TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025122722
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2024018322
出願日
2024-02-09
発明の名称
監視装置
出願人
株式会社豊田自動織機
代理人
弁理士法人ぱてな
主分類
B66F
9/24 20060101AFI20250815BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】作業区域の監視能力に優れた監視装置を提供する。
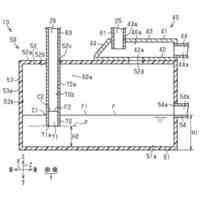
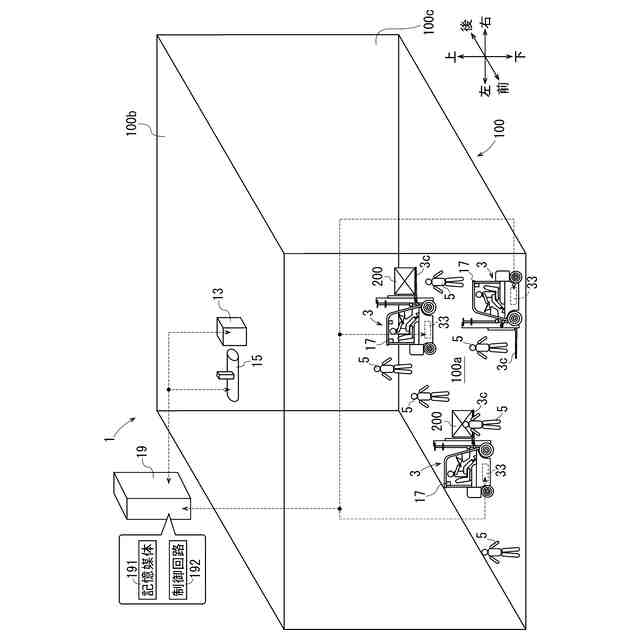
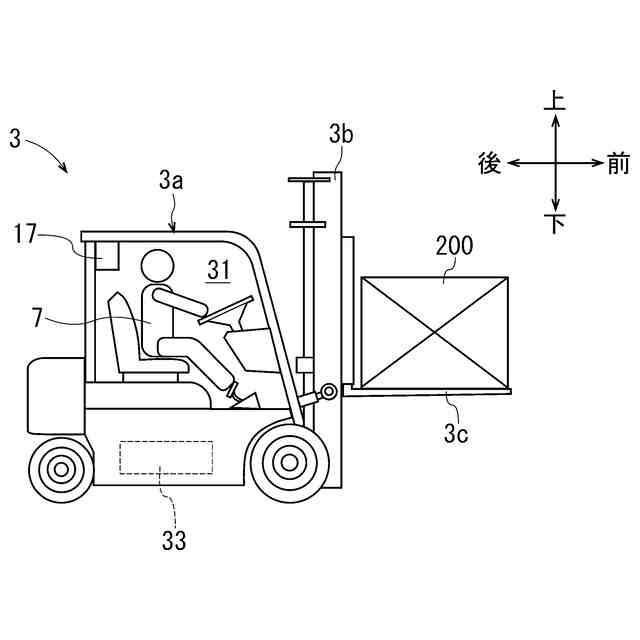
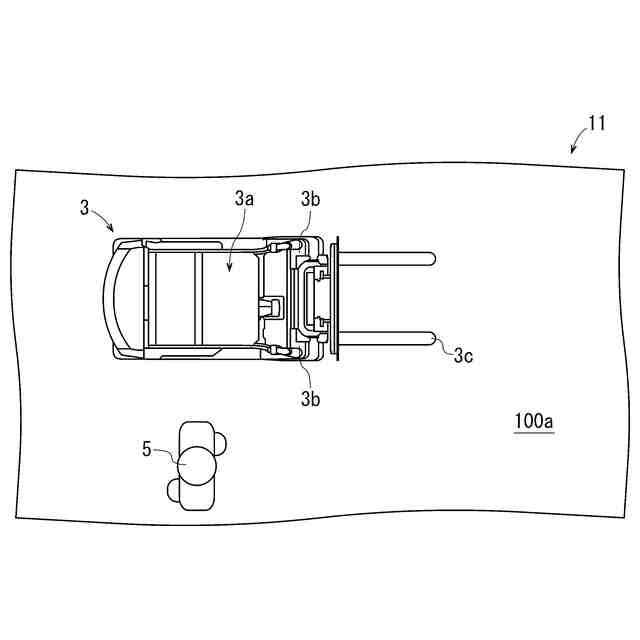
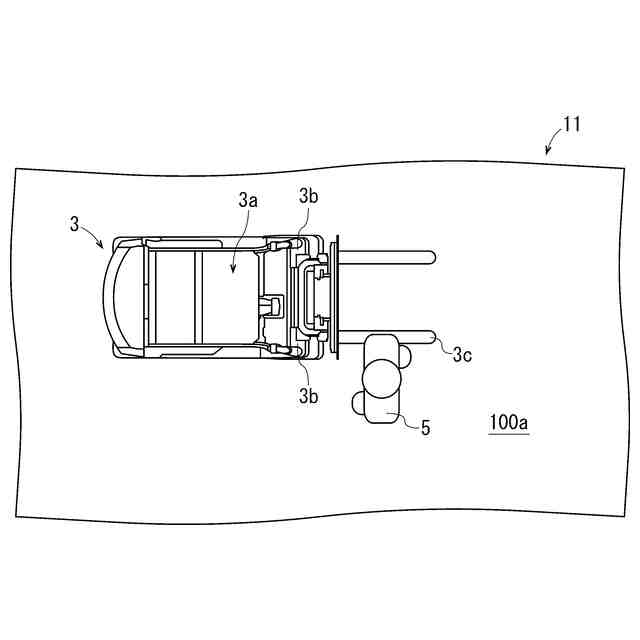
【解決手段】本発明の監視装置1は、荷役車両3によって荷物200の荷役作業が行われる作業区域100aの監視を行う。監視装置1は、カメラ13と、設定部及び判断部としての装置本体19とを備えている。カメラ13は、作業区域100a、荷役車両3、及び、対象体5が上方から撮影された撮影画像11を取得可能である。装置本体19は、撮影画像11に対し、荷役車両3における特定部位3cの輪郭に接する第1領域X1と、対象体5の輪郭に接する第2領域X2とを設定する。そして、装置本体19は、撮影画像11において、第1領域X1と第2領域X2とが所定値以上で重なっていれば、要注意状態であると判断する。
【選択図】図1
特許請求の範囲
【請求項1】
荷役車両によって荷物の荷役作業が行われる作業区域を監視する監視装置であって、
前記作業区域、前記荷役車両、及び、前記作業区域内に存在して前記荷役車両とは異なる対象体が上方から撮影された撮影画像を取得可能なカメラと、
前記撮影画像に対し、前記荷役車両における特定部位の輪郭に接する第1領域と、前記対象体の輪郭に接する第2領域とを設定する設定部と、
前記撮影画像において、前記第1領域と前記第2領域とが所定値以上で重なっていれば、要注意状態であると判断する判断部とを備えていることを特徴とする監視装置。
続きを表示(約 510 文字)
【請求項2】
前記設定部は、前記第1領域及び前記第2領域をそれぞれ矩形の平面状に設定し、
