TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025165222
公報種別
公開特許公報(A)
公開日
2025-11-04
出願番号
2024069195
出願日
2024-04-22
発明の名称
画像処理装置
出願人
キヤノン株式会社
代理人
個人
主分類
H04N
23/745 20230101AFI20251027BHJP(電気通信技術)
要約
【課題】フリッカ領域の形状を高精度で算出できるようにする。
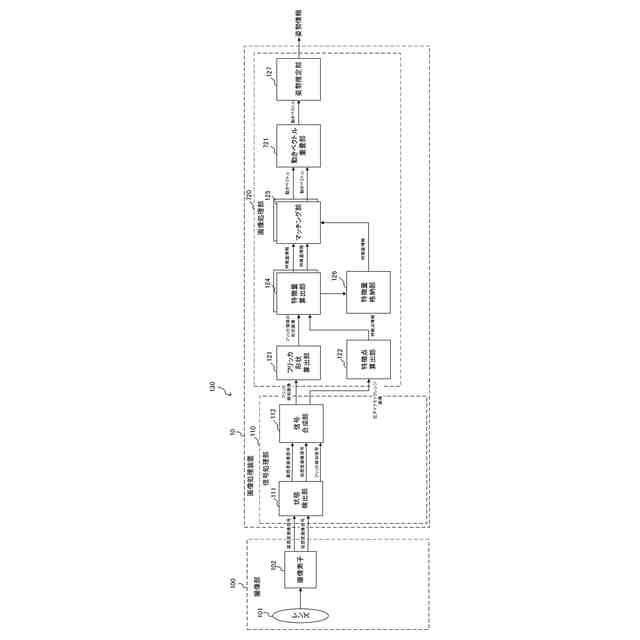
【解決手段】画像処理装置は、第1の露光時間で撮像された第1の画像信号と、前記第1の露光時間とは異なる第2の露光時間で撮像された第2の画像信号とを基に、画素毎のフリッカ検知信号を検出する第1の状態検出部111と、前記第1の状態検出部により検出された前記フリッカ検知信号を基に、フリッカ領域の形状を算出する第1のフリッカ形状算出部121とを有する。
【選択図】図1
特許請求の範囲
【請求項1】
第1の露光時間で撮像された第1の画像信号と、前記第1の露光時間とは異なる第2の露光時間で撮像された第2の画像信号とを基に、画素毎のフリッカ検知信号を検出する第1の状態検出部と、
前記第1の状態検出部により検出された前記フリッカ検知信号を基に、フリッカ領域の形状を算出する第1のフリッカ形状算出部と
を有することを特徴とする画像処理装置。
続きを表示(約 2,000 文字)
【請求項2】
前記第1の露光時間は、フリッカの周波数より長い露光時間であり、
前記第2の露光時間は、フリッカの周波数より短い露光時間であることを特徴とする請求項1に記載の画像処理装置。
【請求項3】
フレーム毎に、前記第1のフリッカ形状算出部により算出されたフリッカ領域の形状の特徴点を基に、特徴量を算出する第1の特徴量算出部と、
前記第1の特徴量算出部により算出された現在のフレームの特徴量と前フレームの特徴量を基に、特徴点マッチングを行い、動きベクトルを算出する第1のマッチング部とをさらに有することを特徴とする請求項1に記載の画像処理装置。
【請求項4】
フレーム毎に、前記第1の画像信号と前記第2の画像信号を合成することにより第3の画像信号を生成する第1の信号合成部と、
フレーム毎に、前記第3の画像信号の特徴点を算出する特徴点算出部と、
フレーム毎に、前記第3の画像信号の特徴点と、前記フリッカ領域の形状の特徴点とを重畳する特徴点重畳部とをさらに有し、
