TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025154591
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057683
出願日
2024-03-29
発明の名称
経路作成方法及び経路作成装置
出願人
川崎重工業株式会社
代理人
個人
主分類
G01C
21/34 20060101AFI20251002BHJP(測定;試験)
要約
【課題】エージェントがターゲットを訪問する経路を作成する方法であって、かつ、適切な経路を効率的に作成可能な方法を提供する。
【解決手段】経路作成方法では、以下の処理を行って、エージェントに対して、複数のターゲットを訪問する訪問経路を作成する。複数のターゲットをクラスタリングして、複数のクラスタに分類する。エージェントのクラスタに対する割当ての優先度、又は、エージェントによるクラスタの訪問順序の優先度を含む優先情報を作成する。ターゲットの位置、エージェントの位置、及び優先情報に基づいて、エージェントに対して訪問経路の候補である候補経路を作成する。候補経路を評価するための指標である評価指標に基づいて候補経路を評価する。候補経路の評価結果に基づいて、1又は複数の候補経路を訪問経路として選択する。
【選択図】図2
特許請求の範囲
【請求項1】
エージェントに対して、複数のターゲットを訪問する訪問経路を作成する経路作成方法において、
複数の前記ターゲットをクラスタリングして、複数のクラスタに分類し、
以下の条件1から条件3を満たす優先情報を作成し、
条件1:経路探索を補助する情報である
条件2:クラスタ毎に作成される情報である
条件3:前記エージェントの前記クラスタに対する割当ての優先度、又は、前記エージェントによる前記クラスタの訪問順序の優先度を含む
前記ターゲットの位置、エージェントの位置、及び前記優先情報に基づいて、前記エージェントに対して前記訪問経路の候補である候補経路を作成し、
前記候補経路を評価するための指標である評価指標に基づいて前記候補経路を評価し、
前記候補経路の評価結果に基づいて、1又は複数の前記候補経路を前記訪問経路として選択する、経路作成方法。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の経路作成方法であって、
前記訪問経路を作成する対象の前記エージェントが複数存在し、
前記優先情報は、前記エージェントと前記クラスタの組合せ毎に作成され、
前記優先情報は、前記エージェントの前記クラスタに対する割当ての前記優先度を含み、
前記候補経路の作成時において、前記優先度に応じて、当該クラスタに所属する前記ターゲットを訪問するか否かを決定する、経路作成方法。
