TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025150772
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051837
出願日
2024-03-27
発明の名称
ロボットシステムの制御方法及びロボットシステム
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B25J
13/08 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数の支持ロボットが協働してワークを支持する場合に、複数の支持ロボットに均等な負荷がかかるようにする。
【解決手段】ロボットシステム1の制御方法は、変位可能な係合部46を有する複数の支持ロボット(ロケータ4)のそれぞれが、ワークにおける互いに異なる部位に係合部を係合させた状態で、ワークを持ち上げて支持し、ワークを支持している状態において、複数の支持ロボットそれぞれにかかる負荷に関するパラメータを取得し、取得したパラメータに基づいて、複数の支持ロボットにかかる負荷が均等になるよう、複数の支持ロボットのうちの少なくとも一の支持ロボットの係合部の位置を変更する。
【選択図】図7
特許請求の範囲
【請求項1】
変位可能な係合部を有する複数の支持ロボットのそれぞれが、ワークにおける互いに異なる部位に前記係合部を係合させた状態で、前記ワークを持ち上げて支持し、
前記ワークを支持している状態において、前記複数の支持ロボットそれぞれにかかる負荷に関するパラメータを取得し、
取得したパラメータに基づいて、前記複数の支持ロボットにかかる負荷が均等になるよう、前記複数の支持ロボットのうちの少なくとも一の支持ロボットの前記係合部の位置を変更する、
ロボットシステムの制御方法。
続きを表示(約 790 文字)
【請求項2】
請求項1に記載のロボットシステムの制御方法において、
前記支持ロボットは、前記係合部を変位させるためのモータを有し、
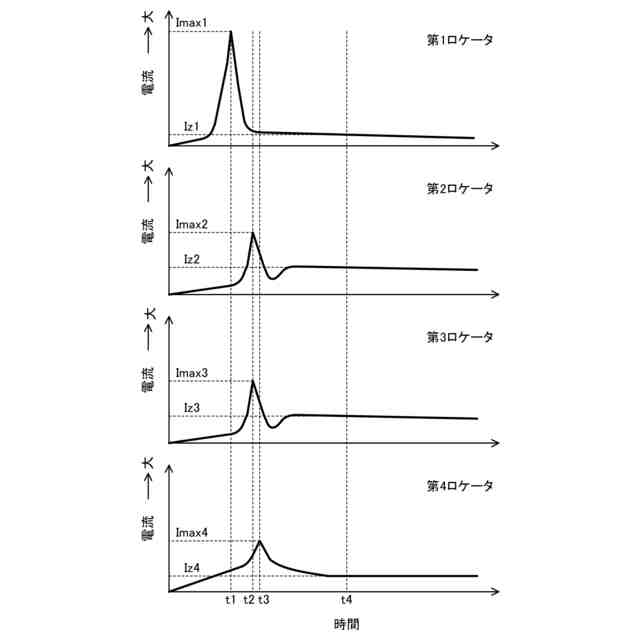
前記パラメータは、前記ワークが静止するよう前記ワークを支持している前記支持ロボットの前記モータへ供給される電流値である、
ロボットシステムの制御方法。
【請求項3】
請求項1に記載のロボットシステムの制御方法において、
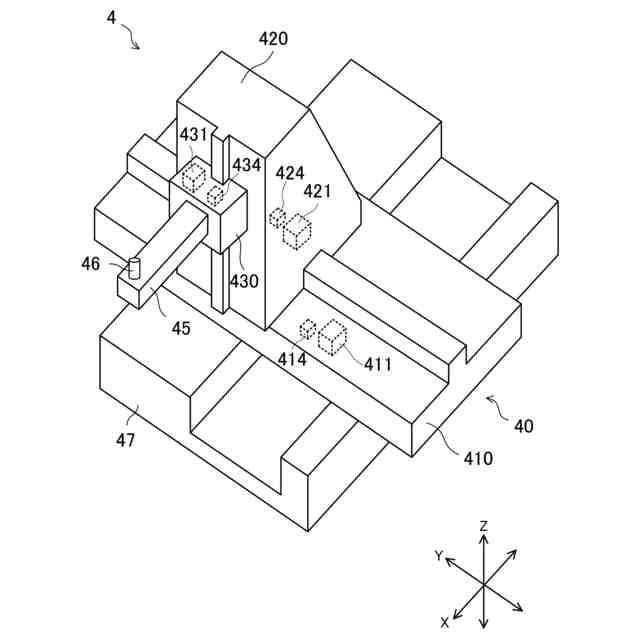
前記支持ロボットは、前記係合部を、水平面内において互いに直交するX軸及びY軸、並びに、鉛直なZ軸それぞれの方向へ変位させる3軸直交ロボットであり、
前記係合部は、前記複数の支持ロボットにかかる負荷が均等になるよう、前記X軸、前記Y軸、及び前記Z軸の少なくとも一の方向へ変位される、
ロボットシステムの制御方法。
【請求項4】
請求項1乃至3のいずれか1項に記載のロボットシステムの制御方法において、
前記複数の支持ロボットにかかる負荷が均等になるよう前記係合部の位置を変更した後、前記複数の支持ロボットに支持されている前記ワークについて、作業ロボットの教示がさらに行われる、
ロボットシステムの制御方法。
【請求項5】
変位可能な係合部を有し、かつワークにおける互いに異なる部位に前記係合部を係合させた状態で、前記ワークを持ち上げて支持する複数の支持ロボットと、
