TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025149369
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049968
出願日
2024-03-26
発明の名称
ロボットシステム及びその動作方法
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
B25J
13/00 20060101AFI20251001BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】1つのワークに対し同時に作業を行うことの可能な複数のロボットを備えたロボットシステムにおいて、複数のロボットの作業が互いに阻害されないようにする。
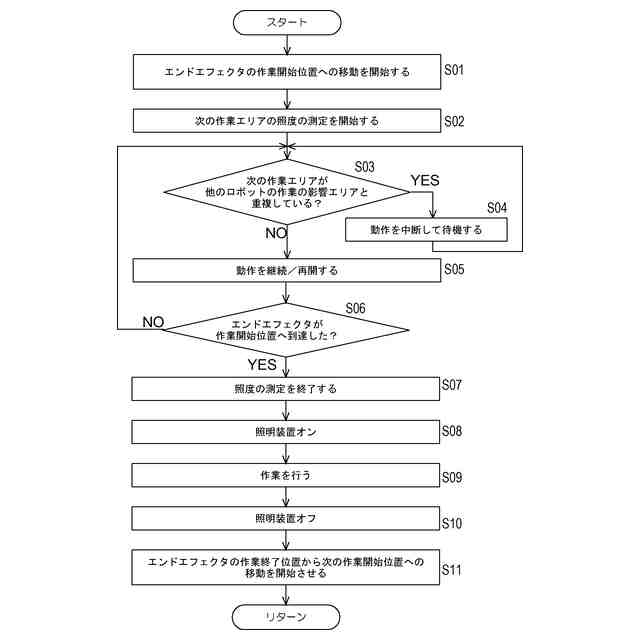
【解決手段】第1エンドエフェクタを有する第1ロボットと、第2エンドエフェクタを有する第2ロボットとを備えるロボットシステムにおいて、第1エンドエフェクタがワークに対し作業を行っている間にワークのうち第1エンドエフェクタの作用の影響を受ける影響エリアへ光を照射し、第2エンドエフェクタの作業開始前に、ワークのうち第2エンドエフェクタの次の作業エリアの照度を検出し、検出した照度に基づいて次の作業エリアが影響エリアと重複するか否かを判断し、重複していなければ第2エンドエフェクタが次の作業エリアに対し作業を行い、重複していれば当該重複が解消されるまで第2エンドエフェクタの次の作業エリアに対する作業を待機させる。
【選択図】図6
特許請求の範囲
【請求項1】
ワークに対して作業を行う第1エンドエフェクタと、前記ワークの特定のエリアに光を照射する照明装置と、前記第1エンドエフェクタ及び前記照明装置を移動可能に支持する第1アームと、を有する第1ロボットと、
前記第1ロボットの動作を制御する第1ロボットコントローラと、
前記ワークに対して作業を行う第2エンドエフェクタと、前記ワークの表面の照度を検出する光センサと、前記第2エンドエフェクタ及び前記光センサを移動可能に支持する第2アームと、を有する第2ロボットと、
前記第2ロボットの動作を制御する第2ロボットコントローラと、を備え、
前記第1ロボットコントローラは、前記第1エンドエフェクタに前記ワークに対し作業をさせ、前記第1エンドエフェクタの作業中に前記照明装置に前記ワークのうち前記第1エンドエフェクタの作用の影響を受ける影響エリアへ光を照射させるように構成されており、
前記第2ロボットコントローラは、前記第2エンドエフェクタの作業開始前に、前記光センサに前記ワークのうち前記第2エンドエフェクタの次の作業エリアの照度を検出させ、検出された照度に基づいて前記次の作業エリアが前記影響エリアと重複するか否かを判断し、重複していなければ前記第2エンドエフェクタに前記次の作業エリアに対し作業をさせ、重複していれば当該重複が解消されるまで前記第2エンドエフェクタの前記次の作業エリアに対する作業を待機させるように構成されている、
ロボットシステム。
続きを表示(約 970 文字)
【請求項2】
前記第2ロボットコントローラは、前記光センサで検出された照度が所定の閾値よりも大きい場合に前記次の作業エリアが前記影響エリアと重複すると判断する、
請求項1に記載のロボットシステム。
【請求項3】
前記照明装置は、明暗サイクルでパルス状に光を照射するパルス照明装置であって、
