TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025167090
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024071378
出願日
2024-04-25
発明の名称
圃場作業機
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20251030BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】容易に作業資材を補給する場所を特定でき、容易に走行車体を畦に寄せる畦寄せ走行を行うことができる圃場作業機を提供することを目的とする。
【解決手段】
圃場の外形の辺からなる特定辺を消費する農用資材の資材補給辺として設定でき、航法衛星を用いて走行機体の位置を検出可能な衛星測位ユニットと、圃場に対する作業が可能な作業装置と、走行車体が周回走行を行われている間における走行機体の位置の経時的な検出によって取得した走行機体の走行軌跡に基づいて圃場形状を算出可能な圃場形状算出部とを備え、作業走行制御部は、旋回経路の始端または終端領域から農用資材を補給するために走行車体を畦に寄せる畦寄せ走行を行うことができ、資材補給辺に寄せ付けるための補給自動走行制御または、遠隔操作具の操作によって手動操作で前記資材補給辺に寄せ付ける遠隔操作走行制御を備えたことを特徴とする。
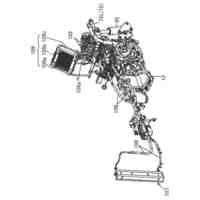
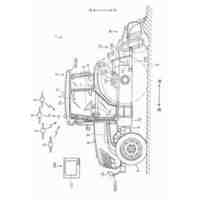
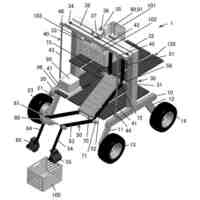
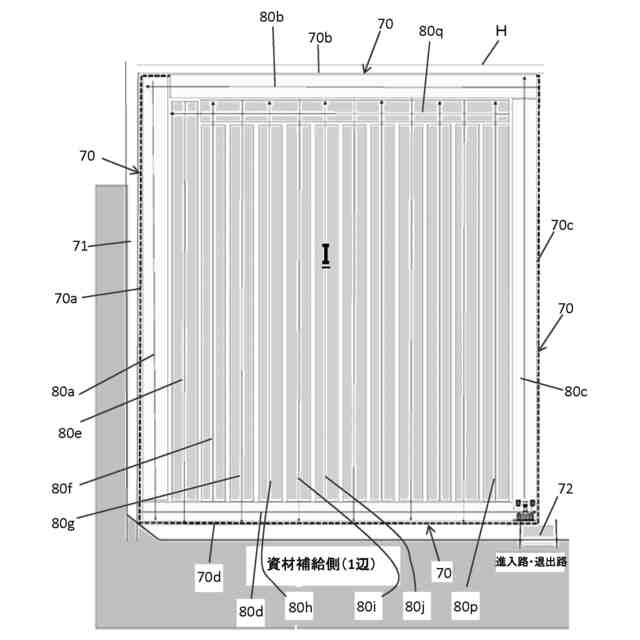
【選択図】 図4
特許請求の範囲
【請求項1】
作業走行経路と旋回経路とからなる目標走行経路を走行する自動往復走行を繰り返すことにより対地作業として圃場に農用資材を供給する圃場作業機で、
前記対地作業を行いながら前記自動往復走行を行う自動作業走行を制御する作業走行制御部とを備え、
前記圃場の外形の辺からなる特定辺を消費する農用資材の資材補給辺として設定でき、
航法衛星を用いて走行機体の位置を検出可能な衛星測位ユニットと、
圃場に対する作業が可能な作業装置と、
前記走行車体が周回走行を行われている間における前記走行機体の位置の経時的な検出によって取得した前記走行機体の走行軌跡に基づいて圃場形状を算出可能な圃場形状算出部とを備え、
