TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024176219
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023094604
出願日
2023-06-08
発明の名称
制御装置
出願人
株式会社豊田自動織機
,
学校法人中部大学
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H02P
21/24 20160101AFI20241212BHJP(電力の発電,変換,配電)
要約
【課題】位置センサレス制御において、脱調の検出精度を向上させること。
【解決手段】制御装置は、γ軸電流値I
γ
とγ軸電流指令値I
*
γ
とに基づいて算出されたγ軸電圧指令値V
*
γ1
及びδ軸電流値I
δ
とδ軸電流指令値I
*
δ
とに基づいて算出されたδ軸電圧指令値V
*
δ1
と、所定の電圧値のγ軸電圧指令値V
*
γ2
及びゼロボルトのδ軸電圧指令値V
*
δ2
と、を選択的にγ軸電圧指令値V
*
γ
及びδ軸電圧指令値V
*
δ
として出力するγ-δ電圧指令値算出部53と、γ軸電圧指令値V
*
γ2
及びδ軸電圧指令値V
*
δ2
がγ軸電圧指令値V
*
γ
及びδ軸電圧指令値V
*
δ
として出力されている場合に、γ軸電流値I
γ
、δ軸電流値I
δ
、γ軸電圧指令値V
*
γ
及びδ軸電圧指令値V
*
δ
に基づいて推定位置誤差Δθ^
re
を算出し、推定位置誤差Δθ^
re
に基づいてモータの脱調を検出する検出部56と、を備える。
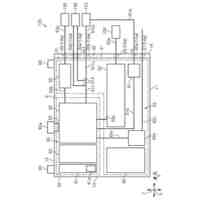
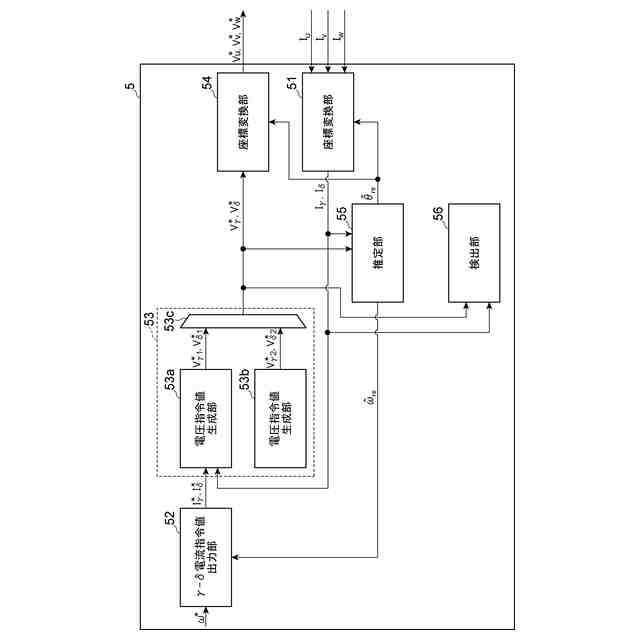
【選択図】図2
特許請求の範囲
【請求項1】
モータを駆動させるインバータを制御する駆動信号を生成する制御装置であって、
前記モータに流れる電流をγ軸電流値及びδ軸電流値に変換する電流値変換部と、
γ軸電流指令値及びδ軸電流指令値を出力するγ-δ電流指令値出力部と、
前記γ軸電流値と前記γ軸電流指令値とに基づいて算出された第1γ軸電圧指令値及び前記δ軸電流値と前記δ軸電流指令値とに基づいて算出された第1δ軸電圧指令値と、所定の電圧値の第2γ軸電圧指令値及びゼロボルトの第2δ軸電圧指令値と、を選択的にγ軸電圧指令値及びδ軸電圧指令値として出力するγ-δ電圧指令値算出部と、
前記γ軸電圧指令値及び前記δ軸電圧指令値を前記駆動信号に変換する駆動信号出力部と、
前記第2γ軸電圧指令値及び前記第2δ軸電圧指令値が前記γ軸電圧指令値及び前記δ軸電圧指令値として出力されている場合に、前記γ軸電流値、前記δ軸電流値、前記γ軸電圧指令値及び前記δ軸電圧指令値に基づいて、γ-δ座標系のγ軸とd-q座標系のd軸との位置誤差の推定値である推定位置誤差を算出し、前記推定位置誤差に基づいて前記モータの脱調を検出する検出部と、
を備える、制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
位置センサを用いないでモータを制御する位置センサレス制御が知られている。位置センサレス制御では、d-q座標系のd軸とγ-δ座標系のγ軸との電気角誤差が大きくなると、モータを制御できなくなる脱調が生じる。特許文献1には、モータに流れる電流値、モータパラメータ、及びモータの回転数指令値に基づいて、モータの磁束を演算し、演算値が閾値を下回った場合にモータが脱調を起こしたと判断する駆動装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2008-92787号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
低回転数領域においては逆起電力が小さいので、印加電圧が小さくなり、電圧誤差の影響が相対的に大きくなる。つまり、SN比(signal-to-noise ratio)が低下する。したがって、引用文献1に記載されているような、モータの電圧方程式を用いて脱調を検出する手法では、低回転数領域において、脱調の検出精度が低下するおそれがある。
【0005】
本開示は、位置センサレス制御において、脱調の検出精度を向上可能な制御装置を説明する。
【課題を解決するための手段】
【0006】