前記第2ロボットコントローラは、前記光センサで検出された照度がパルス状に変動している場合に前記次の作業エリアが前記影響エリアと重複すると判断する、
請求項1に記載のロボットシステム。
【請求項4】
前記照明装置は、明暗サイクルでパルス状に光を照射するパルス照明装置であって、
前記第2ロボットコントローラは、前記第1ロボットの識別情報と前記第1ロボットの前記照明装置から照射される光の前記明暗サイクルのパターンとを関連づけて記憶しており、前記光センサで検出された照度の変動パターンを認識し、前記変動パターンと前記明暗サイクルのパターンとの対応に基づいて前記影響エリアが前記第1ロボットの前記第1エンドエフェクタの作用により生成されたものであると判断する、
請求項1に記載のロボットシステム。
【請求項5】
ワークに対し作業を行う第1エンドエフェクタを有する第1ロボットと、前記ワークに対し作業を行う第2エンドエフェクタを有する第2ロボットとを備えるロボットシステムの動作方法であって、
前記第1エンドエフェクタが前記ワークに対し作業を行うこと、
前記第1エンドエフェクタの作業中に前記ワークのうち前記第1エンドエフェクタの作用の影響を受ける影響エリアへ光を照射すること、
前記第2エンドエフェクタの作業開始前に、前記ワークのうち前記第2エンドエフェクタの次の作業エリアの照度を検出すること、及び、
検出した照度に基づいて前記次の作業エリアが前記影響エリアと重複するか否かを判断し、重複していなければ前記第2エンドエフェクタが前記次の作業エリアに対し作業を行い、重複していれば当該重複が解消されるまで前記第2エンドエフェクタの前記次の作業エリアに対する作業を待機させること、を含む、
ロボットシステムの動作方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、1つのワークに対し同時に作業を行うことの可能な複数のロボットを備えたロボットシステムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
生産能力の向上や省スペース化のために、近接して配置された複数のロボットが共通の作業領域内で同時に作業を行うことがある。このような場合に、複数のロボットが干渉しないように、各ロボットに移動経路や動作タイミングが教示される。
【0003】
例えば、特許文献1に記載のロボットシステムでは、複数の教示再生方式ロボットが共有の作業領域を有するように配置され、各ロボットに始点から複数の経由点を通って終点まで障害物を避けて移動するための位置情報が教示される。ロボット同士の軌道が交差する領域が存在する場合には、当該領域に仮想的な障害物が設定され、複数のロボットのいずれもが当該領域を通過しないように、ロボットの経由点が再教示される。
【先行技術文献】
【特許文献】
【0004】
特開2018-144223号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
第1ロボット及び第2ロボットを含む複数のロボットが一つのワークに対して作業を行う場合に、第1ロボットと第2ロボットとが干渉しなくても、第2ロボットの作業が第1ロボットの作業によって阻害されることがある。例えば、第1ロボットのワークの第1部位に対する穿孔作業と、第2ロボットの当該ワークの第2部位に対する撮像作業とを同時に行う場合に、第1部位と第2部位とが近接していると第1ロボットから第1部位へ与えられた振動がワークを通じて第2部位へ伝わって、第2ロボットは振動する第2部位を撮像することとなる。その結果、第2ロボットの作業の質が低下してしまう。