前記作業走行制御部は、前記旋回経路の始端または終端領域から前記農用資材を補給するために前記走行車体を畦に寄せる畦寄せ走行を行うことができ、前記資材補給辺に寄せ付けるための補給自動走行制御または、遠隔操作具の操作によって手動操作で前記資材補給辺に寄せ付ける遠隔操作走行制御を備えたことを特徴とする圃場作業機。
続きを表示(約 210 文字)
【請求項2】
前記遠隔操作具により、前記補給自動走行制御または遠隔操作走行制御の実行可否を選択でき、実行可否の選択は前記走行車体が、前記畦寄せ走行を行う畦の近傍以外に位置しているときに受付可能であることを特徴とする請求項1に記載の圃場作業機。
【請求項3】
前記周回走行の一部またはすべての圃場に農用資材を供給する対地作業は行わない走行をすることを特徴とする請求項1または2に記載の圃場作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、田植機などの圃場作業機に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、自動走行により、圃場での作業走行を行う作業車両は、予めティーチング走行をして所定の目標走行経路を特定しておき、GNSS(Global Navi gation Satellite System)等を用いて算出した自機位置に基づいて目標走行経路に沿った自動走行を行っている(特許文献1,2)。
【先行技術文献】
【特許文献】
【0003】
特開2018-116608
特開2019-154394
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところでそのような自動走行をするにあたって、自動走行中に作業資材の補給が必要になるが、そのためには、作業資材を補給するための場所(畦)は、それぞれの圃場に適した場所で行えることが求められる。
【0005】
本発明は、このような従来の作業車両の課題を考慮し、容易に作業資材を補給する場所を特定でき、容易に走行車体を畦に寄せる畦寄せ走行を行うことができる圃場作業機を提供することを目的とする。
【課題を解決するための手段】
【0006】
第1の本発明は、
作業走行経路と旋回経路とからなる目標走行経路を走行する自動往復走行を繰り返すことにより対地作業として圃場に農用資材を供給する圃場作業機で、
前記対地作業を行いながら前記自動往復走行を行う自動作業走行を制御する作業走行制御部とを備え、
前記圃場の外形の辺からなる特定辺を消費する農用資材の資材補給辺として設定でき、
航法衛星を用いて走行機体の位置を検出可能な衛星測位ユニットと、
圃場に対する作業が可能な作業装置と、