前記ワークを支持している状態において、前記複数の支持ロボットそれぞれにかかる負荷に関するパラメータを取得すると共に、取得したパラメータに基づいて、前記複数の支持ロボットにかかる負荷が均等になるよう、前記複数の支持ロボットのうちの少なくとも一の支持ロボットの前記係合部の位置を変更させるコントローラと、
を備える、ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、ロボットシステムの制御方法及びロボットシステムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、従来のロボットシステムが記載されている。従来のロボットシステムは、自動車の車体の組み立てラインに採用されている。従来のロボットシステムには、モニタリング装置が採用されている。
【0003】
モニタリング装置は、組み立てラインにおいて動作及び休止区間が繰り返し駆動される複数のモータを監視する。モニタリング装置は、初期データ格納部と、観測データ格納部と、モニタリング情報提供部とを含む。初期データ格納部は、モータ別に、モータの正常状態で測定した時間による電流値を基に、動作区間の時間長さ、動作区間のピーク電流、動作区間に含まれている定速区間の平均電流、動作区間を分割したサブ区間別電流の積分面積に関する情報をモータの初期データとして格納する。観測データ格納部は、モータの動作時に観測される動作区間ごとに、動作区間の時間長さ、ピーク電流、定速区間の平均電流、サブ区間別の積分面積に関する情報を監視因子別観測データとして格納する。モニタリング情報提供部は、観測データの各情報を、初期データの各情報に対応して既に設定された臨界レベルと個別に比較して、監視因子別にモータの状態モニタリング情報を提供する。従来のモニタリング装置は、ロボットシステムのモータの故障を検知できる。
【先行技術文献】
【特許文献】
【0004】
特表2018-520947号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
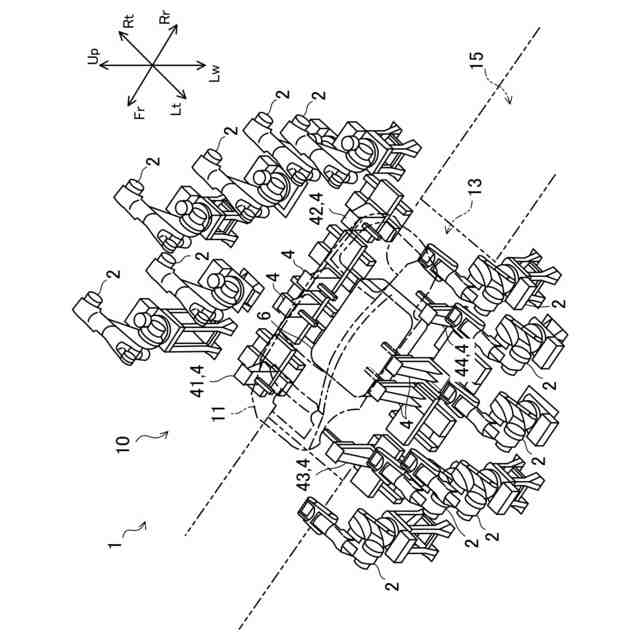
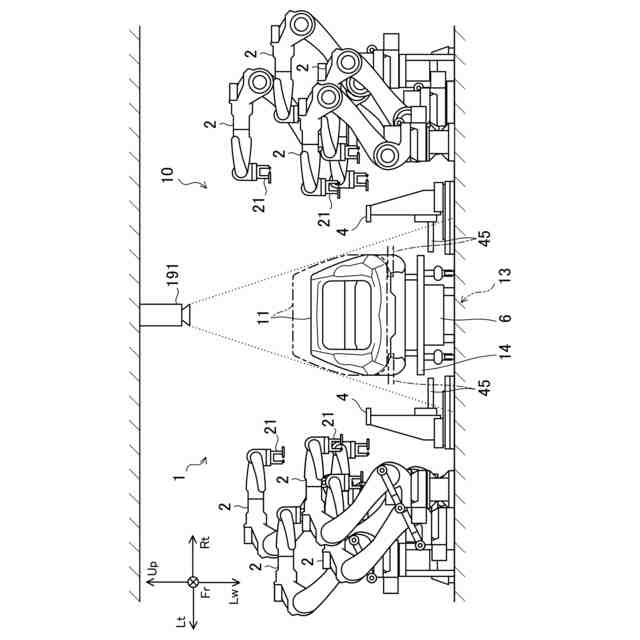
ところで、ロボットがワークに対して作業を行う作業エリアにおいて、複数の支持ロボットが協働することにより、ワークの支持を行う場合がある。例えば、複数の支持ロボットの係合部がワークの互いに異なる部位に係合した状態で、複数の支持ロボットが同期することにより、ワークを持ち上げて支持する。
【0006】
ワークを支持する複数の支持ロボットに、負荷が均等にかかるとは限らない。例えば、複数の支持ロボットに支持されているワークの重心位置が、複数の支持ロボット間の中央からずれていると、重心位置から離れている支持ロボットにかかる負荷は相対的に大きくなってしまう。相対的に大きい負荷がかかる支持ロボットは、他の支持ロボットよりも故障しやすい。協働してワークを支持する複数の支持ロボットには、均等な負荷がかかることが求められる。
【課題を解決するための手段】
【0007】
ここに開示する技術は、
変位可能な係合部を有する複数の支持ロボットのそれぞれが、ワークにおける互いに異なる部位に前記係合部を係合させた状態で、前記ワークを持ち上げて支持し、
前記ワークを支持している状態において、前記複数の支持ロボットそれぞれにかかる負荷に関するパラメータを取得し、
取得したパラメータに基づいて、前記複数の支持ロボットにかかる負荷が均等になるよう、前記複数の支持ロボットのうちの少なくとも一の支持ロボットの前記係合部の位置を変更する、