本開示の一側面に係る制御装置は、モータを駆動させるインバータを制御する駆動信号を生成する装置である。この制御装置は、モータに流れる電流をγ軸電流値及びδ軸電流値に変換する電流値変換部と、γ軸電流指令値及びδ軸電流指令値を出力するγ-δ電流指令値出力部と、γ軸電流値とγ軸電流指令値とに基づいて算出された第1γ軸電圧指令値及びδ軸電流値とδ軸電流指令値とに基づいて算出された第1δ軸電圧指令値と、所定の電圧値の第2γ軸電圧指令値及びゼロボルトの第2δ軸電圧指令値と、を選択的にγ軸電圧指令値及びδ軸電圧指令値として出力するγ-δ電圧指令値算出部と、γ軸電圧指令値及びδ軸電圧指令値を駆動信号に変換する駆動信号出力部と、第2γ軸電圧指令値及び第2δ軸電圧指令値がγ軸電圧指令値及びδ軸電圧指令値として出力されている場合に、γ軸電流値、δ軸電流値、γ軸電圧指令値及びδ軸電圧指令値に基づいて、γ-δ座標系のγ軸とd-q座標系のd軸との位置誤差の推定値である推定位置誤差を算出し、推定位置誤差に基づいてモータの脱調を検出する検出部と、を備える。
【0007】
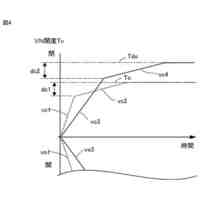
上記制御装置においては、第2γ軸電圧指令値及び第2δ軸電圧指令値がγ軸電圧指令値及びδ軸電圧指令値として出力されている場合に、γ軸電流値、δ軸電流値、γ軸電圧指令値及びδ軸電圧指令値に基づいて推定位置誤差が算出される。第2γ軸電圧指令値は、所定の電圧値の電圧指令値であり、第2δ軸電圧指令値は、ゼロボルトの電圧指令値である。したがって、第2γ軸電圧指令値及び第2δ軸電圧指令値がγ軸電圧指令値及びδ軸電圧指令値として出力されると、γ軸電圧値は所定の電圧値に収束し、δ軸電圧値はゼロボルトに収束する。γ軸電圧値が所定の電圧値となることにより、モータのトルクの増加を抑制しつつ、推定位置誤差の算出における電圧誤差の影響を低減することができる。上述のように算出された推定位置誤差に基づいてモータの脱調が検出されることにより、脱調の検出精度が向上し得る。以上により、位置センサレス制御において、脱調の検出精度を向上させることが可能となる。
【発明の効果】
【0008】
本開示によれば、位置センサレス制御において、脱調の検出精度を向上させることができる。
【図面の簡単な説明】
【0009】
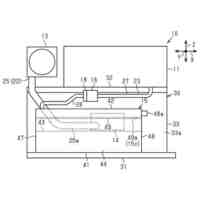
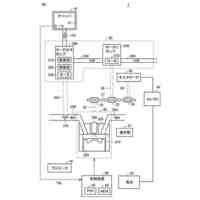
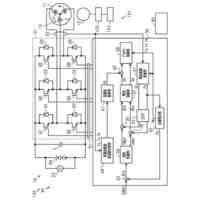
図1は、一実施形態に係る制御装置を含む制御システムの概略構成図である。
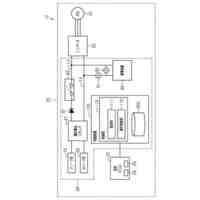
図2は、図1に示される演算器の機能構成を示すブロック図である。
図3は、d軸とγ軸との関係を説明するための図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照しながら一実施形態に係る制御装置を詳細に説明する。図面の説明において、同一又は同等の要素には同一符号が用いられ、重複する説明は省略される。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社豊田自動織機
車両
今日
株式会社豊田自動織機
産業車両
18日前
株式会社豊田自動織機
監視装置
18日前
株式会社豊田自動織機
希釈装置
8日前
株式会社豊田自動織機
流体機械
4日前
株式会社豊田自動織機
電動圧縮機
15日前
株式会社豊田自動織機
電動圧縮機
今日
株式会社豊田自動織機
電動圧縮機
今日
株式会社豊田自動織機
電動圧縮機
13日前
株式会社豊田自動織機
電動圧縮機
今日
株式会社豊田自動織機
自律走行車
12日前
株式会社豊田自動織機
電動圧縮機
19日前
株式会社豊田自動織機
電動圧縮機
20日前
株式会社豊田自動織機
骨格推定装置
21日前
株式会社豊田自動織機
流体圧シリンダ
4日前
株式会社豊田自動織機
燃料電池ユニット
13日前
株式会社豊田自動織機
燃料電池システム
15日前
株式会社豊田自動織機
真空排気システム
22日前
株式会社豊田自動織機
燃料電池ユニット
1日前
株式会社豊田自動織機
燃料電池ユニット
1日前
株式会社豊田自動織機
燃料電池モジュール
1日前
株式会社豊田自動織機
スクロール型圧縮機
12日前
株式会社豊田自動織機
燃料電池モジュール
1日前
株式会社豊田自動織機
燃料電池モジュール
1日前
株式会社豊田自動織機
燃料電池モジュール
1日前
株式会社豊田自動織機
機能構造体の製造方法
1日前
株式会社豊田自動織機
ラジエータ取付け構造
11日前
株式会社豊田自動織機
機能構造体の製造方法
7日前
株式会社豊田自動織機
電動機、及び電動圧縮機
1日前
トヨタ自動車株式会社
電池
22日前
株式会社豊田自動織機
牽引車両の操舵アシスト装置
19日前
トヨタ自動車株式会社
電池
14日前
株式会社豊田自動織機
表面実装型発熱部品の放熱構造
25日前
株式会社豊田自動織機
産業車両向け表示支援システム
15日前
トヨタ自動車株式会社
液系電池
8日前
株式会社豊田自動織機
燃料電池モジュール用接続検知装置
13日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