前記判断部は、前記第1領域と前記第2領域とが重なる個所を重複領域とするとともに、前記重複領域の面積が前記第1領域の面積に対して所定割合以上であれば、前記要注意状態であると判断する請求項1記載の監視装置。
【請求項3】
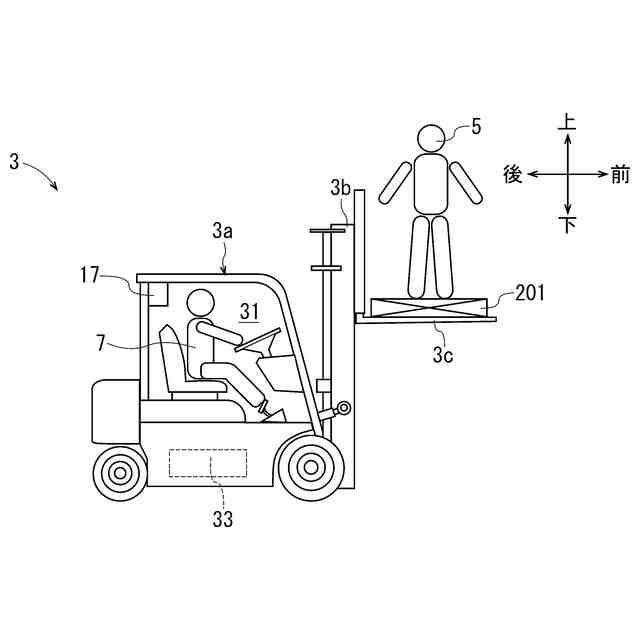
前記荷役車両は、前記荷物を載置しつつ昇降可能なフォークを有するフォークリフトであり、
前記特定部位は前記フォークであり、
前記対象体は人間である請求項1又は2記載の監視装置。
【請求項4】
前記判断部が前記要注意状態であると判断することにより、少なくとも前記人間に対して警告を行う警告部を備えている請求項3記載の監視装置。
【請求項5】
前記判断部が前記要注意状態であると判断することにより、前記荷役車両に対する動作規制を行う規制部を備えている請求項1又は2記載の監視装置。
【請求項6】
前記判断部が前記要注意状態であると判断した日時を監視記録として記憶する記憶部を備えている請求項1又は2記載の監視装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は監視装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
荷役車両によって荷物の荷役作業が行われる作業区域を監視する監視装置については、従来より種々提案されている。このような監視装置は、例えば特許文献1に開示されている。この監視装置は、カメラと、制御部とを備えている。カメラは荷役車両に取り付けられており、作業区域における荷役車両の後方となる個所を撮影した撮影画像を取得する。制御部は荷役車両に取り付けられており、カメラと接続されている。なお、荷役車両は、具体的には操縦者によって操縦される有人式のフォークリフトである。
【0003】
この監視装置では、カメラによって取得された撮影画像から制御部が対象体である人間の人画像を抽出する。また、制御部は、人画像の骨格を仮想骨格として推定するとともに、抽出した人画像に仮想骨格を対応付けるとともに、仮想骨格の一部の長さを測定する。そして、制御部は、測定した仮想骨格の一部の長さが閾値を超えた場合には、荷役車両の後方に人間が接近していると判断する。こうして、この監視装置では作業区域の監視を行う。また、この監視装置では、荷役車両の後方に人間が接近していると判断した場合、荷役車両の操縦者に対し、荷役車両の後方に人間が接近していることの報知を行う。
【先行技術文献】
【特許文献】
【0004】
