TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025165921
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2025096444,2023126531
出願日
2025-06-10,2023-08-02
発明の名称
光検出および測距(LiDAR)装置ならびにカメラにおける欠陥検出のための時間的に変調された光の放射
出願人
ウェイモ エルエルシー
代理人
個人
,
個人
主分類
G01S
7/497 20060101AFI20251028BHJP(測定;試験)
要約
【課題】光検出および測距(LiDAR)装置ならびにカメラにおける時間的に変調された光の放射および欠陥検出に関する。
【解決手段】例示的な実施形態は、方法を含む。方法は、光学構成要素を用いて第一の検出器によって、周囲環境に対応するバックグラウンド信号を検出することを含む。方法はまた、第一の光源によって、第一の光信号で光学構成要素の第一の部分を照明することを含む。さらに、方法は、光学構成要素の第一の部分の本体内または光学構成要素の第一の部分の表面上に一つまたは複数の欠陥が存在する場合、第一の検出器によって第一の光信号を検出することを含む。さらに、方法は、光学構成要素の第一の部分の本体内または光学構成要素の第一の部分の表面上に一つまたは複数の欠陥が存在する場合、コンピューティングデバイスによって判断することを含む。
【選択図】図12
特許請求の範囲
【請求項1】
光学構成要素を用いて第一の検出器によって、周囲環境に対応するバックグラウンド信号を検出することと、
第一の光源によって、第一の変調周波数に従って変調される第一の光信号で前記光学構成要素の第一の部分を照明することであって、センシング装置は、前記光学構成要素を用いて前記周囲環境内の物体を検出するように構成されることと、
前記光学構成要素の前記第一の部分の本体内または前記光学構成要素の前記第一の部分の表面上に一つまたは複数の欠陥が存在する場合、前記第一の検出器によって前記第一の光信号を検出することと、
前記光学構成要素の前記第一の部分の前記本体内または前記光学構成要素の前記第一の部分の前記表面上に一つまたは複数の欠陥が存在する場合、前記検出されたバックグラウンド信号および前記検出された第一の光信号に基づいて、コンピューティングデバイスによって判断することであって、前記光学構成要素の前記第一の部分の前記本体内または前記光学構成要素の前記第一の部分の前記表面上に一つまたは複数の欠陥が存在する場合、前記検出されたバックグラウンド信号および前記検出された第一の光信号に基づいて判断することは、前記第一の変調周波数に基づいて、前記検出されたバックグラウンド信号と前記検出された第一の光信号とを明確にすることを含むことと、を含む方法。
続きを表示(約 1,800 文字)
【請求項2】
前記第一の光信号は第一の波長範囲内にあり、一つまたは複数の欠陥が存在する場合、判断することは、前記第一の波長範囲に基づいて、前記検出されたバックグラウンド信号と前記検出された第一の光信号とを明確にすることをさらに含む、請求項1に記載の方法。
【請求項3】
第二の光源によって、第二の変調周波数に従って変調された第二の光信号で前記光学構成要素の第二の部分を照明することであって、前記第二の変調周波数は前記第一の変調周波数とは異なり、前記第二の光信号は第二の波長範囲内にあり、前記第二の波長範囲は前記第一の波長範囲と重ならないことと、
前記光学構成要素の前記第二の部分の本体内または前記光学構成要素の前記第二の部分の表面上に一つまたは複数の欠陥が存在する場合、第二の光検出器によって前記第二の光信号を検出することと、