【0006】
本開示は以上の事情に鑑みてなされたものであり、その目的は、1つのワークに対し同時に作業を行うことの可能な複数のロボットを備えたロボットシステムにおいて、第1ロボットの作業によって第2ロボットの作業が阻害されないようにすることにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本開示の一態様に係るロボットシステムは、
ワークに対して作業を行う第1エンドエフェクタと、前記ワークの特定のエリアに光を照射する照明装置と、前記第1エンドエフェクタ及び前記照明装置を移動可能に支持する第1アームと、を有する第1ロボットと、
前記第1ロボットの動作を制御する第1ロボットコントローラと、
前記ワークに対して作業を行う第2エンドエフェクタと、前記ワークの表面の照度を検出する光センサと、前記第2エンドエフェクタ及び前記光センサを移動可能に支持する第2アームと、を有する第2ロボットと、
前記第2ロボットの動作を制御する第2ロボットコントローラと、を備え、
前記第1ロボットコントローラは、前記第1エンドエフェクタに前記ワークに対し作業をさせ、前記第1エンドエフェクタの作業中に前記照明装置に前記ワークのうち前記第1エンドエフェクタの作用の影響を受ける影響エリアへ光を照射させるように構成されており、
前記第2ロボットコントローラは、前記第2エンドエフェクタの作業開始前に、前記光センサに前記ワークのうち前記第2エンドエフェクタの次の作業エリアの照度を検出させ、検出された照度に基づいて前記次の作業エリアが前記影響エリアと重複するか否かを判断し、重複していなければ前記第2エンドエフェクタに前記次の作業エリアに対し作業をさせ、重複していれば当該重複が解消されるまで前記第2エンドエフェクタの前記次の作業エリアに対する作業を待機させるように構成されているものである。
【0008】
また、本開示の一態様に係るロボットシステムの動作方法は、ワークに対し作業を行う第1エンドエフェクタを有する第1ロボットと、前記ワークに対し作業を行う第2エンドエフェクタを有する第2ロボットとを備えるロボットシステムの動作方法であって、
前記第1エンドエフェクタが前記ワークに対し作業を行うこと、
前記第1エンドエフェクタの作業中に前記ワークのうち前記第1エンドエフェクタの作用の影響を受ける影響エリアへ光を照射すること、
前記第2エンドエフェクタの作業開始前に、前記ワークのうち前記第2エンドエフェクタの次の作業エリアの照度を検出すること、及び、
検出した照度に基づいて前記次の作業エリアが前記影響エリアと重複するか否かを判断し、重複していなければ前記第2エンドエフェクタが前記次の作業エリアに対し作業を行い、重複していれば当該重複が解消されるまで前記第2エンドエフェクタの前記次の作業エリアに対する作業を待機させること、を含むものである。
【発明の効果】
【0009】
本開示によれば、1つのワークに対し同時に作業を行うことの可能な複数のロボットを備えたロボットシステムにおいて、第1ロボットの作業によって第2ロボットの作業が阻害されないようにすることができる。
【図面の簡単な説明】
【0010】
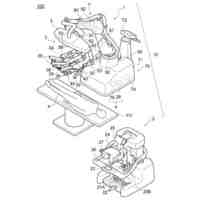