前記第1の特徴量算出部は、フレーム毎に、前記特徴点重畳部により重畳された特徴点の特徴量を算出し、
前記第1のマッチング部は、前記第1の特徴量算出部により算出された現在のフレームの特徴量と前フレームの特徴量を基に、特徴点マッチングを行い、動きベクトルを算出することを特徴とする請求項3に記載の画像処理装置。
【請求項5】
前記第1のマッチング部により算出された動きベクトルを基に、前記第1の画像信号と前記第2の画像信号を生成した撮像部の姿勢を推定する姿勢推定部をさらに有することを特徴とする請求項3に記載の画像処理装置。
【請求項6】
フレーム毎に、前記第1の画像信号と前記第2の画像信号を合成することにより第3の画像信号を生成する第1の信号合成部と、
フレーム毎に、前記第3の画像信号の特徴点を算出する特徴点算出部と、
フレーム毎に、前記特徴点算出部により算出された前記第3の画像信号の特徴点の特徴量を算出する第2の特徴量算出部と、
前記第2の特徴量算出部により算出された現在のフレームの特徴量と前フレームの特徴量を基に、特徴点マッチングを行い、動きベクトルを算出する第2のマッチング部とをさらに有することを特徴とする請求項3に記載の画像処理装置。
【請求項7】
フレーム毎に、前記第1のマッチング部により算出された動きベクトルと、前記第2のマッチング部により算出された動きベクトルとを重畳する動きベクトル重畳部と、
前記動きベクトル重畳部により重畳された動きベクトルを基に、前記第1の画像信号と前記第2の画像信号を生成した撮像部の姿勢を推定する姿勢推定部とをさらに有することを特徴とする請求項6に記載の画像処理装置。
【請求項8】
フレーム毎に、前記第2のマッチング部により算出された動きベクトルの中で、前記第1のマッチング部により算出された動きベクトルに基づく判定値に対して、閾値以上異なる動きベクトルを除去した動きベクトルを出力する動きベクトル除去部と、
前記動きベクトル除去部により出力された動きベクトルを基に、前記第1の画像信号と前記第2の画像信号を生成した撮像部の姿勢を推定する姿勢推定部とをさらに有することを特徴とする請求項6に記載の画像処理装置。
【請求項9】
前記判定値は、前記第1のマッチング部により算出された動きベクトルの平均値であることを特徴とする請求項8に記載の画像処理装置。
【請求項10】
前記第1の画像信号と前記第2の画像信号は、第1の撮像素子により撮像された画像信号であり、
第2の撮像素子により前記第1の露光時間で撮像された第4の画像信号と、前記第2の撮像素子により前記第2の露光時間で撮像された第5の画像信号とを基に、画素毎のフリッカ検知信号を検出する第2の状態検出部と、
