日前
川崎重工業株式会社
極低温流体用配管設備
3日前
川崎重工業株式会社
ロボットの診断システム
2日前
川崎重工業株式会社
環状フレームの成形方法
12日前
株式会社キッツ
逆流防止弁
2日前
川崎重工業株式会社
支援システムおよび支援方法
1日前
川崎重工業株式会社
経路作成方法及び経路作成装置
1日前
川崎重工業株式会社
アンモニア回収システム及び方法
1日前
川崎重工業株式会社
ガス燃料供給システムおよび船舶
8日前
川崎重工業株式会社
ロボットシステム及びその動作方法
3日前
川崎重工業株式会社
配管の接続構造および配管システム
4日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
1日前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
ワーク搬送ロボットおよびロボット制御方法
1日前
川崎重工業株式会社
油圧ショベルの油圧システムおよびブーム制御弁
4日前
川崎重工業株式会社
ロボットシステムの制御方法及びロボットシステム
2日前
川崎重工業株式会社
秘密計算システム、秘密計算方法及び秘密計算装置
9日前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
1日前
川崎重工業株式会社
手術支援システム、手術支援方法および情報提供方法
1日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