TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025154560
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057630
出願日
2024-03-29
発明の名称
手術支援システムおよび手術支援方法
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
A61B
34/35 20160101AFI20251002BHJP(医学または獣医学;衛生学)
要約
【課題】複数のロボットアームを含む手術支援システムを用いた手術を行いやすくする。
【解決手段】一態様に係る手術支援システムは、内視鏡カメラと、手術器具と、先端部に内視鏡カメラが取り付けられる、複数の自由度を有するカメラ用アーム、および、先端部に手術器具が取り付けられる、複数の自由度を有する器具用アーム、を含む複数のロボットアームと、内視鏡カメラが撮像する内視鏡画像を表示するディスプレイと、ユーザの操作を受け付ける操作入力装置と、処理回路と、を備える手術支援システムであって、処理回路は、患者の体における手術器具を用いた手術の対象である手術対象を特定すること、および、操作入力装置に対するユーザの操作に応じて、複数のロボットアームを動作させること、を実行するように構成されている。
【選択図】図8
特許請求の範囲
【請求項1】
内視鏡カメラと、
手術器具と、
先端部に前記内視鏡カメラが取り付けられる、複数の自由度を有するカメラ用アーム、および、先端部に前記手術器具が取り付けられる、複数の自由度を有する器具用アーム、を含む複数のロボットアームと、
前記内視鏡カメラが撮像する内視鏡画像を表示するディスプレイと、
ユーザの操作を受け付ける操作入力装置と、
処理回路と、を備える手術支援システムであって、
前記処理回路は、
患者の体における前記手術器具を用いた手術の対象である手術対象を特定すること、および、
前記操作入力装置に対する前記ユーザの操作に応じて、前記複数のロボットアームを動作させること、を実行するように構成されている、手術支援システム。
続きを表示(約 1,400 文字)
【請求項2】
前記処理回路は、前記内視鏡カメラが前記患者の体内で撮像した内視鏡画像を示す画像情報を取得すること、を実行するように構成され、
前記処理回路が前記手術対象を特定することは、前記処理回路が、前記画像情報に基づいて、前記内視鏡画像における前記手術対象の位置を特定することを含む、請求項1に記載の手術支援システム。
【請求項3】
前記処理回路は、前記手術器具を用いて行われる手術の内容に関する手術内容情報を取得することを実行するように構成され、
前記処理回路が前記手術対象を特定することは、前記処理回路が、前記画像情報および前記手術内容情報に基づいて、前記内視鏡画像における前記手術対象の位置を特定することを含む、請求項2に記載の手術支援システム。
【請求項4】
前記処理回路は、
前記患者と前記ロボットアームとの間の相対位置を示す相対位置情報を取得することを実行するように構成され、
前記処理回路が前記手術対象を特定することは、前記処理回路が、前記相対位置情報に基づいて、前記ロボットアームに対する前記手術対象の位置を特定することを含む、請求項1または2に記載の手術支援システム。
【請求項5】
前記処理回路は、ユーザにより指定される領域を、前記手術対象として特定することを実行するように構成されている、請求項1または2に記載の手術支援システム。
【請求項6】
前記処理回路は、特定した前記手術対象に基づいて、前記ロボットアームの動作を制御すること、を実行するように構成されている、請求項1または2に記載の手術支援システム。
【請求項7】
