TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025142742
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024042264
出願日
2024-03-18
発明の名称
遠心ターボ機械
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
F04D
29/44 20060101AFI20250924BHJP(液体用容積形機械;液体または圧縮性流体用ポンプ)
要約
【課題】遠心ターボ機械において、吐出管内の吐出流れとボリュートからの逆流との合流領域の流れ場の乱れを低減する。
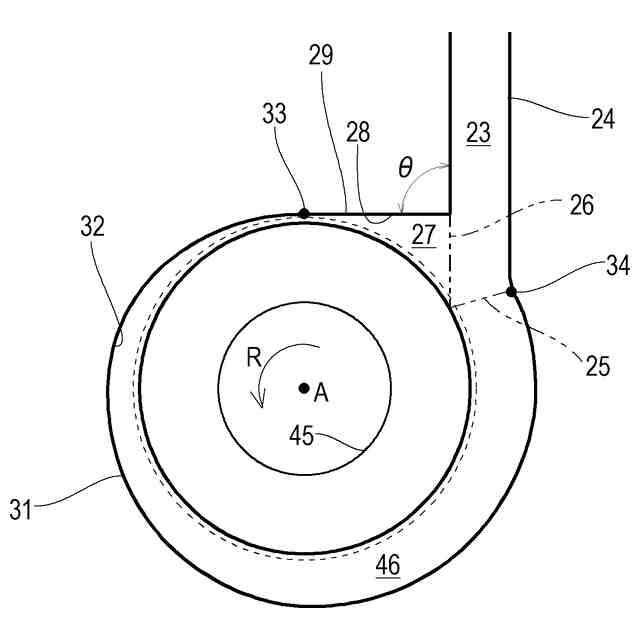
【解決手段】遠心ターボ機械は、インペラと、インペラの外周側に配置されたディフューザと、ディフューザの外周に配置されてディフューザから吐き出された流体を集めるボリュートと、ボリュートの終端と接続された吐出管とを有し、インペラ及びディフューザを収容したケーシングと、を備える。吐出管は、ボリュートの終端と接続された第1開口と、吐出管の延伸方向に沿って延びる第2開口とを有し、ケーシングは、ディフューザの外周に配置されて、ボリュートの始端と吐出管の第2開口とを接続する舌部流路を形作る接続部を有する。
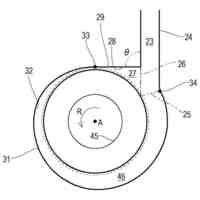
【選択図】図2
特許請求の範囲
【請求項1】
インペラと、
前記インペラの外周側に配置されたディフューザと、
前記ディフューザの外周に配置されて前記ディフューザから吐き出された流体を集めるボリュートと、前記ボリュートの終端と接続された吐出管とを有し、前記インペラ及び前記ディフューザを収容したケーシングと、を備え、
前記吐出管は、前記ボリュートの終端と接続された第1開口と、前記吐出管の延伸方向に沿って延びる第2開口とを有し、
前記ケーシングは、前記ディフューザの外周に配置されて、前記ボリュートの始端と前記吐出管の前記第2開口とを接続する舌部流路を形作る接続部を更に有する、
遠心ターボ機械。
続きを表示(約 620 文字)
【請求項2】
前記接続部は前記ボリュートの始端の外周縁と前記吐出管の前記第2開口の下流端縁とを接続する接続部外周壁を有し、
前記インペラの軸方向から見て、前記接続部外周壁と前記吐出管の交差部において、前記接続部外周壁の接線方向と前記吐出管の延伸方向との成す角度が90°以上135°以下である、
請求項1に記載の遠心ターボ機械。
【請求項3】
前記軸方向から見て、前記接続部外周壁と前記吐出管の交差部において、前記接続部外周壁の接線方向は前記吐出管内の流体が下流へ向かう方向と平行な成分を有する、
請求項2に記載の遠心ターボ機械。
【請求項4】
前記接続部外周壁は、前記ボリュートの始端の外周縁の接線に沿って配置されている、
請求項2又は3に記載の遠心ターボ機械。
【請求項5】