前記第2の状態検出部により検出された前記フリッカ検知信号を基に、フリッカ領域の形状を算出する第2のフリッカ形状算出部と、
フレーム毎に、前記第1のフリッカ形状算出部により算出されたフリッカ領域の形状の特徴点を基に、特徴量を算出する第1の特徴量算出部と、
フレーム毎に、前記第2のフリッカ形状算出部により算出されたフリッカ領域の形状の特徴点を基に、特徴量を算出する第2の特徴量算出部と、
前記第1の特徴量算出部により算出された特徴量と前記第2の特徴量算出部により算出された特徴量を基に、マッチングを行い、位置関係を示すベクトルを算出するマッチング部とをさらに有することを特徴とする請求項1に記載の画像処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、画像処理装置、画像処理システム、画像処理装置の処理方法及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
車両や産業用ロボットに搭載されるデジタルカメラにおいて、輝度差が非常に大きい条件においても正しい環境認識のために、広ダイナミックレンジ画像を生成する機能(以下、HDR(High Dynamic Range)機能と呼称)が求められている。広ダイナミックレンジ画像を得るために、複数の信号レベルで画像を取得する。近年、HDR機能を持つ撮像素子が、信号機などのLEDによるフリッカにより撮像できない場合がある。
【0003】
特許文献1には、フリッカを検知し除去する機能を持つ撮像素子が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-180459号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された方法の場合は、フリッカの発生している画素領域の形状を取得することができない。フリッカの発生している画素領域の形状を取得することで、形状情報を用いた特徴点マッチングによる姿勢推定に用いることができる。一般的に形状の抽出には、Canny法が用いられるが、形状ととらえる画素値の勾配の閾値の設定が一意に決まらないため、精度が低くなる課題がある。
【0006】
本開示の目的は、フリッカ領域の形状を高精度で算出できるようにすることである。
【課題を解決するための手段】
【0007】