前記走行車体が周回走行を行われている間における前記走行機体の位置の経時的な検出によって取得した前記走行機体の走行軌跡に基づいて圃場形状を算出可能な圃場形状算出部とを備え、
前記作業走行制御部は、前記旋回経路の始端または終端領域から前記農用資材を補給するために前記走行車体を畦に寄せる畦寄せ走行を行うことができ、前記資材補給辺に寄せ付けるための補給自動走行制御または、遠隔操作具の操作によって手動操作で前記資材補給辺に寄せ付ける遠隔操作走行制御を備えたことを特徴とする圃場作業機である。
【0007】
第2の本発明は、
前記遠隔操作具により、前記補給自動走行制御または遠隔操作走行制御の実行可否を選択でき、実行可否の選択は前記走行車体が、前記畦寄せ走行を行う畦の近傍以外に位置しているときに受付可能であることを特徴とする請求項1に記載の圃場作業機である。
【0008】
第3の本発明は、
前記周回走行の一部またはすべての圃場に農用資材を供給する対地作業は行わない走行をすることを特徴とする請求項1または2に記載の圃場作業機である。
【発明の効果】
【0009】
本発明により、容易に作業資材を補給する場所を特定でき、走行車体を畦に寄せる畦寄せ走行を行うことができる作業車両を実現できる。
【図面の簡単な説明】
【0010】
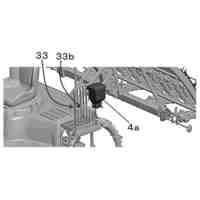
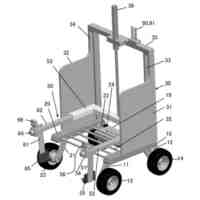
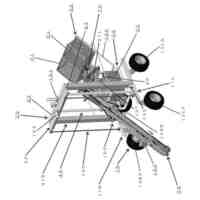
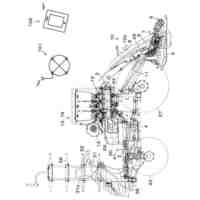
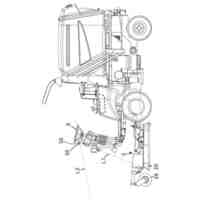
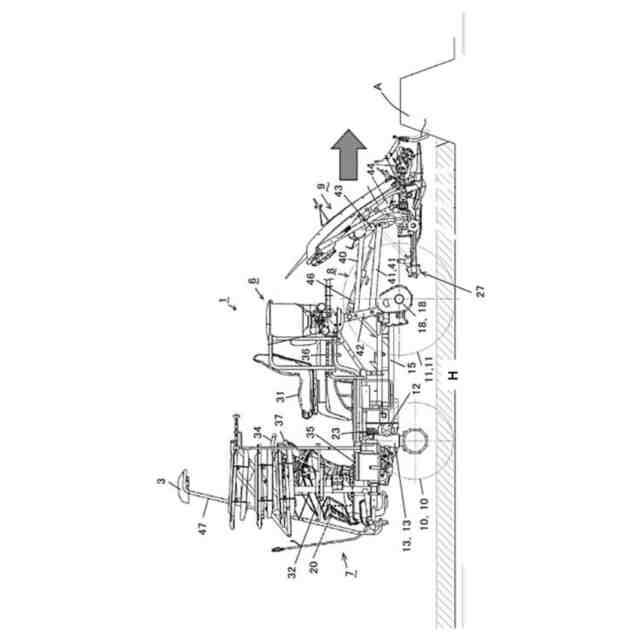
本発明における実施の形態にかかる作業車両の側面図
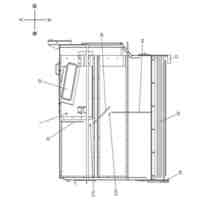
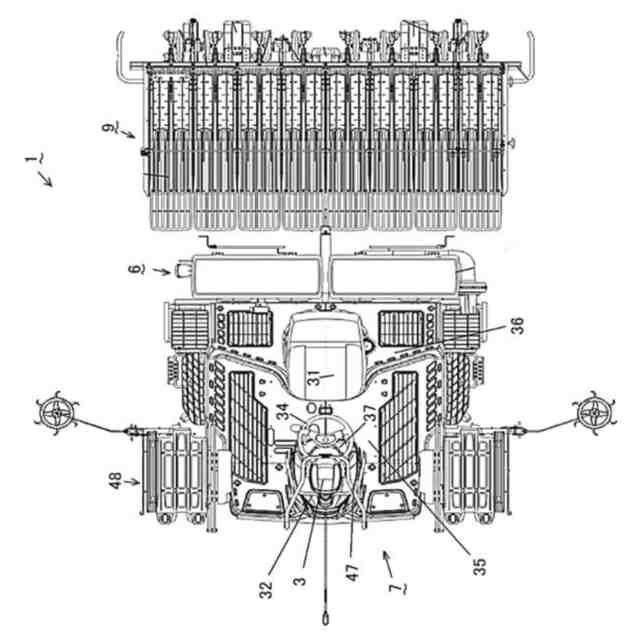
同作業車両の平面図
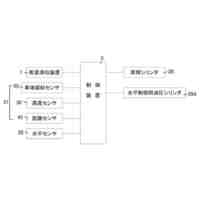
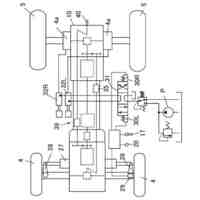
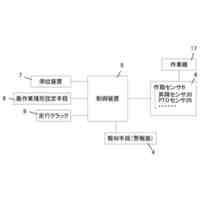
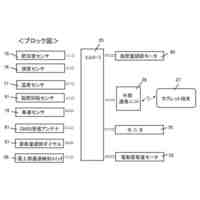
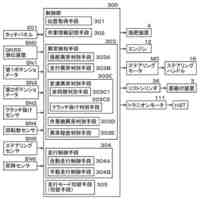
