TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025162244
公報種別
公開特許公報(A)
公開日
2025-10-27
出願番号
2024065391
出願日
2024-04-15
発明の名称
相乗り可否判定方法及び装置
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/123 20060101AFI20251020BHJP(信号)
要約
【課題】先に乗車している利用者の違和感を低減することが可能な相乗り可否判定方法及び装置を提供する。
【解決手段】相乗り可能な車両1への相乗り乗車の可否を演算処理装置Dで判定するにあたり、演算処理装置Dは、許容迂回時間で車両1が移動可能な移動可能範囲を算出し、車両1の目的地までの計画ルートに基づいて移動可能範囲内で相乗り許容範囲を設定し、相乗り乗車の位置が相乗り許容範囲内である場合に相乗り乗車可と判定し、車両1が目的地に近づくにつれて計画ルートからの最大乖離距離が小さくなるように相乗り許容範囲を設定する。
【選択図】図6
特許請求の範囲
【請求項1】
相乗り可能な車両への相乗り乗車の可否を演算処理装置で判定する相乗り可否判定方法であって、
許容迂回時間で前記車両が移動可能な範囲を算出する移動可能範囲算出ステップと、
前記車両の目的地までの計画ルートに基づいて前記移動可能範囲内で相乗り許容範囲を設定する相乗り許容範囲設定ステップと、
前記相乗り乗車の位置が前記相乗り許容範囲内である場合に相乗り乗車可と判定する相乗り乗車判定ステップと、を備え、
前記相乗り許容範囲は、前記車両が目的地に近づくにつれて前記計画ルートからの最大乖離距離が小さく設定されることを特徴とする相乗り可否判定方法。
続きを表示(約 800 文字)
【請求項2】
前記相乗り許容範囲は、前記計画ルートからの最大乖離距離が前記車両の目的地までの距離以下に設定されることを特徴とする請求項1に記載の相乗り可否判定方法。
【請求項3】
前記相乗り許容範囲は、前記計画ルートからの最大乖離距離が前記車両の目的地までの距離の減少に応じて一様に減少設定されることを特徴とする請求項2に記載の相乗り可否判定方法。
【請求項4】
前記相乗り乗車判定ステップは、前記相乗り乗車の位置と前記計画ルートとの垂直距離が前記計画ルートからの最大乖離距離以下である場合に相乗り乗車可と判定することを特徴とする請求項3に記載の相乗り可否判定方法。
【請求項5】
前記相乗り乗車判定ステップは、前記相乗り乗車の位置が前記計画ルートの進行方向と逆向きである場合に相乗り乗車否と判定することを特徴とする請求項1に記載の相乗り可否判定方法。
【請求項6】
前記相乗り乗車判定ステップは、前記相乗り乗車の位置が前記計画ルートにおける目的地の先方である場合に相乗り乗車否と判定することを特徴とする請求項1に記載の相乗り可否判定方法。
【請求項7】
相乗り可能な車両への相乗り乗車の可否を演算処理装置で判定する相乗り可否判定装置であって、
許容迂回時間で前記車両が移動可能な範囲を算出する移動可能範囲算出手段と、
前記車両の目的地までの計画ルートに基づいて前記移動可能範囲内で相乗り許容範囲を設定する相乗り許容範囲設定手段と、
前記相乗り乗車の位置が前記相乗り許容範囲内である場合に相乗り乗車可と判定する相乗り乗車判定手段と、を備え、
