TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025024398
公報種別
公開特許公報(A)
公開日
2025-02-20
出願番号
2023128469
出願日
2023-08-07
発明の名称
制御システム、プラントシステム、コントローラ、及び制御方法
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
主分類
G05B
9/03 20060101AFI20250213BHJP(制御;調整)
要約
【課題】主コントローラから副コントローラへの切り替えの迅速性と、主コントローラと副コントローラとの処理負荷の軽減と、の両立に有効なシステムを提供する。
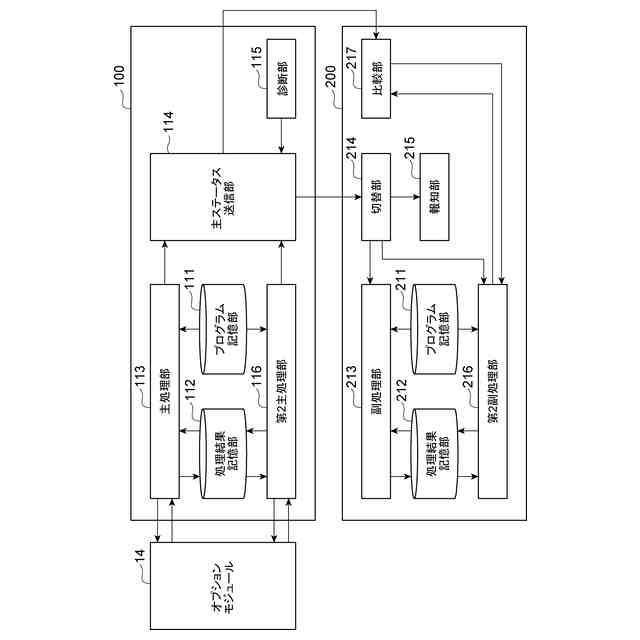
【解決手段】制御システム10は、主コントローラ100と、副コントローラ200と、を備え、主コントローラ100は、副コントローラ200による複数の処理の進捗に関わらずに、複数の処理を順次実行して制御対象2を制御することを制御周期で繰り返す主処理部113を有し、副コントローラ200は、主処理部113による複数の処理の進捗に追従して複数の処理を順次実行する副処理部213と、異常により主処理部113が複数の処理を中止した場合に、主処理部113による複数の処理の進捗に関わらずに副処理部213に複数の処理の実行を継続させ、副処理部213による制御対象2の制御を開始させる切替部214と、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
制御対象を制御する主コントローラと、
前記主コントローラに異常が生じた場合に、前記主コントローラに代わって前記制御対象を制御する副コントローラと、
を備え、
前記主コントローラは、前記副コントローラによる複数の処理の進捗に関わらずに、前記複数の処理を順次実行して前記制御対象を制御することを制御周期で繰り返す主処理部を有し、
前記副コントローラは、
前記主処理部による前記複数の処理の進捗に追従して前記複数の処理を順次実行する副処理部と、
前記異常により前記主処理部が前記複数の処理を中止した場合に、前記主処理部による前記複数の処理の進捗に関わらずに前記副処理部に前記複数の処理の実行を継続させ、前記副処理部による前記制御対象の制御を開始させる切替部と、
を有する、
制御システム。
続きを表示(約 1,500 文字)
【請求項2】
前記主コントローラは、前記複数の処理の進捗として、処理ごとの完了通知を前記副コントローラに順次送信する主ステータス送信部を更に有し、
前記副処理部は、1の処理の前記完了通知を受信した後に次の処理を実行することで、前記主処理部による前記複数の処理の進捗に追従して前記複数の処理を順次実行する、
請求項1記載の制御システム。
【請求項3】
前記切替部は、前記完了通知の受信遅延に基づいて、前記異常により前記主処理部が前記複数の処理を中止したことを検出する、
請求項2記載の制御システム。
【請求項4】
前記切替部は、前記副処理部が1の処理の前記完了通知を待機している時間の長さが所定の閾値を超えた場合に、前記異常により前記主処理部が前記複数の処理を中止したことを検出する、
請求項3記載の制御システム。
【請求項5】
前記主コントローラは、所定の診断処理の実行結果に基づいて前記異常の有無を診断する診断部を更に有し、
前記主ステータス送信部は、前記診断部により前記異常があると診断された場合に異常通知を前記副コントローラに送信し、
前記切替部は、前記主ステータス送信部からの前記異常通知に更に基づいて、前記異常により前記主処理部が前記複数の処理を中止したことを検出する、
請求項3又は4記載の制御システム。
【請求項6】
前記複数の処理は、1以上の入力値を取得する入力処理を含み、
前記主処理部は、前記入力処理において、前記制御対象から前記1以上の入力値を取得し、
前記副処理部は、前記入力処理において、前記主処理部が取得した前記1以上の入力値を前記主コントローラから取得し、
前記切替部は、前記異常により前記主処理部が前記複数の処理を中止した場合に、前記副処理部による前記1以上の入力値の取得先を前記主コントローラから前記制御対象に切り替える、
請求項1~4のいずれか一項記載の制御システム。
【請求項7】
前記切替部は、前記主処理部が中止した処理が前記入力処理である場合に、中止された前記入力処理の開始から、前記副処理部に前記複数の処理を継続させる、
請求項6記載の制御システム。
【請求項8】
前記複数の処理は、前記1以上の出力値を出力する出力処理を含み、
前記主処理部は、前記出力処理において、前記1以上の出力値を前記制御対象に出力し、
前記副処理部は、前記出力処理において、前記1以上の出力値を前記制御対象に出力せずに、前記主処理部による前記出力処理の完了に応じて次の処理を実行し、
