TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025150765
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051826
出願日
2024-03-27
発明の名称
ロボットの診断システム
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B25J
19/06 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
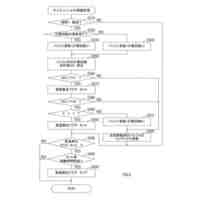
【課題】複数の支持ロボットがワークの支持を行う場合に、複数の支持ロボットの寿命を個別に診断する。
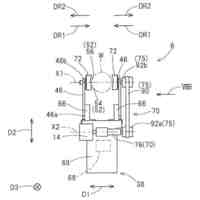
【解決手段】ロボットの診断システムは、第1支持機構40を有し、かつワーク(ボデー11)における第1部位に係合する第1支持機構によって、ワークを支持する第1支持ロボット(ロケータ4)と、第2支持機構を有し、かつワークにおける第1部位とは異なる第2部位に係合する第2支持機構によって、第1支持ロボットと共にワークを支持する第2支持ロボット(ロケータ4)と、第1支持ロボット及び第2支持ロボットがワークを支持する際の第1支持機構の動作パラメータ及び第2支持機構の動作パラメータに基づいて、第1支持機構の寿命及び第2支持機構の寿命を個別に診断する診断装置7と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
少なくとも一のモータを含む第1支持機構を有し、かつワークにおける第1部位に係合する前記第1支持機構によって、前記ワークを支持する第1支持ロボットと、
少なくとも一のモータを含む第2支持機構を有し、かつ前記ワークにおける前記第1部位とは異なる第2部位に係合する前記第2支持機構によって、前記第1支持ロボットと共に前記ワークを支持する第2支持ロボットと、
前記第1支持ロボット及び前記第2支持ロボットが前記ワークを支持する際の前記第1支持機構の動作パラメータ及び前記第2支持機構の動作パラメータに基づいて、前記第1支持機構の寿命及び前記第2支持機構の寿命を個別に診断する診断装置と、
を備える、ロボットの診断システム。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載のロボットの診断システムにおいて、
前記診断装置は、前記第1支持ロボット及び前記第2支持ロボットが前記ワークを支持する度に、前記第1支持機構の動作パラメータ及び前記第2支持機構の動作パラメータを記憶するメモリを有し、
前記診断装置は、前記メモリの情報に基づいて、前記第1支持機構の寿命及び前記第2支持機構の寿命を個別に診断する、
ロボットの診断システム。
【請求項3】
請求項2に記載のロボットの診断システムにおいて、
前記第1支持ロボット及び前記第2支持ロボットに接続され、かつ前記第1支持機構及び前記第2支持機構へ電流を供給するコントローラをさらに備え、
前記第1支持ロボットは、第1識別情報を前記コントローラへ出力し、前記第2支持ロボットは、第2識別情報を前記コントローラへ出力する、
ロボットの診断システム。
【請求項4】
請求項1に記載のロボットの診断システムにおいて、
前記動作パラメータは、前記第1支持機構及び前記第2支持機構それぞれの前記モータへ供給される電流値に関するパラメータである、
ロボットの診断システム。
【請求項5】
請求項1に記載のロボットの診断システムにおいて、
前記動作パラメータは、前記第1支持機構及び前記第2支持機構それぞれの前記モータの回転数に関するパラメータである、
ロボットの診断システム。
【請求項6】
請求項4又は5に記載のロボットの診断システムにおいて、
前記第1支持ロボット及び前記第2支持ロボットは、3軸直交ロボットであり、
前記第1支持機構及び前記第2支持機構はそれぞれ、前記ワークを下側から支持する係合部を、水平面内において互いに直交するX軸及びY軸、並びに、鉛直なZ軸それぞれの方向へ変位させ、
前記第1支持機構及び前記第2支持機構はそれぞれ、前記X軸に対応する第1モータ、前記Y軸に対応する第2モータ、及び前記Z軸に対応する第3モータを含む、
ロボットの診断システム。
【請求項7】
請求項1に記載のロボットの診断システムにおいて、
前記第1支持ロボット及び前記第2支持ロボットは、搬送機構によって作業エリアに搬送されかつ前記搬送機構から引き渡された前記ワークを、前記作業エリアにおいて、作業ロボットが前記ワークに対する作業を行っている最中に支持する、
ロボットの診断システム。
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、ロボットの診断システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、従来のロボットシステムが記載されている。従来のロボットシステムは、自動車の車体の組み立てラインに採用されている。従来のロボットシステムには、モニタリング装置が採用されている。
【0003】