前記相乗り許容範囲は、前記車両が目的地に近づくにつれて前記計画ルートからの最大乖離距離が小さく設定されることを特徴とする相乗り可否判定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、相乗り可否判定方法及び装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
下記特許文献1では、相乗り乗車が要求された場合、目的地到着時刻以前に先に乗車している利用者が目的地に到着できるか否かに応じて相乗り乗車の可否判定が行われる。
【先行技術文献】
【特許文献】
【0003】
特開2021-9514号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1による相乗り乗車の可否判定では、先の乗車している利用者は目的地到着時刻以前に到着できるものの、目的地に対して車両が大きく遠回りすることもあり得、そのような場合には、先に乗車している利用者は違和感を覚えるおそれがある。
本発明は、先に乗車している利用者の違和感を低減することが可能な相乗り可否判定方法及び装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の一態様は、相乗り可能な車両への相乗り乗車の可否を演算処理装置で判定する場合に、演算処理装置は、許容迂回時間で車両が移動可能な範囲を算出し、車両の目的地までの計画ルートに基づいて移動可能範囲内で相乗り許容範囲を設定し、相乗り乗車の位置が相乗り許容範囲内である場合に相乗り乗車可と判定し、相乗り許容範囲は、車両の目的地に近づくにつれて計画ルートからの最大乖離距離が小さく設定されることを要旨とする。
【発明の効果】
【0006】
本発明の一態様によれば、相乗り許容範囲で規定される相乗り乗車位置は、車両が目的地に近づくほど小さく規制されることから、目的地、すなわち計画ルートに対して大きく遠回りすることが規制され、利用者の違和感を低減することができる。
【図面の簡単な説明】
【0007】
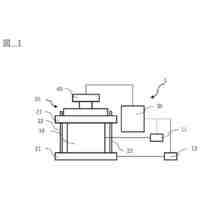
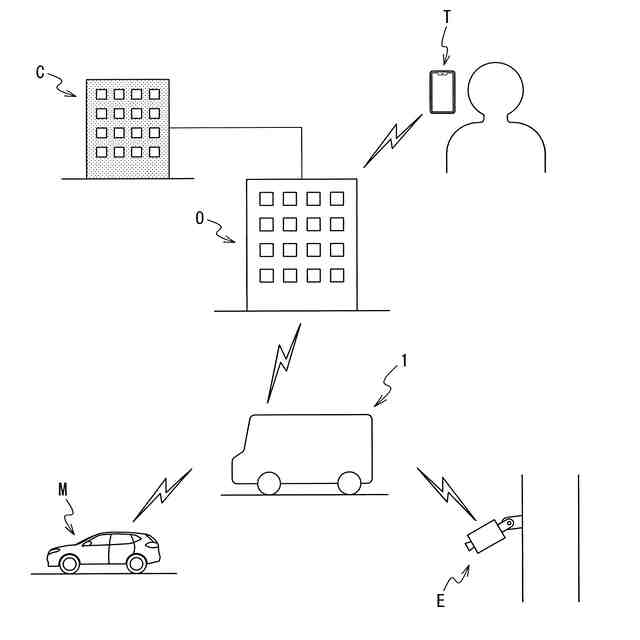
本発明における自動運転車両の運行管理システムの概略構成を示す全体図である。
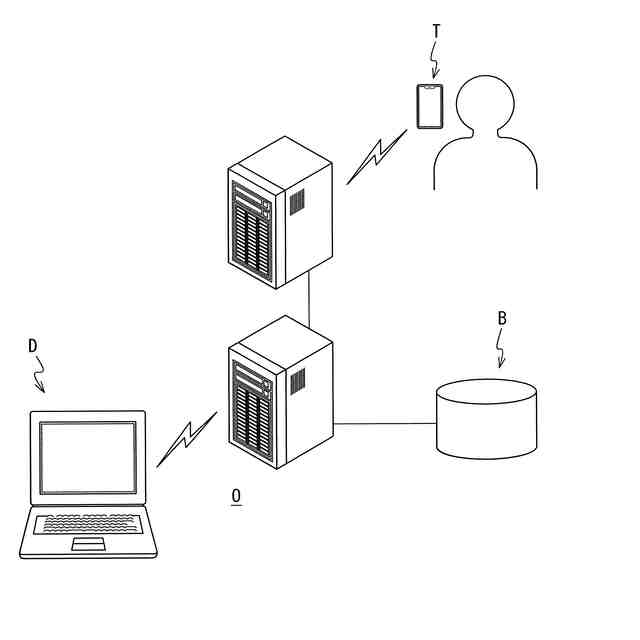
図1における運営事業所と自動運転車両の乗員となるユーザの通信システムの概略構成図である。
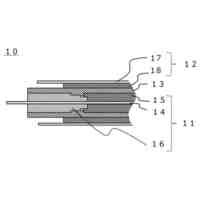
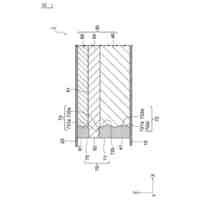
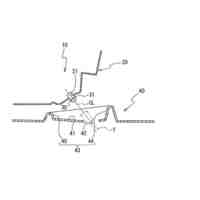
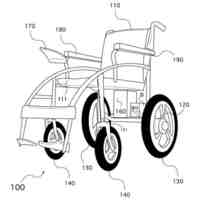
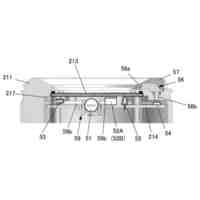
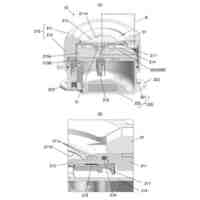
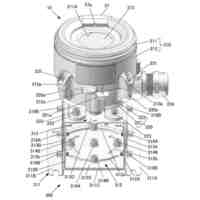
図1の自動運転車両の概略構成図である。
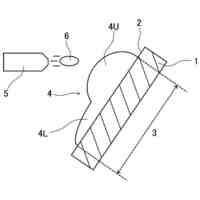