前記処理回路は、特定した前記手術対象に基づいて、前記内視鏡画像の所定の位置に前記手術対象がくるように、前記カメラ用アームおよび前記内視鏡カメラの一方または双方の動作を制御すること、を実行するように構成されている、請求項1または2に記載の手術支援システム。
【請求項8】
前記処理回路は、特定した前記手術対象に基づいて、前記内視鏡画像内に前記手術器具の少なくとも一部が含まれるように、前記器具用アームおよび前記手術器具の一方または双方の動作を制御すること、を実行するように構成されている、請求項1または2に記載の手術支援システム。
【請求項9】
前記処理回路は、
特定した前記手術対象に基づいて、前記操作入力装置が受け付ける操作として推奨される推奨操作を推定すること、
推定した前記推奨操作の内容を示す前記推奨操作情報を前記ディスプレイに表示させること、
を実行するように構成されている、請求項1または2に記載の手術支援システム。
【請求項10】
前記処理回路は、
前記ロボットアームが、前記推奨操作に対応する動作である推奨動作を自動で実行することを許可するか否かを判定すること、
前記ロボットアームが前記推奨動作を自動で実行することを許可することが判定される場合、前記推奨動作を実行するよう前記ロボットアームの動作を制御すること、
を実行するように構成されている、請求項9に記載の手術支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、手術支援システムおよび手術支援方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1には、身体的医療要素固定システムが開示されている。このシステムは、命令を記憶するメモリと、前記命令を実行するように構成されるプロセッサを含む。プロセッサは、患者の内部空間の画像であって内部空間内の解剖学的表面上に位置付けられた身体的医療要素を描写する画像データにアクセスするステップと、身体的医療要素上に基準マーカを描写する、画像内の領域を識別するステップを実施する。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開第2021/0153959号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
手術者の手術を支援するための手術支援システムおよび手術支援方法として、より改善されたシステムおよび方法が望まれる。
【0005】
そこで、本開示は、複数のロボットアームを含む手術支援システムを用いた手術を行いやすくすることができる手術支援システムおよび手術支援方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係る手術支援システムは、内視鏡カメラと、手術器具と、先端部に前記内視鏡カメラが取り付けられる、複数の自由度を有するカメラ用アーム、および、先端部に前記手術器具が取り付けられる、複数の自由度を有する器具用アーム、を含む複数のロボットアームと、前記内視鏡カメラが撮像する内視鏡画像を表示するディスプレイと、ユーザの操作を受け付ける操作入力装置と、処理回路と、を備える手術支援システムであって、前記処理回路は、患者の体における前記手術器具を用いた手術の対象である手術対象を特定すること、および、前記操作入力装置に対する前記ユーザの操作に応じて、前記複数のロボットアームを動作させること、を実行するように構成されている。
【0007】
本開示の一態様に係る手術支援方法は、先端部に手術器具が取り付けられる、複数の自由度を有するロボットアームと、処理回路と、を備える手術支援システムを用いた手術を支援するための手術支援方法であって、前記処理回路により、前記患者の体内で撮像した内視鏡画像を示す画像情報を取得すること、前記処理回路により、前記画像情報に基づいて、前記内視鏡画像における患者の体における前記手術器具を用いた手術の対象である手術対象を特定すること、を含む。