前記光学構成要素の前記第二の部分の前記本体内または前記光学構成要素の前記第二の部分の前記表面上に一つまたは複数の欠陥が存在する場合、前記検出されたバックグラウンド信号および前記検出された第二の光信号に基づいて、コンピューティングデバイスによって判断することであって、前記光学構成要素の前記第二の部分の前記本体内または前記光学構成要素の前記第二の部分の前記表面上に一つまたは複数の欠陥が存在する場合、前記検出されたバックグラウンド信号および前記検出された第二の光信号に基づいて判断することは、前記第二の変調周波数および前記第二の波長範囲に基づいて、前記検出されたバックグラウンド信号と前記検出された第二の光信号とを明確にすることを含むことと、を含む、請求項2に記載の方法。
【請求項4】
前記第一の波長範囲が第一の種類の欠陥に対応し、前記第二の波長範囲が第二の種類の欠陥に対応する、請求項3に記載の方法。
【請求項5】
前記光学構成要素の前記第一の部分と前記光学構成要素の前記第二の部分が少なくとも部分的に重なり合う、請求項3に記載の方法。
【請求項6】
前記周囲環境に対応する前記バックグラウンド信号が、前記第一の波長範囲内の光を含まない、請求項2に記載の方法。
【請求項7】
前記光学構成要素の前記第一の部分が、前記光学構成要素の全体を占めない、請求項1に記載の方法。
【請求項8】
第二の変調周波数に従って変調された第二の光信号で前記光学構成要素の第二の部分を、第二の光源によって照明することであって、前記第二の変調周波数は前記第一の変調周波数とは異なり、前記光学構成要素の前記第二の部分は、前記光学構成要素の前記第一の部分と重なり合わないことと、
前記光学構成要素の前記第二の部分の本体内または前記光学構成要素の前記第二の部分の表面上に一つまたは複数の欠陥が存在する場合、第二の光検出器によって前記第二の光信号を検出することと、
前記光学構成要素の前記第二の部分の前記本体内または前記光学構成要素の前記第二の部分の前記表面上に一つまたは複数の欠陥が存在する場合、前記検出されたバックグラウンド信号および前記検出された第二の光信号に基づいて、前記コンピューティングデバイスによって判断することであって、前記光学構成要素の前記第二の部分の前記本体内または前記光学構成要素の前記第二の部分の前記表面上に一つまたは複数の欠陥が存在する場合、前記検出されたバックグラウンド信号および前記検出された第二の光信号に基づいて判断することは、前記第二の変調周波数に基づいて、前記検出されたバックグラウンド信号と前記検出された第二の光信号とを明確にすることを含むことと、をさらに含む、請求項7に記載の方法。
【請求項9】
前記光学構成要素の前記第一の部分および前記光学構成要素の前記第二の部分は、前記光学構成要素全体にわたって縞模様または市松模様のうちの少なくとも一部を形成する、請求項8に記載の方法。
【請求項10】
前記光学構成要素の前記第一の部分を前記第一の光信号で照明することは、
前記第一の光信号を前記光学構成要素の前記第一の部分の前記本体内に結合することと、
全反射を使用して前記光学構成要素の前記第一の部分の前記本体を通して前記第一の光信号を伝播させることと、を含む、請求項1に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【背景技術】
【0001】
本明細書に別段の記載がない限り、この章の説明は、本出願の特許請求の範囲の先行技術ではなく、この章に含めることにより先行技術であると認められるべきではない。
続きを表示(約 2,800 文字)
【0002】
光検出および測距(LiDAR)装置は、周囲環境に光パルスを発して、各光パルスのそれぞれの飛行時間を決定することによって、周囲環境内の物体までの距離を推定することができる。各光パルスの飛行時間を使用して、周囲環境内の反射物体までの距離を推定する、および/または周囲環境内の反射物体を示す三次元点群を作り出すことができる。さらに、カメラを使用して、周囲環境内の一つまたは複数の物体の画像を取り込むことができる。このような画像は、物体検出および回避方法(例えば、自動または半自動モードで動作する車両内)で使用されることができる。しかし、LiDAR装置および/またはカメラの一つまたは複数の光路に沿った欠陥は、誤った検出(例えば、誤った点群、またはぼやけたおよび/もしくは不明瞭な画像)につながる可能性がある。