【請求項3】
請求項2に記載の経路作成方法であって、
同一の前記クラスタに対して、前記エージェント毎に異なる前記優先度が設定される、経路作成方法。
【請求項4】
請求項3に記載の経路作成方法であって、
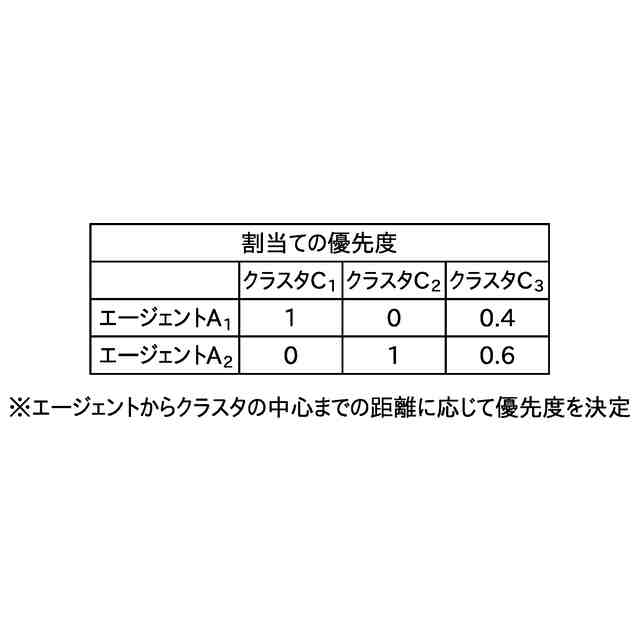
前記クラスタに対して、当該クラスタと対象の前記エージェントの距離に応じた前記優先度が設定される、経路作成方法。
【請求項5】
請求項3に記載の経路作成方法であって、
前記候補経路の作成時において、1つの前記クラスタに所属する複数の前記ターゲットに、それぞれ異なる前記エージェントが割り当てられることを許容する、経路作成方法。
【請求項6】
請求項1に記載の経路作成方法であって、
前記優先情報が前記エージェントによる前記クラスタの訪問順序の前記優先度を含み、
前記候補経路の作成時において、前記優先度に応じた順序で当該クラスタに所属する前記ターゲットを訪問する前記候補経路を作成する、経路作成方法。
【請求項7】
請求項6に記載の経路作成方法であって、
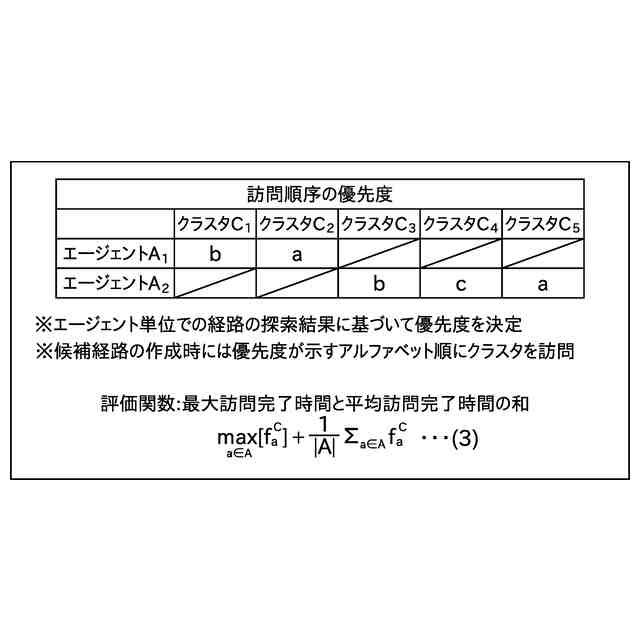
複数の前記クラスタの代表位置を訪問する経路探索を行って、前記クラスタの訪問順序の前記優先度含む優先情報を作成し、
前記クラスタに所属する全ての前記ターゲットを訪問する経路探索を行って前記クラスタ内の経路を作成し、
前記優先度に基づく前記クラスタの訪問順序と、前記クラスタ内の経路、とを組み合わせることにより、前記候補経路を作成する、経路作成方法。
【請求項8】
請求項7に記載の経路作成方法であって、
前記訪問経路を作成する対象の前記エージェントが複数存在し、
前記エージェント毎に前記候補経路を作成する、経路作成方法。
【請求項9】
請求項1に記載の経路作成方法であって、
前記訪問経路は、前記ターゲットに対してタスクを実行するための経路であり、
前記ターゲットの周囲に、位置に応じた評価値を設定し、
前記ターゲットに対してタスクを実行する位置に設定された評価値に基づいて、前記候補経路を評価する、経路作成方法。
【請求項10】
請求項9に記載の経路作成方法であって、
前記訪問経路は、前記ターゲットに対してセンサを用いた計測を行うための経路であり、
前記ターゲットの周囲に、前記センサの特性に応じて前記評価値を分布させ、