特開2022-96845号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
この種の監視装置において、荷役車両における特定部位と、対象体とが接近しているか否かを監視することが考えられる。しかし、上記従来の監視装置では、荷役車両に取り付けられたカメラが作業区域における荷役車両の後方となる個所を撮影する。このため、荷役車両において、特定部位及び対象体がカメラよりも前方に存在する場合、これらの特定部位及び対象体は、撮影時におけるカメラの死角に位置することになる。これにより、この監視装置では、作業区域において、現に特定部位に対して対象体が前方から接近している場合であっても、制御部は、特定部位と対象体とが接近していると判断することができない。この結果、この監視装置は作業区域の監視を十分に行うことができない。
【0006】
本発明は、上記従来の実情に鑑みてなされたものであって、作業区域の監視能力に優れた監視装置を提供することを解決すべき課題としている。
【課題を解決するための手段】
【0007】
本発明の監視装置は、荷役車両によって荷物の荷役作業が行われる作業区域を監視する監視装置であって、
前記作業区域、前記荷役車両、及び、前記作業区域内に存在して前記荷役車両とは異なる対象体が上方から撮影された撮影画像を取得可能なカメラと、
前記撮影画像に対し、前記荷役車両における特定部位の輪郭に接する第1領域と、前記対象体の輪郭に接する第2領域とを設定する設定部と、
前記撮影画像において、前記第1領域と前記第2領域とが所定値以上で重なっていれば、要注意状態であると判断する判断部とを備えていることを特徴とする。
【0008】
本発明の監視装置では、カメラが作業区域、荷役車両及び対象体が上方から撮影された撮影画像を取得可能である。これにより、この監視装置では、特定部位が撮影時のカメラの死角に位置し難い。また、この監視装置では、作業区域において、対象体が特定部位に対していずれの位置に存在していても、撮影時のカメラの死角に位置し難い。
【0009】
これらのため、この監視装置では、カメラが特定部位を含め荷役車両と、対象体とを好適に撮影することができる。これにより、この監視装置では、設定部が撮影画像に対して第1領域及び第2領域を好適に設定することができる。このため、判断部は、撮影画像において第1領域と第2領域とが所定値以上で重なっているか否かを精度高く判断できることから、判断部は、第1領域と第2領域とが所定値以上で重なっている際に要注意状態であると好適に判断できる。
【0010】