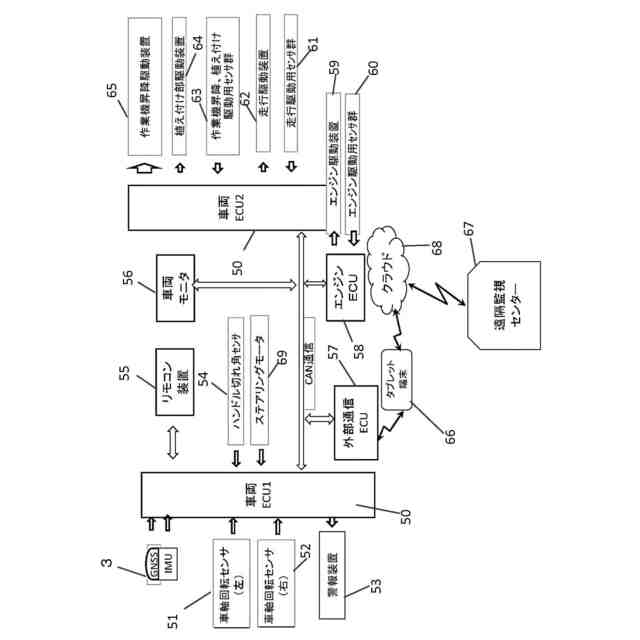
同作業車両の制御系の構成図
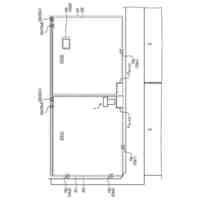
同作業車両が作業を行う圃場の平面図
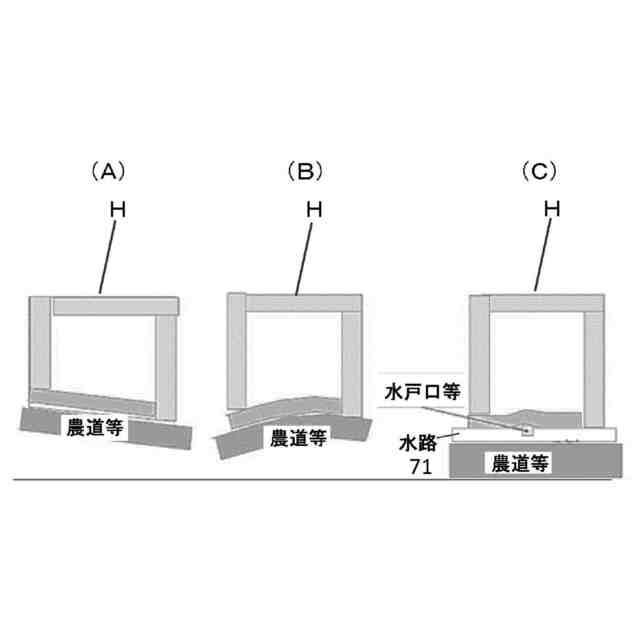
(A)、(B)、(C)圃場の種々の形状を示す平面図
本発明の実施の形態の変形例を示す圃場の平面図
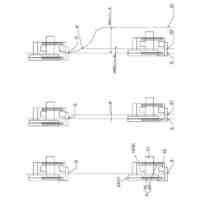
本発明の別の実施の形態の走行状況を示す平面図
同別の実施の形態の走行状況を示す平面図
同別の実施の形態の走行状況を示す平面図
同別の実施の形態の走行状況を示す平面図
同別の実施の形態の走行状況を示す平面図
同別の実施の形態の走行状況を示す平面図
同別の実施の形態の走行状況を示す平面図
同別の実施の形態の走行状況を示す平面図
同別の実施の形態の走行状況を示す平面図
同別の実施の形態の走行状況を示す平面図
同別の実施の形態の走行状況を示す平面図
同別の実施の形態の走行状況を示す平面図
同別の実施の形態の走行状況を示す平面図
同作業車両にもちいるリモコンの平面図
別の例の圃場の平面図
(A)、(B)、(C)、(D)圃場における従来の作業走行の状況を示す平面図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
農作業車
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
田植え機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
作業車両
28日前
井関農機株式会社
農作業車
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
15日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
8日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
29日前
井関農機株式会社
乗用芝刈機
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
23日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
水田作業機
10日前
井関農機株式会社
圃場作業機
今日
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