前記ターゲットに対して計測を実行する位置に設定された前記評価値に基づいて、前記候補経路を評価する、経路作成方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本出願は、主として、エージェントに対して、複数のターゲットを訪問する訪問経路を作成する経路作成方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1は、配送者に対して複数の配送先を割り当てて配送先を辿るルートを作成する方法を開示する。具体的には、割り当ての対象となる複数の配送先をクラスタリングし、各配送先を配送クラスタに所属させる。次に、配送者を配送クラスタに割り当てる。最後に、配送者を割り当てた配送クラスタに所属する配送先を特定し、特定した配送先を辿る経路を作成する。
【先行技術文献】
【特許文献】
【0003】
特開2023-39451号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の配送管理方法では、配送者を配送先に割り当てるためだけにクラスタリングを用いる。特許文献1では、配送クラスタを用いて適切な経路を効率的に作成するための処理は開示されていない。従って、特許文献1ではクラスタリングが十分に活用されておらず、改善の余地がある。また、この課題は、配送に限られない。この課題は、エージェントがターゲットを訪問する様々な事象に共通の課題である。
【0005】
本出願は以上の事情に鑑みてされたものであり、その主要な目的は、エージェントがターゲットを訪問する経路を作成する方法であって、かつ、適切な経路を効率的に作成可能な方法を提供することにある。
【課題を解決するための手段】
【0006】
本出願の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0007】
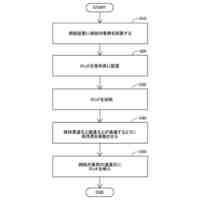
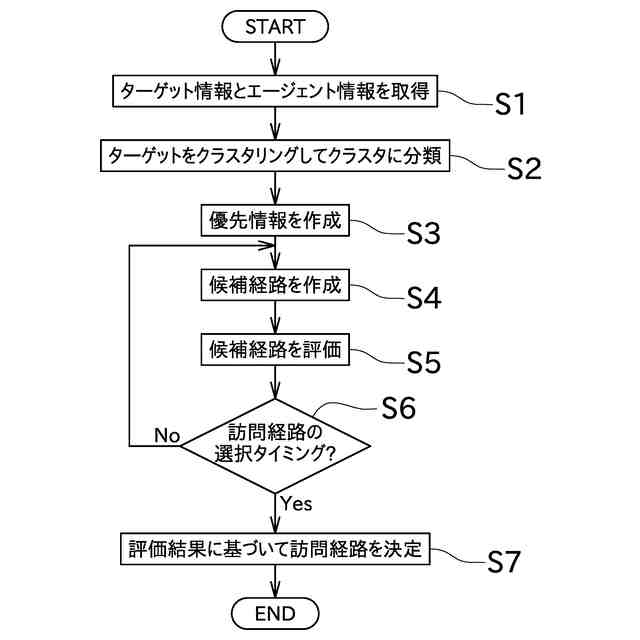
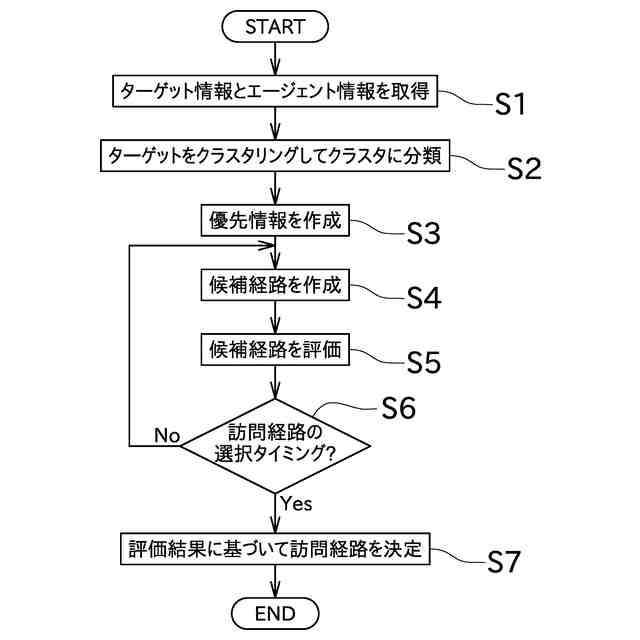
本出願の第1の観点によれば、以下の経路作成方法が提供される。経路作成方法は、以下の処理を行って、エージェントに対して、複数のターゲットを訪問する訪問経路を作成する方法である。複数の前記ターゲットをクラスタリングして、複数のクラスタに分類する。以下の条件1から条件3を満たす優先情報を作成する。条件1は、優先情報が経路探索を補助する情報である。条件2は、優先情報がクラスタ毎に作成される情報である。条件3は、優先情報が前記エージェントの前記クラスタに対する割当ての優先度、又は、前記エージェントによる前記クラスタの訪問順序の優先度を含む情報である。前記ターゲットの位置、エージェントの位置、及び前記優先情報に基づいて、前記エージェントに対して前記訪問経路の候補である候補経路を作成する。前記候補経路を評価するための指標である評価指標に基づいて前記候補経路を評価する。前記候補経路の評価結果に基づいて、1又は複数の前記候補経路を前記訪問経路として選択する。