【発明の概要】
【0003】
本明細書に記載の例示的な実施形態は、LiDAR装置またはカメラの光学構成要素上またはそこの一つまたは複数の欠陥の存在を検出するために使用される検出器を含む。例えば、LiDAR装置またはカメラには、周囲環境の検出に使用されるレンズおよび/または光学窓が含まれる場合がある。レンズおよび/または光学窓には、時々一つまたは複数の欠陥(例えば、内部亀裂、外側のごみ、または外側の水滴)が発生する場合がある。欠陥を検出するために、本明細書に記載の実施形態は、光源を使用して光学窓の一部または全体を照明することを含むことができる。光源からの照明には、構造化照明または波長固有の照明が含まれてもよい。さらに、照明は時間の経過とともに(例えば、変調周波数に基づいて)変化する場合がある。照明の特性を使用して、(例えば、周囲環境の所望の検出に対応する)バックグラウンド信号と欠陥に対応する信号とを明確にすることができる。欠陥を特定すると、一つまたは複数の修復作業(例えば、光学構成要素の洗浄、光学構成要素の交換、または後処理での欠陥の影響の排除)が実行されることができる。
【0004】
第一の態様では、方法が提供される。方法は、光学構成要素を用いて第一の検出器によって、周囲環境に対応するバックグラウンド信号を検出することを含む。方法はまた、第一の光源によって、第一の変調周波数に従って変調された第一の光信号で光学構成要素の第一の部分を照明することを含む。センシング装置は、光学構成要素を用いて周囲環境内の物体を検出するように構成される。さらに、方法は、光学構成要素の第一の部分の本体内または光学構成要素の第一の部分の表面上に一つまたは複数の欠陥が存在する場合、第一の検出器によって第一の光信号を検出することを含む。さらに、方法は、光学構成要素の第一の部分の本体内または光学構成要素の第一の部分の表面上に一つまたは複数の欠陥が存在する場合、検出されたバックグラウンド信号および検出された第一の光信号に基づいて、コンピューティングデバイスによって判断することを含むことができる。光学構成要素の第一の部分の本体内または光学構成要素の第一の部分の表面上に一つまたは複数の欠陥が存在する場合、検出されたバックグラウンド信号および検出された第一の光信号に基づいて判断することは、第一の変調周波数に基づいて、検出されたバックグラウンド信号と検出された第一の光信号とを明確にすることを含む。
【0005】
第二の態様では、システムが提供される。システムは、光学構成要素を備える。システムはまた、光学構成要素を用いて周囲環境内の物体を検出するように構成されるセンシング装置を備える。さらに、システムは、第一の変調周波数に従って変調された第一の光信号で光学構成要素の第一の部分を照明するように構成される第一の光源を備える。さらに、システムは、第一の検出器を備える。第一の検出器は、光学構成要素を用いて、周囲環境に対応するバックグラウンド信号を検出するように構成されている。第一の検出器はまた、光学構成要素の第一の部分の本体内または光学構成要素の第一の部分の表面上に一つまたは複数の欠陥が存在する場合に、第一の光信号を検出するように構成される。さらに、システムは、光学構成要素の第一の部分の本体内または光学構成要素の第一の部分の表面上に一つまたは複数の欠陥が存在する場合、検出されたバックグラウンド信号および検出された第一の光信号に基づいて判断するように構成されるコンピューティングデバイスを備える。光学構成要素の第一の部分の本体内または光学構成要素の第一の部分の表面上に一つまたは複数の欠陥が存在する場合、検出されたバックグラウンド信号および検出された第一の光信号に基づいて判断することは、第一の変調周波数に基づいて、検出されたバックグラウンド信号と検出された第一の光信号とを明確にすることを含む。
【0006】