【0008】
本開示の別の態様に係る手術支援システムは、複数の自由度をそれぞれ有する複数のロボットアームと、前記複数のロボットアームの先端部にそれぞれ取り付けられる複数の医療器具と、ユーザの操作を受け付ける操作入力装置と、前記操作入力装置に対する前記ユーザの操作に応じて、前記複数のロボットアームを動作させる処理回路と、を備える手術支援システムであって、前記処理回路は、前記手術器具を用いた手術の状況を示す手術状況情報を取得することと、前記手術状況情報が示す手術の状況において前記操作入力装置が受け付ける操作として推奨される推奨操作を推定するための機械学習を行った学習済みモデルに、前記手術状況情報を含む入力情報を入力することで、前記推奨操作の内容を示す推奨操作情報を当該学習モデルから取得することと、を実行するように構成されている。
【発明の効果】
【0009】
本開示によれば、複数のロボットアームを含む手術支援システムを用いた手術を行いやすくすることができる手術支援システムおよび手術支援方法を提供することができる。
【図面の簡単な説明】
【0010】
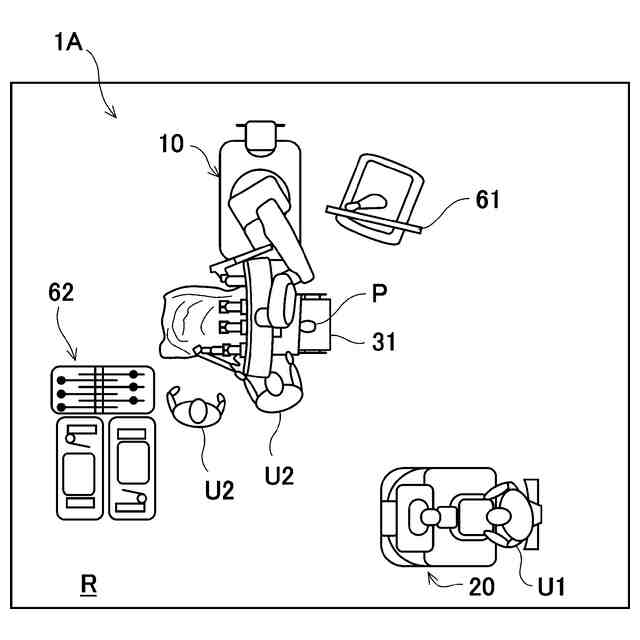
第1実施形態に係る手術支援システムの構成を説明するための図である。
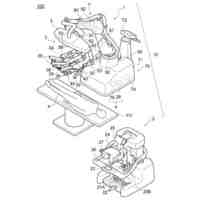
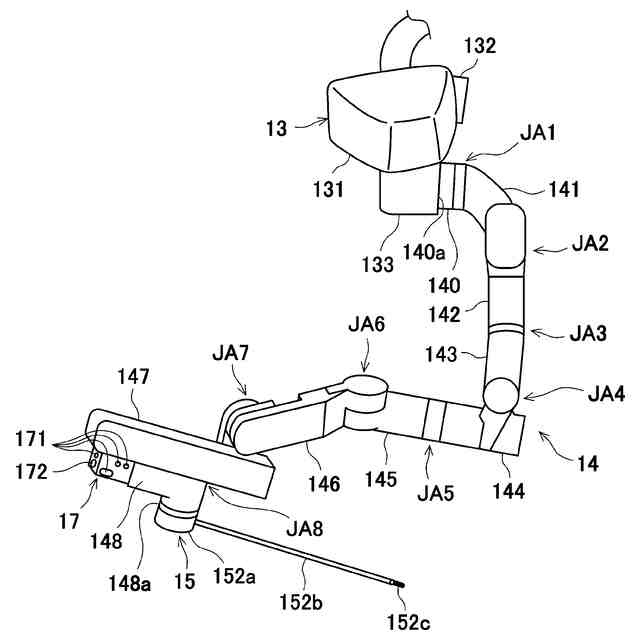
手術支援ロボットの構成の一例を説明する図である。
図2の手術支援ロボットにおけるアームベースとアームと医療器具とを拡大した斜視図である。
手術器具のツールの一例の拡大斜視図である。
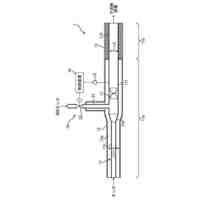
内視鏡カメラの斜視図である。
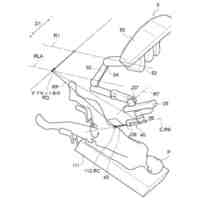
遠隔操作装置の斜視図である。
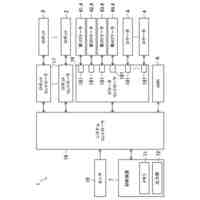
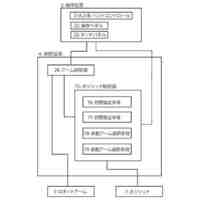
第1実施形態に係る手術支援システムの制御系統の構成の一例を示すブロック図である。
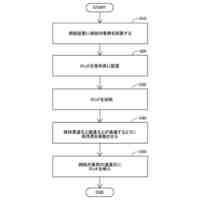
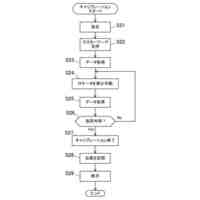
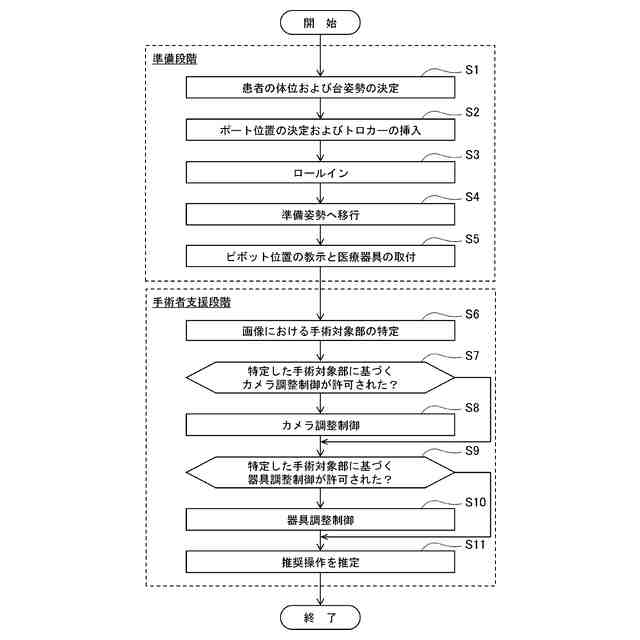
手術実施手順の第1例の流れを示すフローチャートである。
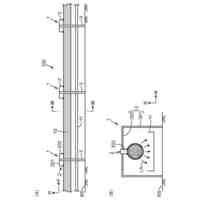
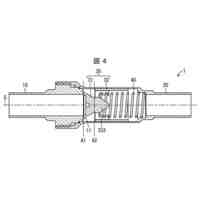
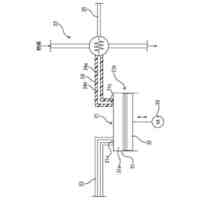
トロッカーを説明する図である。
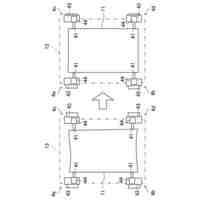
ロールインを説明する図である。
ピボット位置の教示を説明する図である。
トロッカーに挿入された状態の医療器具の動きを説明する図である。
遠隔操作装置のディスプレイに表示される画面の一例である。
遠隔操作装置のディスプレイに表示される画面の一例である。
遠隔操作装置のディスプレイに表示される画面の一例である。
遠隔操作装置のディスプレイに表示される画面の一例である。
遠隔操作装置のディスプレイに表示される画面の一例である。
第2実施形態に係る手術支援システムの構成を説明するための図である。