【0008】
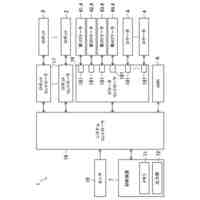
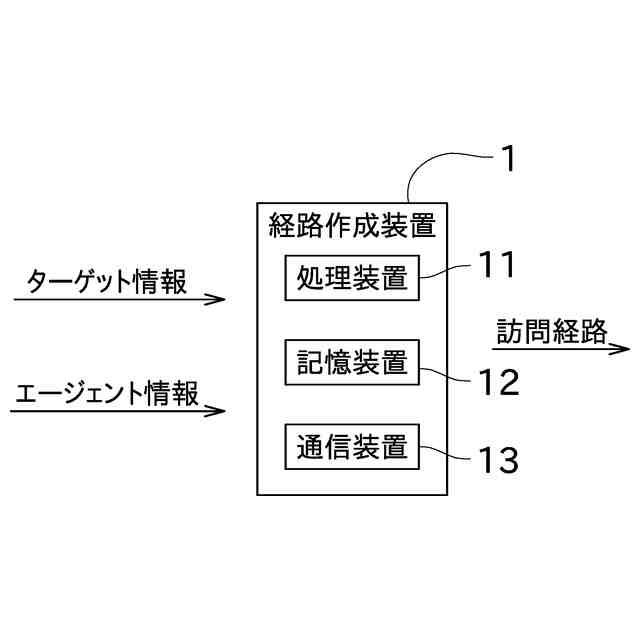
本出願の第2の観点によれば、以下の構成の経路作成装置が提供される。即ち、経路作成装置は、通信装置と、処理装置と、を備える。前記通信装置は、ターゲット情報及びエージェント情報を取得する。前記処理装置は、前記ターゲット情報及び前記エージェント情報に基づいて、エージェントに対して、複数のターゲットを訪問する訪問経路を作成する。処理装置は、複数の前記ターゲットをクラスタリングして、複数のクラスタに分類する。処理装置は、以下の条件1から条件3を満たす優先情報を作成する。条件1は、優先情報が経路探索を補助する情報である。条件2は、優先情報がクラスタ毎に作成される情報である。条件3は、優先情報が前記エージェントの前記クラスタに対する割当ての優先度、又は、前記エージェントによる前記クラスタの訪問順序の優先度を含む情報である。処理装置は、前記ターゲットの位置、エージェントの位置、及び前記優先情報に基づいて、前記エージェントに対して前記訪問経路の候補である候補経路を作成する。処理装置は、前記候補経路を評価するための指標である評価指標に基づいて前記候補経路を評価する。処理装置は、前記候補経路の評価結果に基づいて、1又は複数の前記候補経路を前記訪問経路として選択する。
【発明の効果】
【0009】
本出願によれば、エージェントがターゲットを訪問する経路を作成する方法であって、かつ、適切な経路を効率的に作成できる。
【図面の簡単な説明】
【0010】
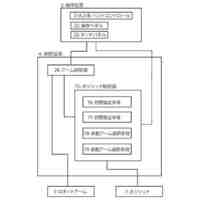
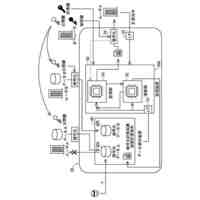
本出願の一実施形態に係る経路作成装置のブロック図。
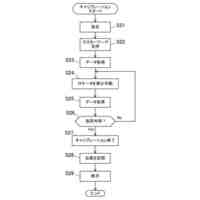
経路作成方法のフローチャート。
比較例での経路作成の流れの概要図。
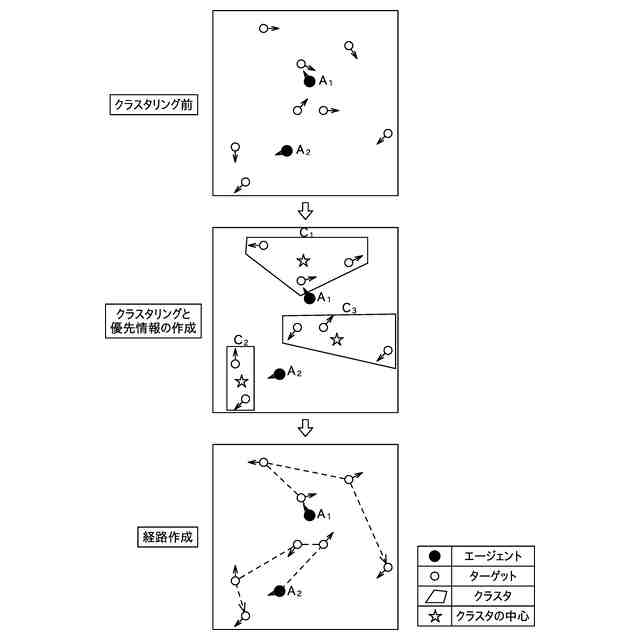
エージェントのクラスタに対する割当ての優先度が設定される場合の経路作成の流れの概要図。
エージェントのクラスタに対する割当ての優先度を示す表。
経路探索で用いる式を説明する図。
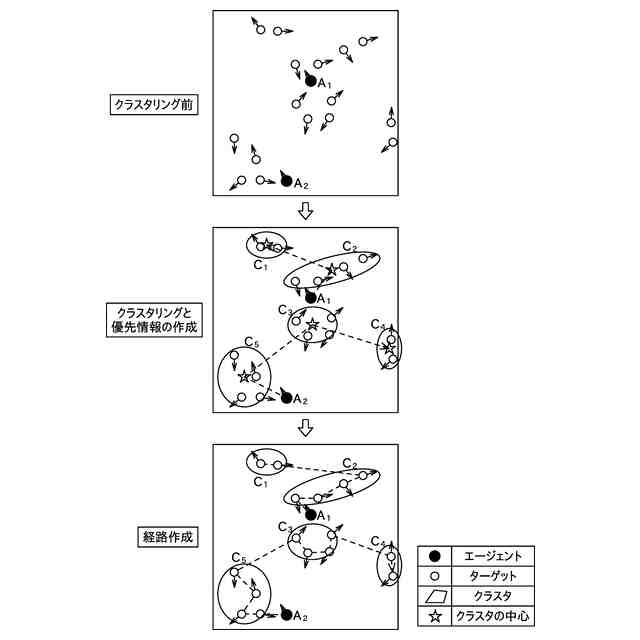
エージェントによるクラスタの訪問順序の優先度が設定される場合の経路作成の流れの概要図。