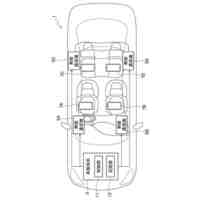
図3の自動運転車両の座席を示す平面図である。
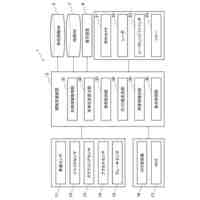
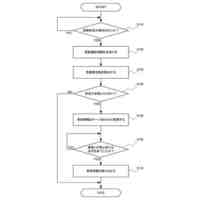
図2の演算処理装置で実行される演算処理のフローチャートである。
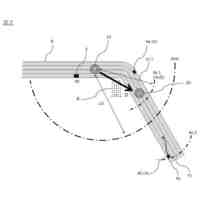
図5の演算処理における移動可能範囲及び相乗り許容範囲の説明図である。
計画ルートに対して設定される相乗り許容範囲の一例の説明図である。
相乗り許容範囲の異なる例の説明図である。
相乗り許容範囲の更に異なる例の説明図である。
相乗り許容範囲の他の例の説明図である。
【発明を実施するための形態】
【0008】
以下、本発明の実施形態について、図面を参照しつつ説明する。なお、各図面は模式的なものであって、現実のものとは異なる場合がある。図1に示す運行管理システムでは、自動運転車両(以下、単に車両とも呼ぶ)1を特定の運営事業所Oが運営管理することを前提としており、車両1は、規定された経路を規定された(凡その)日時に自動運転で運行される。自動運転は、原則として、運転者が不在である。この車両1の運行管理の概要について説明する。この運行管理では、一般的な予約乗車運行の例として、乗車を希望する利用者(ユーザ)が運営事業所Oに、希望する経路と日時などを連絡する。経路は、出発地(乗車地)と目的地が規定され、必要に応じて経由地が規定される。この車両1は、相乗り乗車が許容されており、例えば、利用者が乗車して走行している状態で、他の利用者から相乗りを含む乗車予約が受け付けされた場合には、後段に詳述する相乗り可否判定を行って相乗り乗車の可否を判定し、相乗り乗車可の場合には、車両1を相乗り乗車位置に迂回配車して相乗り乗車を実施する。
【0009】
これを実現するため、利用者は、例えば、スマートフォンやパーソナルコンピュータ(以下、PCとも呼ぶ)などの端末Tから運営事業所Oに連絡することができる(実際の通信には通信事業所が介在する)。また、運営事業所Oは車両1と通信を行うことができる。また、運営事業所Oは他の事業所Cと通信を行うことができる。また、車両1は、路側機などのインフラ設備Eと路車間通信を行うことができ、他の車両Mと車車間通信を行うこともできる。路車間通信や車車間通信では、信号情報や規制情報、渋滞や混雑などの道路情報を授受することができ、例えば、自車両1にとっての死角に存在する物体の情報なども取得することができる。運営事業所Oと車両1の通信も、路車間通信の一部に含まれる。
【0010】
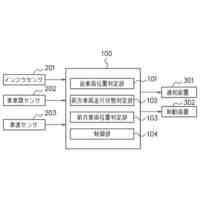
図2は、乗員となる利用者の端末Tと運営事業所O内のPCなどの端末Dの間の通信システムの概略を示すものであるが、運営事業所O内の端末Dは、運営事業所O内のデータベースBや他の事業所Cが管理するデータベースBとも通信を行うことができ、このデータベースBに、利用者の種々の情報が記憶されている。この実施形態は、乗車予約した利用者(の乗車地)に車両1を配車して目的地まで送ることを目的とするが、前述のように、他の利用者から相乗り乗車の予約(受け付け)があり且つ相乗り乗車可の場合には、その利用者の乗車位置に車両1を迂回配車することを目的とする。