前記接続部外周壁は、前記ボリュートの始端の外周縁の接線よりも径方向外側に配置されている、
請求項2又は3に記載の遠心ターボ機械。
【請求項6】
前記舌部流路は、径方向外側へ向かって流路断面の面積が徐々に減少する、
請求項1乃至3のいずれか一項に記載の遠心ターボ機械。
【請求項7】
前記ボリュートの始端から終端までの回転方向の角度は、270°以上310°以下である、
請求項1乃至3のいずれか一項に記載の遠心ターボ機械。
発明の詳細な説明
【技術分野】
【0001】
本開示は、遠心ターボ機械の構成に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から、翼表面の圧力を通じて機械的仕事と流体力学的エネルギーの授受を行う遠心ターボ機械が知られている。遠心ターボ機械として、圧縮機、過給機、ポンプなどが例示される。特許文献1には遠心ターボ機械の一種であるタービンポンプが開示されている。
【0003】
特許文献1に開示の遠心ターボ機械は、インペラと、インペラを内部に軸支したケーシングと、インペラの外周とケーシングの内壁との径方向の間に配置された複数のガイドベーンと、複数のガイドベーンの周囲にスクロール流路を形成した出口ボリュートと、出口ボリュートの終端と接続された吐出管とを備えている。この遠心ターボ機械では、インペラへ軸方向へ流入した流体に対し、回転するインペラを径方向に通過する過程で遠心力によってエネルギーが与えられる。インペラを通過した流体は、複数のガイドベーンの隙間を通って、ボリュート内に流入する。ボリュート内で集められた流体は、吐出管を通じて外部へ吐出される。
【先行技術文献】
【特許文献】
【0004】
特開2017-214838号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
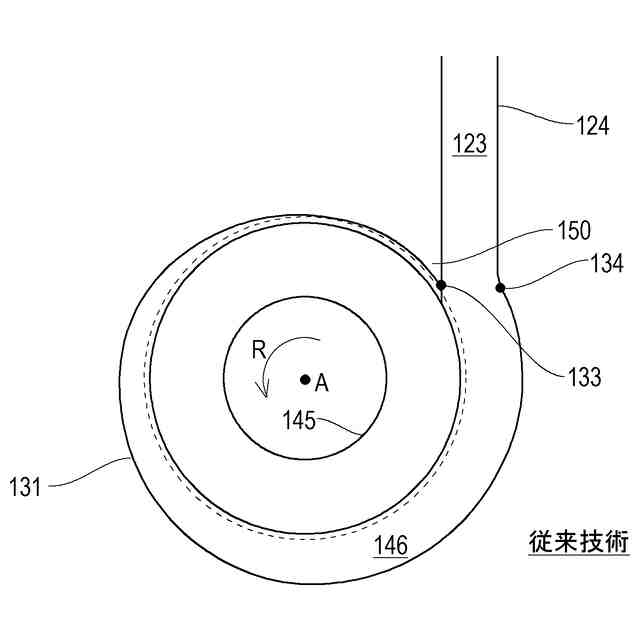
遠心ターボ機械において、ボリュートと吐出管との接続部分には、ボリュート内のスクロール流れと吐出管内の吐出流れとを分断する舌部が存在する。舌部周辺の流体は舌部を介して、一方ではスクロール方向へ流れ、他方では流体は吐出方向へ流れる。舌部の近傍では、流れ場が乱れることにより流体のエネルギーの損失が生じる。更に、流体の一部が舌部を超えて逆流して吐出管内へ流れ出る状況が生じる場合があり、この場合は、吐出管内へ流れ出た逆流によって吐出流れが縮流する。その結果、吐出管の有効断面積が低下し、吐出流れの流速が増加して流体のエネルギーの損失が生じる。
【0006】
本開示は以上の事情に鑑みてなされたものであり、その目的は、遠心ターボ機械において、吐出管内の吐出流れとボリュートからの逆流との合流領域の流れ場の乱れを低減することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本開示の一態様に係る遠心ターボ機械は、
インペラと、
前記インペラの外周側に配置されたディフューザと、