図7の経路探索で使用される情報を示す図。
センサ1とセンサ2の評価値の分布を示す図。
センサの評価値を用いて候補経路を評価する方法を示す図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
1日前
川崎重工業株式会社
断熱配管
1日前
川崎重工業株式会社
ロボット
8日前
川崎重工業株式会社
ダクト継手
8日前
川崎重工業株式会社
監視システム
2日前
川崎重工業株式会社
塗装システム
1日前
川崎重工業株式会社
配管の支持構造
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ロボットシステム
2日前
川崎重工業株式会社
ワーク搬送ロボット
1日前
川崎重工業株式会社
締結方法及び締結装置
8日前
川崎重工業株式会社
極低温流体用配管設備
3日前
川崎重工業株式会社
ロボットの診断システム
2日前
川崎重工業株式会社
支援システムおよび支援方法
1日前
株式会社キッツ
逆流防止弁
2日前
川崎重工業株式会社
経路作成方法及び経路作成装置
1日前
川崎重工業株式会社
ガス燃料供給システムおよび船舶
8日前
川崎重工業株式会社
アンモニア回収システム及び方法
1日前
川崎重工業株式会社
配管の接続構造および配管システム
4日前
川崎重工業株式会社
ロボットシステム及びその動作方法
3日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
1日前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
ワーク搬送ロボットおよびロボット制御方法
1日前
川崎重工業株式会社
油圧ショベルの油圧システムおよびブーム制御弁
4日前
川崎重工業株式会社
ロボットシステムの制御方法及びロボットシステム
2日前
川崎重工業株式会社
秘密計算システム、秘密計算方法及び秘密計算装置
9日前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
1日前
川崎重工業株式会社
手術支援システム、手術支援方法および情報提供方法
1日前
川崎重工業株式会社
ワーク搬送ロボットおよびワーク搬送ロボットの制御方法
1日前
川崎重工業株式会社
ポート配置決定装置、手術ロボットシステムおよびその制御方法
1日前
川崎重工業株式会社
極低温用圧縮設備、及びそれを備えるボイルオフガス液化システム
3日前
川崎重工業株式会社
手術支援ロボット、手術支援システムおよび手術支援ロボットの制御方法
3日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