TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025163926
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024067573
出願日
2024-04-18
発明の名称
運転支援方法及び運転支援装置
出願人
日産自動車株式会社
代理人
弁理士法人とこしえ特許事務所
主分類
G08G
1/16 20060101AFI20251023BHJP(信号)
要約
【課題】自車と他車との位置関係やセンサの検知性能にかかわらず、対向車の存在を推定することである。
【解決手段】プロセッサ10は、2台の路側センサ210の間に分岐が存在しない対象区間OLの走行車線L1へ自車V1が進入するときに、車両検知システム200から通信機能を介して走行車線L1に隣接する対向車線L2を走行する車両の第1車両数を取得し、対象区間OLの走行車線L1を走行中に、自車V1の車載センサ2を用いて、自車V1がすれ違った対向車線L2を走行する対向車OVの第2車両数を算出し、第1車両数と第2車両数との差分がゼロである場合には、自車V1の前方に対象区間OLを走行する対向車OVが存在しないと判断し、その判断の結果を外部に出力する。
【選択図】図2
特許請求の範囲
【請求項1】
道路に設置された複数の路側センサを備える車両検知システムと通信可能な運転支援装置のプロセッサに使用される、自車の運転を支援する運転支援方法であって、
車両検知システムは、
2台の前記路側センサの間に分岐が存在しない対象区間を識別し、
前記路側センサにより検知された前記対象区間の各車線に進入した進入車の台数と前記対象区間から退出した退出車の台数とに基づいて、前記対象区間の前記各車線を走行する車両の第1車両数を算出し、
前記運転支援装置のプロセッサは、
前記自車が前記対象区間の走行車線へ進入するときに、前記車両検知システムから前記走行車線に隣接する対向車線を走行する前記車両である対向車の前記第1車両数を取得し、
前記対象区間の前記走行車線を走行中に、前記自車に搭載されたセンサを用いて、前記自車がすれ違った前記対向車の第2車両数を算出し、
前記第1車両数と前記第2車両数との差分を算出し、
前記差分がゼロである場合には、前記自車の前方に前記対象区間を走行する前記対向車が存在しないと判断し、
前記判断の結果を外部に出力する運転支援方法。
続きを表示(約 1,100 文字)
【請求項2】
前記運転支援装置は、前記自車に所定経路を自律的に運転させる車両コントローラを、さらに備え、
前記プロセッサは、
前記センサを用いて前記自車の前方の障害物を検知した場合には、前記車両コントローラを用いて、前記障害物を回避させる前記所定経路を前記自車に運転させ、
前記対象区間に進入した前記自車の前方に前記障害物が検知され、かつ前記自車の前方に前記対象区間を走行する前記対向車が存在しないと判断された場合には、前記障害物を回避する前記所定経路を前記自車に運転させる回避運転の実行を開始させる請求項1に記載の運転支援方法。
【請求項3】
前記プロセッサは、前記対象区間に進入した前記自車の前方に前記障害物が検知された場合であっても、前記自車の前方に前記対象区間を走行する前記対向車が存在すると判断された場合には、前記回避運転の実行を禁止する請求項2に記載の運転支援方法。
【請求項4】
前記プロセッサは、前記自車の前方に前記対象区間を走行する前記対向車が存在しないと判断されてから第1所定時間において、前記対象区間の前記対向車線に進入する他車が前記路側センサにより検知された場合には、前記回避運転の実行を禁止する請求項2に記載の運転支援方法。
【請求項5】
前記第1所定時間は、前記路側センサが前記他車を検知した検知タイミングから前記プロセッサが前記第1車両数を取得するまでの時間に基づいて設定する請求項4に記載の運転支援方法。