第三の態様では、コンピューティングデバイスが提供される。コンピューティングデバイスは、光学構成要素の第一の部分の本体内または光学構成要素の第一の部分の表面上に一つまたは複数の欠陥が存在する場合、検出されたバックグラウンド信号および検出された第一の光信号に基づいて判断するように構成される。光学構成要素の第一の部分の本体内または光学構成要素の第一の部分の表面上に一つまたは複数の欠陥が存在する場合、検出されたバックグラウンド信号および検出された第一の光信号に基づいて判断することは、第一の変調周波数に基づいて、検出されたバックグラウンド信号と検出された第一の光信号とを明確にすることを含む。検出されたバックグラウンド信号は周囲環境に対応し、光学構成要素を用いて第一の検出器によって検出された。センシング装置は、光学構成要素を用いて周囲環境内の物体を検出するように構成される。光学構成要素の第一の部分は、第一の光源による第一の光信号によって照明された。第一の光信号は、第一の変調周波数に従って変調された。第一の光信号は、光学構成要素の第一の部分の本体内または光学構成要素の第一の部分の表面上に一つまたは複数の欠陥が存在する場合、第一の検出器によって検出された。
【0007】
これらの並びに他の態様、利点、及び代替物は、当業者には、以下の詳細な説明を添付の図面を適宜参照して読み取ることにより明らかになるであろう。
【図面の簡単な説明】
【0008】
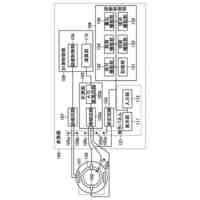
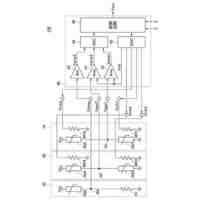
図1は、例示的な実施形態による、車両を例解する機能ブロック図である。
【0009】
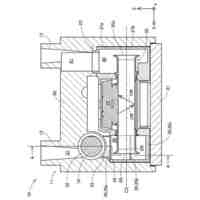
図2Aは、例示的な実施形態による、車両の物理的構成の例解図である。
【0010】
図2Bは、例示的な実施形態による、車両の物理的構成の例解図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ウェイモ エルエルシー
人工知能を使用して車両内の乗客を検出する
15日前
ウェイモ エルエルシー
自動運転車向けサーマルイメージング
22日前
ウェイモ エルエルシー
車両レーダ調整及び干渉低減のための方法及びシステム
11日前
ウェイモ エルエルシー
光検出および測距(LiDAR)装置ならびにカメラにおける欠陥検出のための時間的に変調された光の放射
3日前
個人
メジャー文具
1か月前
日本精機株式会社
検出装置
3日前
個人
採尿及び採便具
9日前
個人
アクセサリー型テスター
25日前
個人
高精度同時多点測定装置
24日前
ユニパルス株式会社
ロードセル
1か月前
株式会社ミツトヨ
測定器
15日前
甲神電機株式会社
電流検出装置
3日前
アズビル株式会社
電磁流量計
18日前
株式会社チノー
放射光測温装置
1か月前
株式会社ヨコオ
ソケット
1か月前
ダイキン工業株式会社
監視装置
29日前
トヨタ自動車株式会社
監視装置
1か月前
株式会社ヨコオ
ソケット
1か月前
個人
非接触による電磁パルスの測定方法
1日前
大和製衡株式会社
組合せ計量装置
12日前
大和製衡株式会社
組合せ計量装置
12日前
TDK株式会社
ガスセンサ
1か月前
愛知時計電機株式会社
ガスメータ
15日前
双庸電子株式会社
誤配線検査装置
4日前
長崎県
形状計測方法
25日前
愛知電機株式会社
軸部材の外観検査装置
12日前
ローム株式会社
半導体装置
23日前
ローム株式会社
半導体装置
23日前
日本信号株式会社
距離画像センサ
1日前
TDK株式会社
磁気センサ
1か月前
個人
システム、装置及び実験方法
18日前
TDK株式会社
ガスセンサ
1か月前
三恵技研工業株式会社
融雪レドーム
1か月前
日東精工株式会社
振動波形検査装置
4日前
日本特殊陶業株式会社
センサ
15日前
トヨタ自動車株式会社
測定システム
22日前
続きを見る
他の特許を見る











 特許ウォッチ
特許ウォッチ