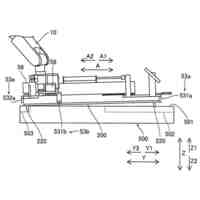
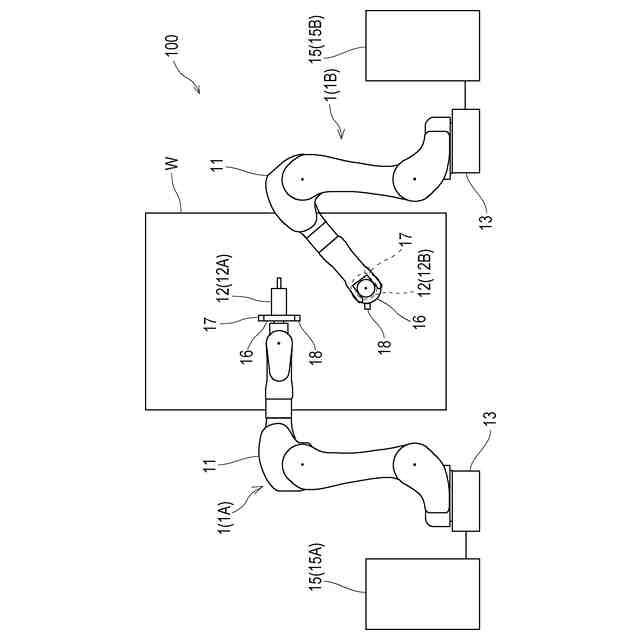
図1は、本開示の一実施形態に係るロボットシステムの概略構成を示す図である。
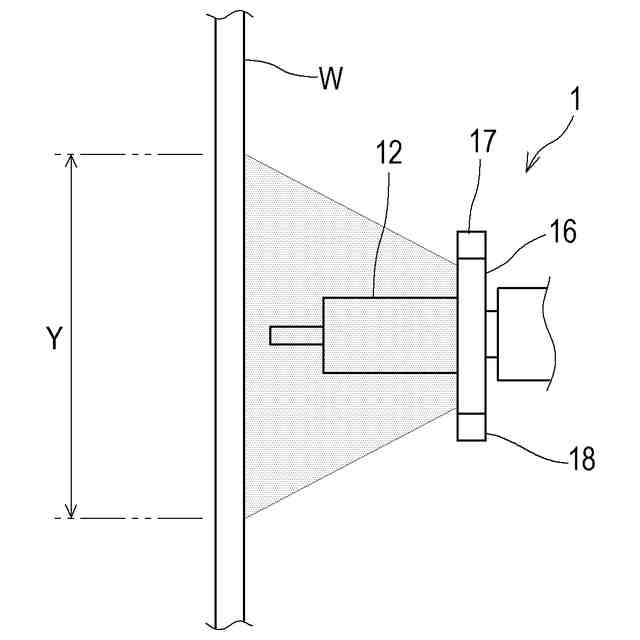
図2は、図1に示すロボットのアームの遠位端部分を示す図である。
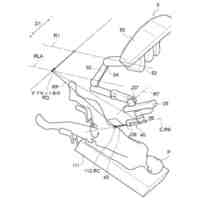
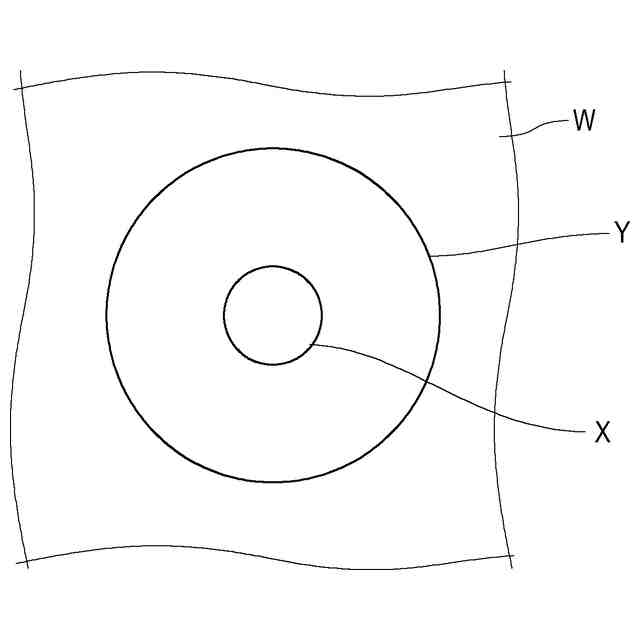
図3は、ワーク上の作業エリアと影響エリアとを説明する図である。
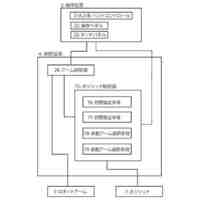
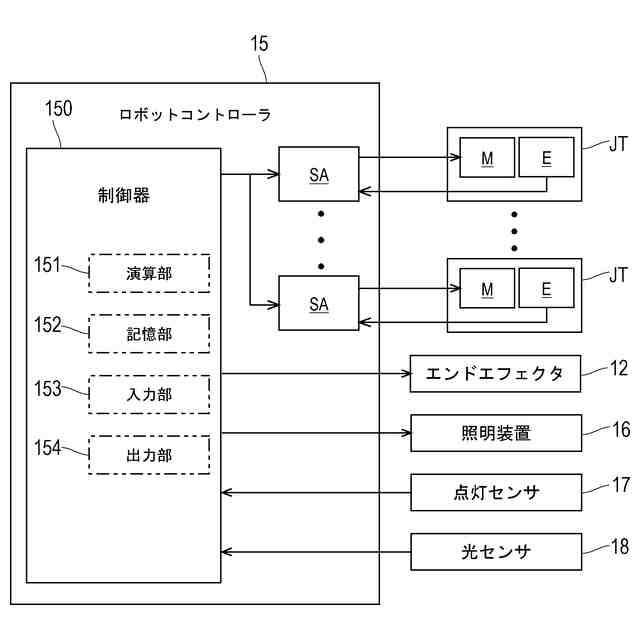
図4は、ロボットの制御系統の構成を示す図である。
図5は、ワーク上の或るエリアの照度の時系列変化の例を示す図である。
図6は、ロボットコントローラの処理の流れ図である。
図7は、第1ロボットの作業の影響エリアと第2ロボットの次の作業エリアXとが重複している様子を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
1日前
川崎重工業株式会社
断熱配管
1日前
川崎重工業株式会社
塗装システム
1日前
川崎重工業株式会社
ワーク搬送ロボット
1日前
川崎重工業株式会社
支援システムおよび支援方法
1日前
川崎重工業株式会社
経路作成方法及び経路作成装置
1日前
川崎重工業株式会社
アンモニア回収システム及び方法
1日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
1日前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
ワーク搬送ロボットおよびロボット制御方法
1日前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
1日前
川崎重工業株式会社
手術支援システム、手術支援方法および情報提供方法
1日前
川崎重工業株式会社
ワーク搬送ロボットおよびワーク搬送ロボットの制御方法
1日前
川崎重工業株式会社
ポート配置決定装置、手術ロボットシステムおよびその制御方法
1日前
個人
固定補助具
1か月前
個人
折りたたみ工具
1か月前
株式会社三協システム
製函機
1か月前
川崎重工業株式会社
ロボット
10日前
株式会社竹中工務店
補助セット
9日前
株式会社不二越
ロボット
9日前
株式会社三協システム
移載装置
1か月前
CKD株式会社
把持装置
1か月前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
ハンド
1日前
株式会社不二越
ロボット操作装置
1か月前
SMC株式会社
着脱装置
1か月前
日本精工株式会社
締結用工具
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
株式会社ミクロブ
把持装置
1か月前
工機ホールディングス株式会社
作業機
1日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
ARMA株式会社
ジョイントフレーム
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