【請求項6】
前記プロセッサは、前記第1車両数と前記第2車両数との前記差分が1以上であっても、前記自車が前記対象区間に進入してから第2所定時間の間に、前記自車がすれ違った前記対向車が検知されなかった場合には、前記自車の前方に前記対象区間を走行する前記対向車が存在しないと判断して、前記回避運転を実行させる請求項2に記載の運転支援方法。
【請求項7】
前記第2所定時間は、前記対象区間を走行する前記自車と前方の前記路側センサとの距離が長いほど、長く設定する請求項6に記載の運転支援方法。
【請求項8】
前記第2所定時間は、前記対象区間の前記対向車線の制限車速が高いほど、短く設定する請求項6に記載の運転支援方法。
【請求項9】
前記車両検知システムは、前記対象区間の前記対向車線に進入する前記進入車が基準時間に検知されなかった場合には、前記対象区間に存在する前記第1車両数をゼロと設定する請求項1に記載の運転支援方法。
【請求項10】
前記基準時間は、前記対象区間の距離が長いほど、長く設定する請求項9に記載の運転支援方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転支援方法及び運転支援装置に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
車車間通信を介して他車から送信された検知結果及び検知可能領域情報と、自車の検知可能領域と、走行不可領域とによって囲まれた閉領域が形成されるときに、閉領域および自車及び他車に搭載されている障害物検知手段の検知結果を時系列的に管理することにより、閉領域内の障害物の存在を推定する装置が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特許第4412337号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、自車と他車との位置関係やセンサの検知性能によっては、自車と他車との間に閉領域が構成されず、障害物の存否を判断できない場合がある。
【0005】
本発明が解決しようとする課題は、自車と他車との位置関係やセンサの検知性能にかかわらず、対向車の存否を判断することである。
【課題を解決するための手段】
【0006】
本発明は、2台の路側センサの間に分岐が存在しない対象区間の走行車線に自車が進入するときに、車両検知システムから走行車線に隣接する対向車線を走行する対向車の第1車両数を取得し、自車に搭載されたセンサを用いて、対象区間を走行中に自車がすれ違った対向車の第2車両数を算出し、第1車両数と第2車両数との差分がゼロである場合には、自車の前方に対向車が存在しないと判断することによって上記課題を解決する。
【発明の効果】
【0007】
本発明によれば、自車と他車との位置関係やセンサの検知性能にかかわらず、対向車の存否を判断できる。
【図面の簡単な説明】
【0008】
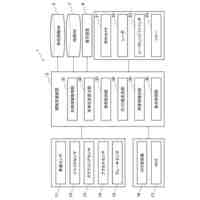
運転支援装置のハードウェア構成の一例を示すブロック図である。
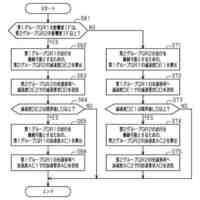
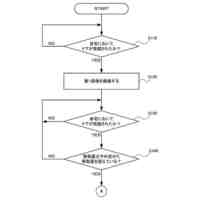
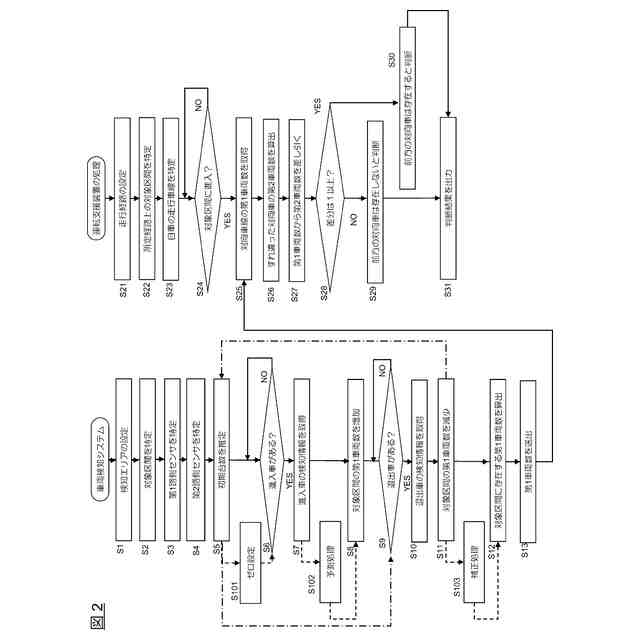
運転支援の処理手順の一例を示す第1のフローチャートである。
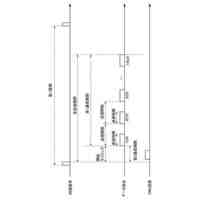
図3(a)(b)(c)は、運転支援の機能を説明するための第1の図である。
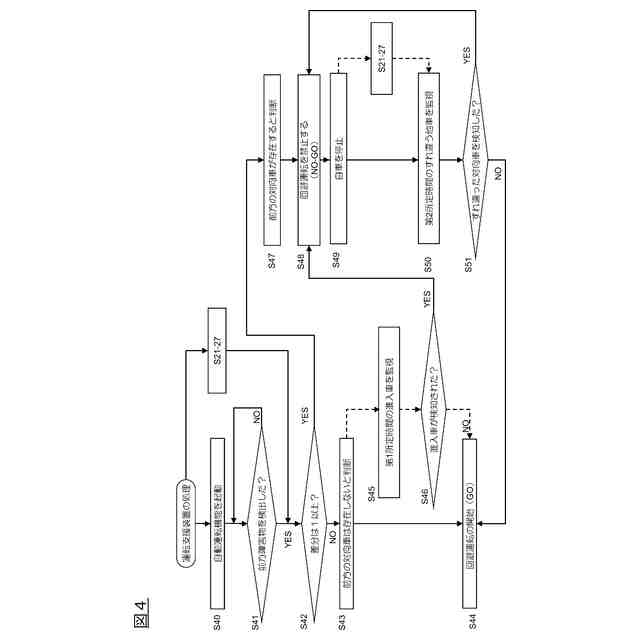
運転支援の処理手順の一例を示す第2のフローチャートである。
図5(a)(b)(c)は、運転支援の機能を説明するための第2の図である。
【発明を実施するための形態】