ロボットシステムの制御方法である。
【発明の効果】
【0008】
前記のロボットシステムの制御方法によれば、複数の支持ロボットが協働してワークを支持する場合に、複数の支持ロボットに均等な負荷がかかるようにできる。
【図面の簡単な説明】
【0009】
図1は、自動車の製造ラインに適用されたロボットシステムを示す。
図2は、ロボットシステムを示す。
図3は、ロボットシステムのブロック図である。
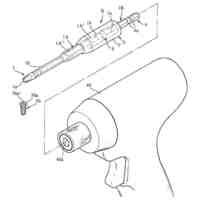
図4は、ロケータの概略図である。
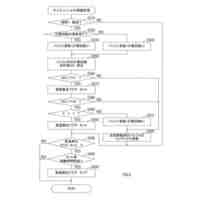
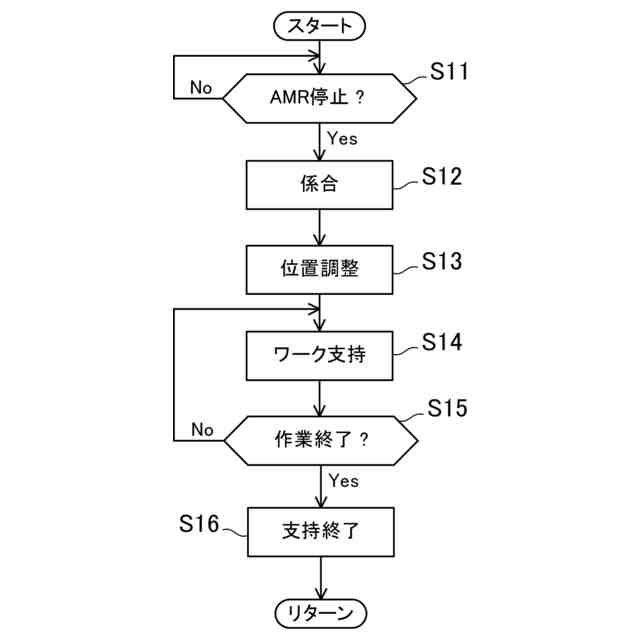
図5は、ワークの支持に関するロボットシステムの制御手順を示すフローチャートである。
図6は、第1、第2、第3及び第4ロケータそれぞれの第3モータに供給される電流値の変化の一例を示す。
図7は、キャリブレーションモードにおけるロケータの制御手順を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、ロボットの診断システムの実施形態について、図面を参照しながら説明する。ここで説明するロボットの診断システムは例示である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
1か月前
川崎重工業株式会社
ロボット
10日前
株式会社三協システム
製函機
1か月前
CKD株式会社
把持装置
1か月前
株式会社三協システム
移載装置
1か月前
株式会社不二越
ロボット
9日前
株式会社竹中工務店
補助セット
9日前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
ハンド
1日前
株式会社不二越
ロボット操作装置
1か月前
株式会社ミクロブ
把持装置
1か月前
SMC株式会社
着脱装置
1か月前
日本精工株式会社
締結用工具
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
トヨタ自動車株式会社
ロボット
4日前
工機ホールディングス株式会社
作業機
1日前
株式会社不二越
移動ロボットシステム
12日前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
塗装システム
1日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
エッジ仕上げ装置
22日前
本田技研工業株式会社
装置
15日前
トヨタ自動車株式会社
歩行ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
4日前
株式会社不二越
垂直多関節ロボット
23日前
アネックスツール株式会社
ドライバービット
8日前
ライオン株式会社
移載システム
24日前
シンフォニアテクノロジー株式会社
搬送装置
12日前
大和ハウス工業株式会社
ねじ回転工具
1か月前
ダイハツ工業株式会社
移載治具
1か月前
工機ホールディングス株式会社
作業機
1日前
ワールド技研株式会社
ロボットセル装置
9日前
川崎重工業株式会社
ワーク搬送ロボット
1日前
株式会社マキタ
回転打撃工具
4日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