前記ディフューザの外周に配置されて前記ディフューザから吐き出された流体を集めるボリュートと、前記ボリュートの終端と接続された吐出管とを有し、前記インペラ及び前記ディフューザを収容したケーシングと、を備え、
前記吐出管は、前記ボリュートの終端と接続された第1開口と、前記吐出管の延伸方向に沿って延びる第2開口とを有し、
前記ケーシングは、前記ディフューザの外周に配置されて、前記ボリュートの始端と前記吐出管の前記第2開口とを接続する舌部流路を形作る接続部を更に有するものである。
【発明の効果】
【0008】
本開示によれば、遠心ターボ機械において、吐出管内の吐出流れとボリュートからの逆流との合流領域の流れ場の乱れを低減できる。
【図面の簡単な説明】
【0009】
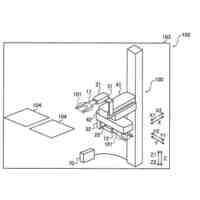
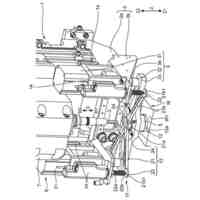
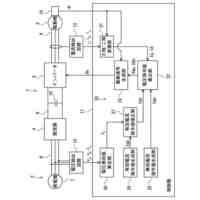
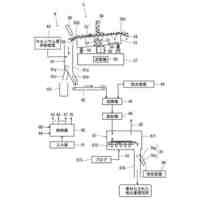
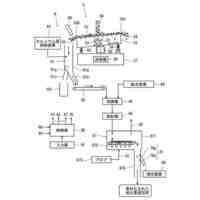
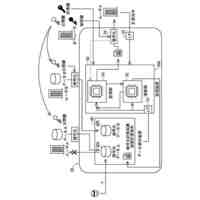
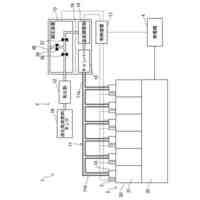
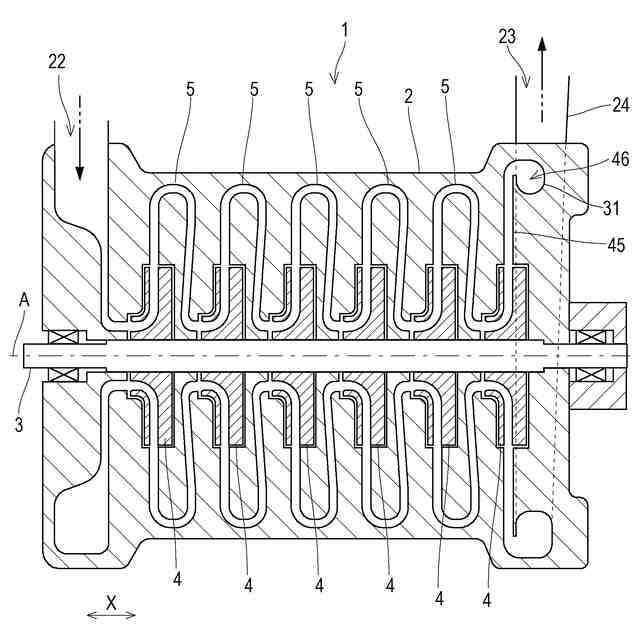
図1は、本開示の一態様に係る遠心ターボ圧縮機の全体構成を示す子午面図である。
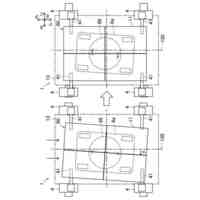
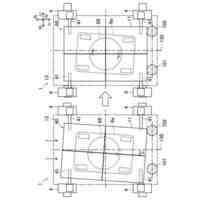
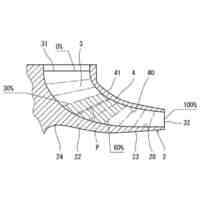
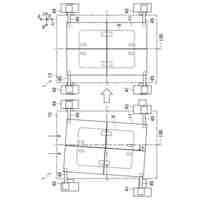
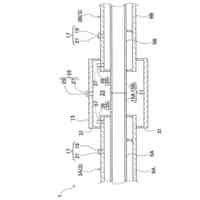
図2は、第1例に係るボリュート及びその周辺の径方向の断面図である。
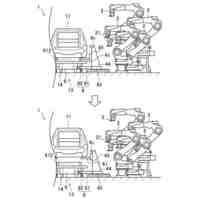
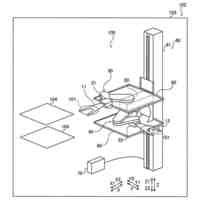
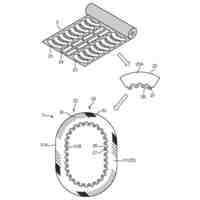
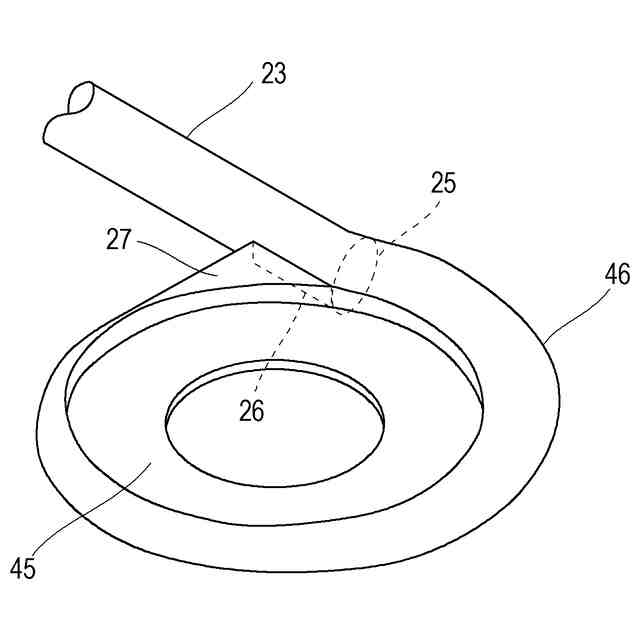
図3は、第1例に係るボリュート及びその周辺の流路の斜視図である
図4は、第2例に係るボリュート及びその周辺の径方向の断面図である。
図5は、第1例に係るボリュート及びその周辺の流体の流れを説明する図である。
図6は、従来のボリュートの数値解析モデルを示す図である。
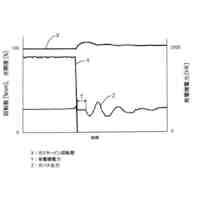
図7は、数値解析により得られた管中心断面のマッハ数分布図である。
【発明を実施するための形態】
【0010】