【0009】
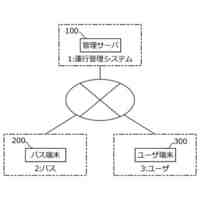
図1は運転支援システム100のハードウェア構成を示す。運転支援システム100の運転支援装置1は、通信装置40を介して車両検知システム200と情報を授受する。
【0010】
まず、道路側のインフラストラクチャーである車両検知システム200について説明する。
車両検知システム200は、道路に設置された複数の路側センサ210と、演算装置220と、地図情報230とを備え、これらは通信システム240を介して情報の授受を行う。通信システム240は車両検知システム200の内部装置及び外部装置との通信を実行する。
各路側センサ210は、センサ機能と、記憶機能(メモリ)と、通信機能とを備える。路側センサ210は、カメラ及び/又はレーダー装置を用いた検知機能を備える。カメラは、CCD等の撮像素子を備えるイメージセンサ、超音波カメラ、赤外線カメラを含む。レーダー装置は、レーザーレーダー、ミリ波レーダー、LiDAR(light detection and ranging)ユニット、超音波レーダーを含む。路側センサ210は、検知領域に進入した車両、二輪車、自転車などの車両を検知する。各路側センサ210は、通信システム240を介して、自己の識別子を付して検知結果を演算装置220に提供する。複数の路側センサ210の検知機能及び検知処理は同期されており、共通の時間軸における各時刻の検知結果が演算装置220に提供される。
地図情報230は、複数の路側センサ210の各位置と、2台の路側センサ210に挟まれた道路の区間の位置及び区間の特徴を備える。区間の特徴は、区間に分岐が存在すること又は存在しないことを含む。分岐を構成する道路は、分岐路、合流路、交差路を含む。地図情報230は、2台の路側センサ210の間に分岐が存在しない区間を「対象区間」として定義する。対象区間は、2台の路側センサ210の設置位置により特定できる。路側センサ210は道路が交差する地点に設けられることが多いので、路側センサ210の位置に最も近い地図情報上のノードの位置により対象区間の位置を特定してもよい。
「対象区間」には、分岐点、合流点、交差点が存在しない。「対象区間」は、進行方向が逆である上り車線と下り車線とが接する道路に設定される。「対象区間」は、片側一車線の道路に設定できる。地図情報230は、対象区間の位置を特定する情報と対象区間であることを識別する識別子とを対応づけて読み出し可能なように記憶する。
演算装置220は、地図情報230を参照し、対象区間を構成する2台の路側センサ210を特定する。特に限定されないが、2台の路側センサ210の一方は対象区間の一方端部に設置された第1路側センサとし、他方は対象区間の他方端部に設置された第2路側センサとする。対象区間は上り方向の車線と下り方向の車線を含む。自車を基準とすると、対象区間は、自車の走行車線と進行方向が反対である対向車線を有する。
演算装置220は、対象区間の一方端に設けられた第1路側センサから取得した第1検知情報に基づいて対象区間の一の車線(例えば対向車線)に進入する進入車の台数を算出し、対象区間の他方端に設けられた第2路側センサから取得した第2検知情報に基づいて対象区間の一の車線(例えば対向車線)から退出する退出車の台数を算出する。もちろん他の車線としての走行車線についても、同様に進入車と退出車の台数を算出できる。演算装置220は、対象区間の一の車線を特定して進入車の台数と退出車の台数を管理する。特に限定されないが、本実施形態では、互いに隣接する上り方向の車線と下り方向の車線とを進入車/退出車の台数管理の対象とする。
演算装置220は、路側センサ210の検知情報及びその検知時刻を取得し、共通の検知時刻における対象区間の一の車線への進入車の台数から一の車線からの退出車の台数を差し引いて、対象区間の各車線を走行する第1車両数を算出する。演算装置220は、対象区間の進入車及び退出車を逐次かつ継続的に監視し、刻々のタイミングにおける対象区間の各車線を走行する第1車両数を算出する。