画像処理装置は、第1の露光時間で撮像された第1の画像信号と、前記第1の露光時間とは異なる第2の露光時間で撮像された第2の画像信号とを基に、画素毎のフリッカ検知信号を検出する第1の状態検出部と、前記第1の状態検出部により検出された前記フリッカ検知信号を基に、フリッカ領域の形状を算出する第1のフリッカ形状算出部とを有する。
【発明の効果】
【0008】
本開示によれば、フリッカ領域の形状を高精度で算出することができる。
【図面の簡単な説明】
【0009】
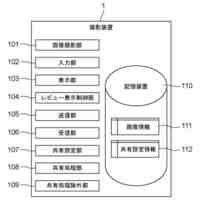
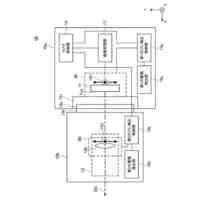
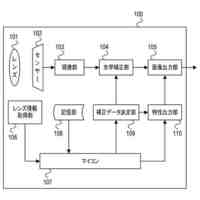
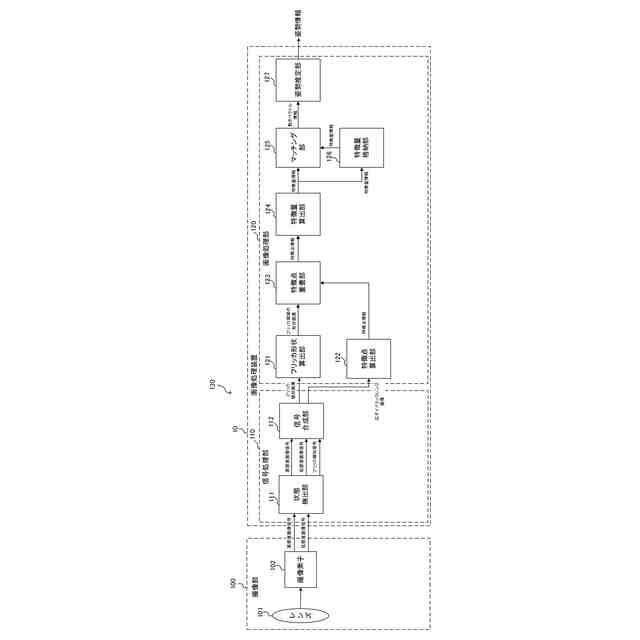
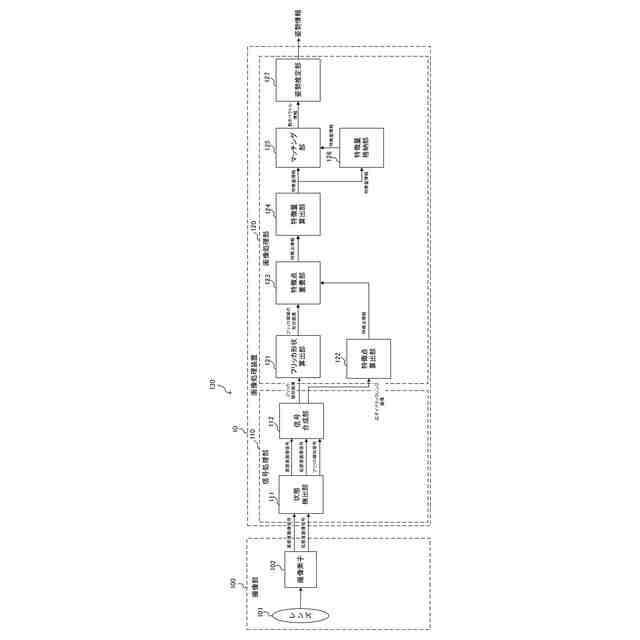
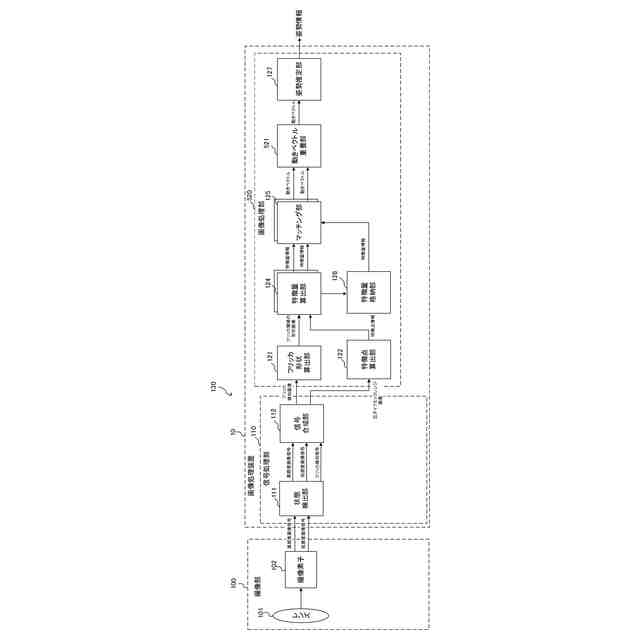
画像処理システムの構成例を示すブロック図である。
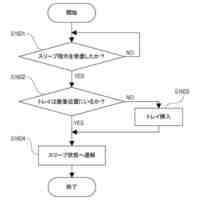
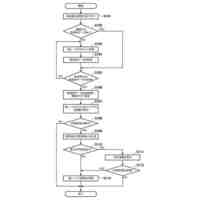
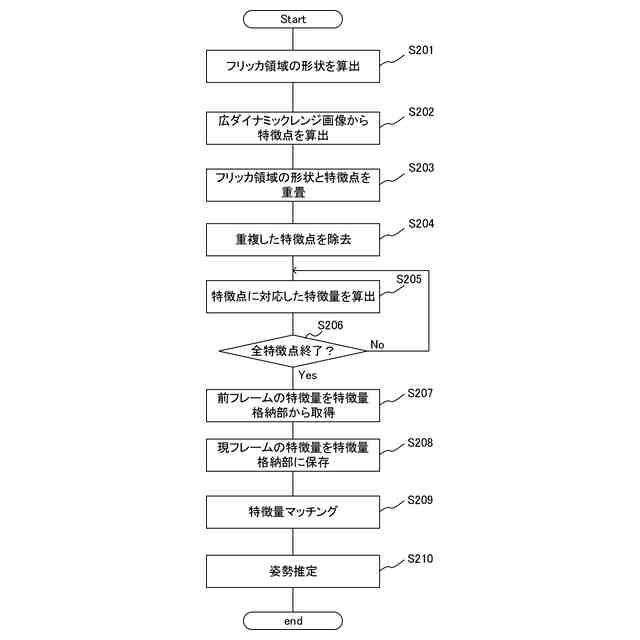
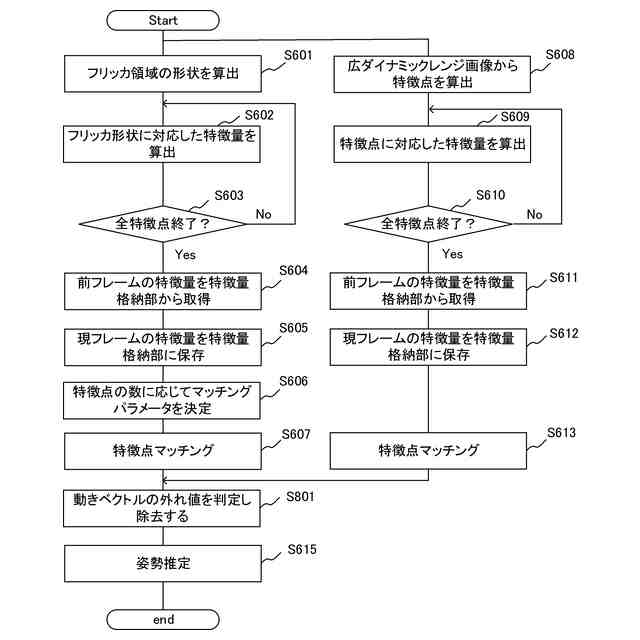
画像処理部の動作例を示すフローチャートである。
フリッカ形状算出部の動作例を示すフローチャートである。
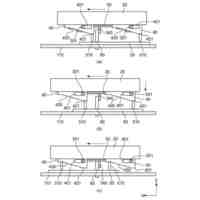
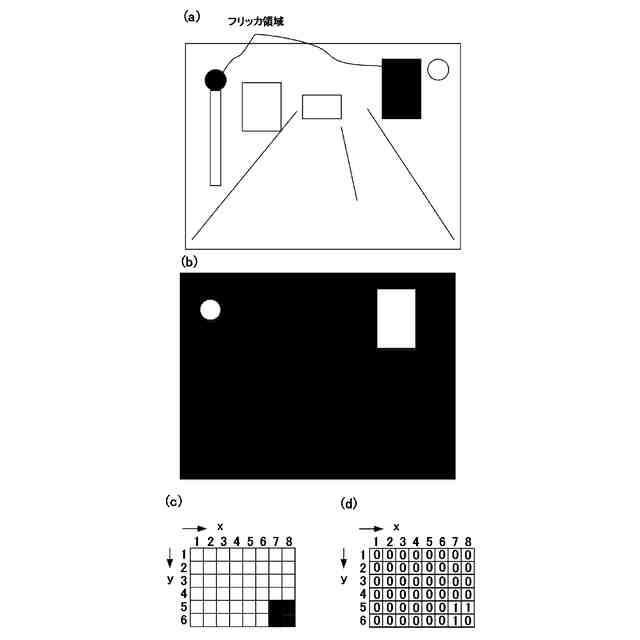
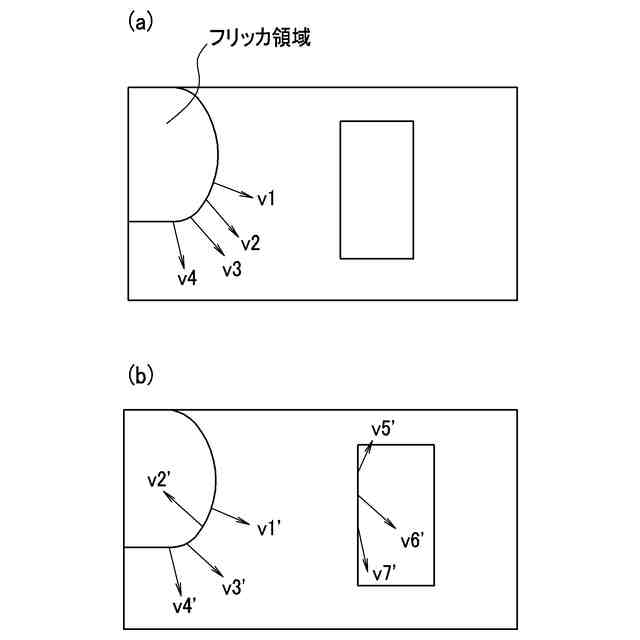
フリッカ領域の形状画像の算出方法を示す図である。
画像処理システムの構成例を示すブロック図である。
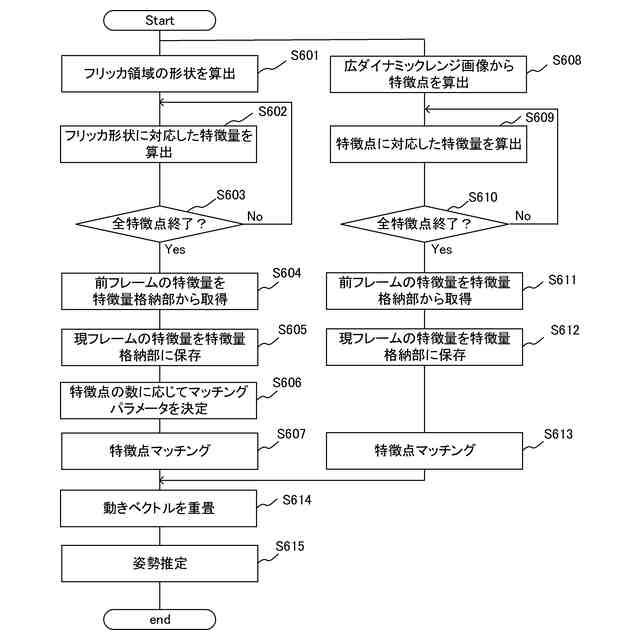
画像処理部の動作例を示すフローチャートである。
画像処理システムの構成例を示すブロック図である。
画像処理部の動作例を示すフローチャートである。
画像処理部の動きベクトル除去方法を示す図である。
画像処理システムの構成例を示すブロック図である。
画像処理部の動作例を示すフローチャートである。
画像処理システムの構成例を示すブロック図である。
画像処理部の動作例を示すフローチャートである。
【発明を実施するための形態】
【0010】
(第1の実施形態)