モニタリング装置は、組み立てラインにおいて動作及び休止区間が繰り返し駆動される複数のモータを監視する。モニタリング装置は、初期データ格納部と、観測データ格納部と、モニタリング情報提供部とを含む。初期データ格納部は、モータ別に、モータの正常状態で測定した時間による電流値を基に、動作区間の時間長さ、動作区間のピーク電流、動作区間に含まれている定速区間の平均電流、動作区間を分割したサブ区間別電流の積分面積に関する情報をモータの初期データとして格納する。観測データ格納部は、モータの動作時に観測される動作区間ごとに、動作区間の時間長さ、ピーク電流、定速区間の平均電流、サブ区間別の積分面積に関する情報を監視因子別観測データとして格納する。モニタリング情報提供部は、観測データの各情報を、初期データの各情報に対応して既に設定された臨界レベルと個別に比較して、監視因子別にモータの状態モニタリング情報を提供する。従来のモニタリング装置は、ロボットシステムのモータの故障を検知できる。
【先行技術文献】
【特許文献】
【0004】
特表2018-520947号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ロボットが長期間動作することにより、モータを含む基幹部品は劣化する。基幹部品の劣化は、ロボットの動作精度を低下させる。また、基幹部品の劣化は、ロボットの故障を招く場合もある。ロボットに対して、適切なタイミングでのメンテナンスが必要である。ロボットの動作時のデータを収集することは、基幹部品の劣化の予測を可能にする。基幹部品の劣化が予測できれば、保守員は、ロボットを適切なタイミングでメンテナンスできる。
【0006】
ところで、ロボットがワークに対して作業を行う作業エリアにおいて、複数の支持ロボットが協働することにより、ワークの支持と位置決めとを行う場合がある。例えば、複数の支持ロボットがワークの互いに異なる部位に係合すると共に、複数の支持ロボットが同期することにより、ワークを持ち上げて支持する。
【0007】
ワークを支持する複数の支持ロボットに、負荷が均等にかかるとは限らない。例えば、複数の支持ロボットがワークを持ち上げるタイミングがずれると、先にワークを持ち上げた支持ロボットにかかる負荷が相対的に大きくなってしまう。また、複数の支持ロボットに支持されているワークの重心位置が、複数の支持ロボット間の中央からずれていると、特定の支持ロボットにかかる負荷が相対的に大きくなってしまう。
【0008】
複数の支持ロボットは、実質的に同じ動作を行っていても、劣化の進行には、ばらつきが生じる場合がある。複数の支持ロボットの寿命を個別に診断することが求められる。
【課題を解決するための手段】
【0009】
ここに開示する技術は、ロボットの診断システムに係る。ロボットの診断システムは、
少なくとも一のモータを含む第1支持機構を有し、かつワークにおける第1部位に係合する前記第1支持機構によって、前記ワークを支持する第1支持ロボットと、
少なくとも一のモータを含む第2支持機構を有し、かつ前記ワークにおける前記第1部位とは異なる第2部位に係合する前記第2支持機構によって、前記第1支持ロボットと共に前記ワークを支持する第2支持ロボットと、
前記第1支持ロボット及び前記第2支持ロボットが前記ワークを支持する際の前記第1支持機構の動作パラメータ及び前記第2支持機構の動作パラメータに基づいて、前記第1支持機構の寿命及び前記第2支持機構の寿命を個別に診断する診断装置と、
を備える。
【発明の効果】
【0010】
ロボットの診断システムは、協働してワークを支持する複数の支持ロボットの寿命を、個別に診断できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
廃棄物処理システム
今日
個人
折りたたみ工具
1か月前
個人
フラワーホッチキス。
3日前
川崎重工業株式会社
ロボット
16日前
株式会社三協システム
製函機
1か月前
株式会社不二越
ロボット
15日前
CKD株式会社
把持装置
1か月前
株式会社三協システム
移載装置
1か月前
株式会社竹中工務店
補助セット
15日前
川崎重工業株式会社
ハンド
7日前
株式会社ミクロブ
把持装置
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
SMC株式会社
着脱装置
1か月前
工機ホールディングス株式会社
作業機
7日前
株式会社不二越
移動ロボットシステム
18日前
トヨタ自動車株式会社
ロボット
10日前
本田技研工業株式会社
装置
21日前
川崎重工業株式会社
塗装システム
7日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
エッジ仕上げ装置
28日前
株式会社不二越
垂直多関節ロボット
29日前
トヨタ自動車株式会社
軌道生成装置
10日前
工機ホールディングス株式会社
作業機
7日前
アネックスツール株式会社
ドライバービット
14日前
ライオン株式会社
移載システム
1か月前
シンフォニアテクノロジー株式会社
搬送装置
18日前
大和ハウス工業株式会社
ねじ回転工具
1か月前
株式会社マキタ
回転打撃工具
10日前
ワールド技研株式会社
ロボットセル装置
15日前
株式会社不二越
ロボットに用いる伝送路
今日
川崎重工業株式会社
ワーク搬送ロボット
7日前
セイコーエプソン株式会社
ロボット
14日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
28日前
山九株式会社
レンチ保持治具
10日前
NTN株式会社
ハンド
16日前
トヨタ自動車株式会社
ロボットの制御装置
14日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