なお、演算装置220は、通信システム240を介して、第1車両数を外部に送出する。なお、演算装置220は、通信システム240を介した情報授受及び制御が可能であることを前提に、路側センサ210にそれぞれ併設させた分散配置としてもよいし、複数の路側センサ210を集中的に管理する集約配置としてもよい。また、一の車両検知システム200が対象領域の全てを管理できない場合には、車両検知システム200は対象領域を分割した領域ごとに複数設けることができる。分割された領域を管理する複数の車両検知システム200は相互に情報の授受を行い連携する。
通信システム240は、第1車両数が算出されるたびに、狭域通信(DSRC:Dedicated Short Range Communication)を介して外部に第1車両数を出力する。これにより、狭域通信可能エリア内に存在する車両のみに第1車両数を提供することができる。車両側は必要に応じて第1車線数を取得するための通信アプリケーションを備える。また、通信システム240は、無線通信を介して、車両側からのリクエストの受信に応じて、リクエストが発出された時刻における第1車両数を、リクエストを発出した車両の通信アドレスへ向けて送出してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
安全支援装置
1日前
日本無線株式会社
船舶システム
2日前
トヨタ自動車株式会社
サーバ
10日前
オムロン株式会社
センサシステム
9日前
オムロン株式会社
センサシステム
9日前
オムロン株式会社
センサシステム
9日前
トヨタ自動車株式会社
路側装置
13日前
一般財団法人中部電気保安協会
見守りシステム
13日前
能美防災株式会社
防犯システム
2日前
杭特電子股分有限公司
車両温度異常警報システム
2日前
トヨタ自動車株式会社
運転支援装置
13日前
トヨタ自動車株式会社
情報処理装置
7日前
株式会社SUBARU
車両および車両用忘れ物防止システム
7日前
トヨタ自動車株式会社
支援情報提供装置
13日前
株式会社mmガード
通信システム
7日前
個人
情報処理装置、情報処理プログラム、及び情報処理方法
10日前
日産自動車株式会社
相乗り可否判定方法及び装置
10日前
日産自動車株式会社
運転支援方法及び運転支援装置
8日前
AVITA株式会社
情報処理システムおよび情報処理方法
7日前
日本信号株式会社
運行管理システム及び方法
13日前
株式会社SUBARU
運転支援装置
7日前
トヨタ自動車株式会社
情報処理装置及びシステム
13日前
能美防災株式会社
熱感知器用の加熱試験器及び加熱試験方法
8日前
富士電機株式会社
監視システム、監視装置、監視方法、プログラム
2日前
日産自動車株式会社
地図情報生成方法及び地図情報生成装置
2日前
ウェイモ エルエルシー
人工知能を使用して車両内の乗客を検出する
13日前
JR東日本コンサルタンツ株式会社
駐車区画決定装置及び駐車区画決定方法
2日前
大衆酷翼(北京)科技有限公司
駐車スペース自動通知システム
1日前
株式会社テラ・ラボ
システム、処理方法およびプログラム
7日前
個人
集積回路内臓タイヤ及び輸送装置の走行データ収集システム
2日前
日産自動車株式会社
運転支援方法及び運転支援装置
7日前
株式会社日立情報通信エンジニアリング
情報処理装置
2日前
ホーチキ株式会社
防災設備
13日前
トヨタ自動車株式会社
入出庫支援システム
9日前
トヨタ自動車株式会社
車両の衝突判定装置
10日前
ジャパンマリンユナイテッド株式会社
監視システム、および船舶
13日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