この目的のために、運営事業所Oでは、利用者から乗車予約を依頼された際に、利用者の乗車地と目的地、乗車予定時刻(日時)などを取得する。また、乗車予約の際、許容迂回係数又は許容迂回時間を取得してもよい。利用者は、この運営事業所Oの車両運営形態が相乗り乗車可能であることを承知して乗車予約するので、乗車の際、他の利用者の相乗り乗車を許容するか否か、また許容する場合の許容迂回係数或いは許容迂回時間を取得することが容認される。例えば乗車地から目的地までの所要時間が30分であり、相乗り迂回のために、その1.5倍の時間を許容するとした場合、その「1.5」が許容迂回係数であり、30分を1.5倍した45分が「許容迂回時間」とされる。この許容迂回係数や許容迂回時間は、言い換えれば、乗員である利用者がどの程度待てるかの指標であり、例えば町の特性などにも依存する。なお、端末Dはパーソナルコンピュータなどのコンピュータシステム(演算処理装置)であり、演算処理を行うプロセッサやプログラムやデータを記憶する記憶装置を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日産自動車株式会社
電動車両
1日前
日産自動車株式会社
保持機構
13日前
日産自動車株式会社
二次電池
12日前
日産自動車株式会社
二次電池
9日前
日産自動車株式会社
電池モジュール
6日前
日産自動車株式会社
リチウム二次電池
12日前
日産自動車株式会社
塗装方法及び自動車
今日
日産自動車株式会社
エンジンのアンダカバー
6日前
株式会社ニフコ
締結構造
6日前
日産自動車株式会社
車両用荷室における排熱構造
9日前
日産自動車株式会社
相乗り可否判定方法及び装置
9日前
日産自動車株式会社
施錠制御方法及び施錠制御装置
8日前
日産自動車株式会社
車載機能制御方法及び車載端末
14日前
日産自動車株式会社
運転支援方法及び運転支援装置
7日前
日産自動車株式会社
運転支援方法及び運転支援装置
6日前
日産自動車株式会社
車両制御方法および車両制御装置
7日前
日産自動車株式会社
車両制御方法および車両制御装置
7日前
日産自動車株式会社
車両制御方法および車両制御装置
7日前
日産自動車株式会社
車体姿勢制御方法及び車体姿勢制御装置
7日前
日産自動車株式会社
地図情報生成方法及び地図情報生成装置
1日前
日産自動車株式会社
成形のための位置決め治具および位置決め方法
1日前
日産自動車株式会社
車両用内燃機関のトルクダウン制御方法および装置
9日前
日産自動車株式会社
表示制御方法及び表示制御装置
8日前
日産自動車株式会社
車両用インフラ設備制御方法、車両用インフラ設備制御装置及び車両用インフラシステム
6日前
日産自動車株式会社
車両用インフラ設備制御方法、車両用インフラ設備制御装置及び車両用インフラシステム
6日前
個人
安全支援装置
今日
日本精機株式会社
警報システム
2か月前
個人
自動電動車椅子
1か月前
株式会社SUBARU
車両
27日前
エムケー精工株式会社
車両誘導装置
2か月前
スズキ株式会社
運転支援装置
2か月前
ニッタン株式会社
検知器
1か月前
ニッタン株式会社
検知器
1か月前
ニッタン株式会社
検知器
1か月前
日本無線株式会社
船舶システム
1日前
ニッタン株式会社
検知器
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