図1は、第1の実施形態に係る画像処理システム130の構成例を示すブロック図である。以下、図面を用いて、第1の実施形態の画像処理システム130について詳細に説明する。画像処理システム130は、撮像部100の姿勢推定を行うために、画素毎にフリッカを検知することでフリッカ形状を算出し、画像信号を用いて算出した特徴点とフリッカ形状画像を重畳して特徴量を算出する。画像処理システム130は、算出した特徴量を用いて、特徴点マッチングを行うことで、撮像部100の姿勢推定する場合における例を説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
容器
6日前
キヤノン株式会社
容器
12日前
キヤノン株式会社
トナー
15日前
キヤノン株式会社
記録装置
26日前
キヤノン株式会社
測距装置
今日
キヤノン株式会社
撮影装置
26日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
現像容器
26日前
キヤノン株式会社
表示装置
6日前
キヤノン株式会社
現像容器
26日前
キヤノン株式会社
定着装置
27日前
キヤノン株式会社
現像装置
26日前
キヤノン株式会社
現像装置
26日前
キヤノン株式会社
記録装置
12日前
キヤノン株式会社
測距装置
21日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
現像装置
19日前
キヤノン株式会社
液体収容体
1日前
キヤノン株式会社
液体収容体
今日
キヤノン株式会社
情報処理装置
26日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
カートリッジ
26日前
キヤノン株式会社
画像処理装置
26日前
キヤノン株式会社
電子写真装置
13日前
キヤノン株式会社
画像形成装置
26日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
画像形成装置
26日前
キヤノン株式会社
画像形成装置
26日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
26日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
画像形成装置
9日前
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
情報処理装置
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