したがって、本発明の監視装置は、作業区域の監視能力に優れている。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社豊田自動織機
過給機
18日前
株式会社豊田自動織機
監視装置
8日前
株式会社豊田自動織機
産業車両
8日前
株式会社豊田自動織機
自律走行車
2日前
株式会社豊田自動織機
電動圧縮機
3日前
株式会社豊田自動織機
電動圧縮機
10日前
株式会社豊田自動織機
電動圧縮機
5日前
株式会社豊田自動織機
電動圧縮機
9日前
株式会社豊田自動織機
骨格推定装置
11日前
株式会社豊田自動織機
自己位置推定装置
24日前
株式会社豊田自動織機
燃料電池システム
22日前
株式会社豊田自動織機
燃料電池ユニット
3日前
株式会社豊田自動織機
真空排気システム
12日前
株式会社豊田自動織機
燃料電池システム
5日前
株式会社豊田自動織機
スクロール型圧縮機
2日前
株式会社豊田自動織機
スクロール型圧縮機
23日前
株式会社豊田自動織機
ラジエータ取付け構造
1日前
株式会社豊田自動織機
電動機、及び電動圧縮機
18日前
トヨタ自動車株式会社
電池
4日前
株式会社豊田自動織機
牽引車両の操舵アシスト装置
9日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
電池
18日前
株式会社豊田自動織機
表面実装型発熱部品の放熱構造
15日前
株式会社豊田自動織機
産業車両向け表示支援システム
5日前
株式会社豊田自動織機
燃料電池モジュール用接続検知装置
3日前
株式会社豊田自動織機
燃料電池モジュール用接続検知装置
3日前
株式会社豊田自動織機
内燃機関の排気浄化装置及びその制御方法
2日前
株式会社豊田自動織機
物品検出装置、物品検出方法、及び産業車両
15日前
トヨタ自動車株式会社
電池の製造方法及び電池
18日前
トヨタ自動車株式会社
蓄電モジュールの製造方法
4日前
株式会社豊田自動織機
多気筒圧縮着火式内燃機関の制御装置および制御方法
5日前
株式会社豊田自動織機
蓄電モジュール製造方法および蓄電モジュール製造システム
9日前
株式会社豊田自動織機
蓄電モジュール製造方法および蓄電モジュール製造システム
9日前
株式会社豊田自動織機
蓄電モジュール製造方法および蓄電モジュール製造システム
9日前
株式会社豊田中央研究所
燃料改質装置及びそれを備えた内燃機関
18日前
トヨタ自動車株式会社
骨格推定装置、骨格推定方法、及びプログラム
4日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