次に、図面を参照して本開示の実施の形態を説明する。ここでは、遠心ターボ機械の一例として、遠心ターボ圧縮機を用いて説明する。但し、本開示に係る遠心ターボ機械の構成は、圧縮機に限定されず、ポンプ、及び送風機などに適用されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
表面材
1か月前
川崎重工業株式会社
ロボット
1日前
川崎重工業株式会社
排ガス採取器
1か月前
川崎重工業株式会社
遠心ターボ機械
1日前
川崎重工業株式会社
ゼオライト触媒
1日前
川崎重工業株式会社
基板搬送ロボット
23日前
川崎重工業株式会社
基板搬送ロボット
23日前
川崎重工業株式会社
ロボットシステム
23日前
川崎重工業株式会社
ロボットシステム
23日前
川崎重工業株式会社
位置情報システム
23日前
川崎重工業株式会社
ロボットシステム
23日前
川崎重工業株式会社
基板搬送ロボット
23日前
川崎重工業株式会社
エンドエフェクタ
13日前
川崎重工業株式会社
基板搬送ロボット
23日前
川崎重工業株式会社
基板搬送ロボット
23日前
川崎重工業株式会社
クローズドインペラ
23日前
川崎重工業株式会社
正極活物質の再生方法
24日前
川崎重工業株式会社
液化ガス導入システム
1か月前
川崎重工業株式会社
環状フレームの成形方法
3日前
川崎重工業株式会社
ロボットシステム及びロボット
23日前
川崎重工業株式会社
電力供給システムおよびその制御方法
1か月前
川崎重工業株式会社
焼却灰の骨材化システムおよび骨材化方法
13日前
川崎重工業株式会社
焼却灰の骨材化システムおよび骨材化方法
13日前
川崎重工業株式会社
歯車装置の支持構造の診断装置及び診断方法
22日前
川崎重工業株式会社
水素の生産計画システムおよび生産計画方法
3日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
23日前
川崎重工業株式会社
白金族金属の可溶化方法及び金属の分離方法
1か月前
川崎重工業株式会社
ガスタービンエンジンの制御装置および制御方法
27日前
川崎重工業株式会社
移動体、給電システム及びワイヤレス式受電方法
14日前
川崎重工業株式会社
秘密計算システム、秘密計算方法及び秘密計算装置
今日
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
21日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
21日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
21日前
川崎重工業株式会社
異常診断装置、異常診断プログラムおよび異常診断方法
3日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
1か月前
ヤンマーホールディングス株式会社
燃料供給装置及びエンジンシステム
13日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