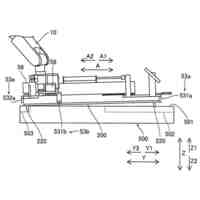
手術室を側方から見た、手術台装置および環境情報取得装置を説明するための図である。
第2実施形態に係る手術支援システムの制御系統の構成の一例を示すブロック図である。
手術実施手順の第2例の流れを示すフローチャートである。
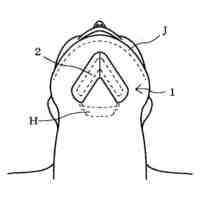
患者の3次元モデルを説明する図である。
手術対象の位置座標の特定を説明する図である。
遠隔操作装置のディスプレイに表示される画面の一例である。
遠隔操作装置のディスプレイに表示される画面の一例である。
遠隔操作装置のディスプレイに表示される画面の一例である。
遠隔操作装置のディスプレイに表示される画面の一例である。
遠隔操作装置のディスプレイに表示される画面の一例である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
今日
川崎重工業株式会社
断熱配管
今日
川崎重工業株式会社
塗装システム
今日
川崎重工業株式会社
監視システム
1日前
川崎重工業株式会社
配管の支持構造
1日前
川崎重工業株式会社
ロボットシステム
1日前
川崎重工業株式会社
ロボットシステム
1日前
川崎重工業株式会社
ワーク搬送ロボット
今日
川崎重工業株式会社
極低温流体用配管設備
2日前
川崎重工業株式会社
締結方法及び締結装置
7日前
川崎重工業株式会社
ロボットの診断システム
1日前
株式会社キッツ
逆流防止弁
1日前
川崎重工業株式会社
支援システムおよび支援方法
今日
川崎重工業株式会社
経路作成方法及び経路作成装置
今日
川崎重工業株式会社
アンモニア回収システム及び方法
今日
川崎重工業株式会社
配管の接続構造および配管システム
3日前
川崎重工業株式会社
ロボットシステム及びその動作方法
2日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
今日
川崎重工業株式会社
ロボットハンドおよびロボットシステム
今日
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
今日
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
今日
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
今日
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
今日
川崎重工業株式会社
ワーク搬送ロボットおよびロボット制御方法
今日
川崎重工業株式会社
油圧ショベルの油圧システムおよびブーム制御弁
3日前
川崎重工業株式会社
ロボットシステムの制御方法及びロボットシステム
1日前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
今日
川崎重工業株式会社
手術支援システム、手術支援方法および情報提供方法
今日
川崎重工業株式会社
ワーク搬送ロボットおよびワーク搬送ロボットの制御方法
今日
川崎重工業株式会社
ポート配置決定装置、手術ロボットシステムおよびその制御方法
今日
川崎重工業株式会社
極低温用圧縮設備、及びそれを備えるボイルオフガス液化システム
2日前
川崎重工業株式会社
手術支援ロボット、手術支援システムおよび手術支援ロボットの制御方法
2日前
個人
短下肢装具
2か月前
個人
嚥下鍛錬装置
3か月前
個人
前腕誘導装置
2か月前
個人
洗井間専家。
6か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