前記切替部は、前記異常により前記主処理部が前記複数の処理を中止した場合に、前記副処理部による前記出力処理において、前記1以上の出力値を前記制御対象に出力させる、
請求項1~4のいずれか一項記載の制御システム。
【請求項9】
前記切替部は、前記主処理部が中止した処理が前記出力処理である場合に、中止された前記出力処理の開始から、前記副処理部に前記複数の処理を継続させる、
請求項8記載の制御システム。
【請求項10】
前記複数の処理は、前記制御対象に対する入出力を含まない演算処理を含み、
前記切替部は、前記主処理部が中止した処理が前記演算処理である場合には、中止された前記演算処理の開始まで戻すことなく、前記副処理部に前記複数の処理を継続させる、
請求項1~4のいずれか一項記載の制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御システム、プラントシステム、コントローラ、及び制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1には、コントローラ冗長化システムが開示されている。コントローラ冗長化システムにおいて、各コントローラは、予め各演算の実行順序を記憶する実行順序記憶手段と、所定のときに、その時点における自コントローラにおける演算実行状況を、相手側コントローラに通知する状況通知手段と、相手側コントローラから通知された演算実行状況と、実行順序記憶手段とに基づいて、自コントローラの演算実行状況が相手側コントローラよりも遅れているか進んでいるか同じであるかを判定するタイミング確認手段と、タイミング確認手段によって相手側コントローラよりも遅れていると判定された場合には、自コントローラの演算実行状況が相手側コントローラと同じとなるまで演算を実行し、実行完了した完了通知を相手側コントローラに通知するずれ修正手段と、を有する。
【先行技術文献】
【特許文献】
【0003】
特開2015-170053号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、異常発生時における主コントローラから副コントローラへの切り替えの迅速性と、主コントローラと副コントローラとの処理負荷の軽減と、の両立に有効なシステムを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係る制御システムは、制御対象を制御する主コントローラと、主コントローラに異常が生じた場合に、主コントローラに代わって制御対象を制御する副コントローラと、を備え、主コントローラは、副コントローラによる複数の処理の進捗に関わらずに、複数の処理を順次実行して制御対象を制御することを制御周期で繰り返す主処理部を有し、副コントローラは、主処理部による複数の処理の進捗に追従して複数の処理を順次実行する副処理部と、異常により主処理部が複数の処理を中止した場合に、主処理部による複数の処理の進捗に関わらずに副処理部に複数の処理の実行を継続させ、副処理部による制御対象の制御を開始させる切替部と、を有する。
【0006】
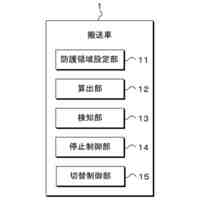
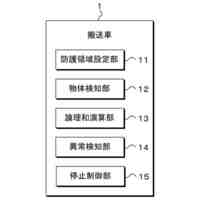
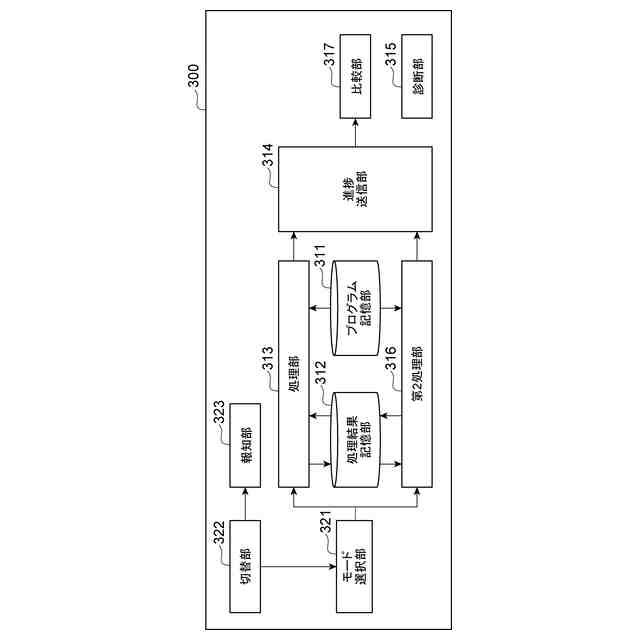
本開示の他の側面に係るコントローラは、他のコントローラと共に冗長化制御システムを構成するコントローラであって、予め定められた設定に基づいて、主モードと、副モードとのいずれかを選択するモード選択部と、主モードにおいて、他のコントローラによる複数の処理の進捗に関わらずに、複数の処理を順次実行して制御対象を制御することを制御周期で繰り返し、副モードにおいて、他のコントローラによる複数の処理の進捗に追従して複数の処理を順次実行する、処理部と、副モードにおいて、異常により他のコントローラが複数の処理を中止した場合に、モード選択部に主モードを選択させる切替部と、を備える。
【0007】
本開示の更に他の側面に係る制御方法は、副コントローラと冗長化システムを構成する主コントローラにおいて、副コントローラによる複数の処理の進捗に関わらずに、複数の処理を順次実行して制御対象を制御することを制御周期で繰り返すことと、副コントローラにおいて、主コントローラによる複数の処理の進捗に追従して複数の処理を順次実行することと、異常により主コントローラが複数の処理を中止した場合に、主コントローラによる複数の処理の進捗に関わらずに複数の処理の実行を継続させ、制御対象の制御を開始することと、を含む。
【発明の効果】
【0008】
本開示によれば、異常発生時における主コントローラから副コントローラへの切り替えの迅速性と、主コントローラと副コントローラとの処理負荷の軽減と、の両立に有効なシステムを提供することができる。
【図面の簡単な説明】
【0009】
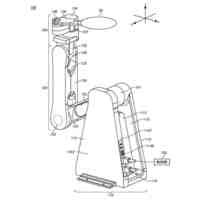
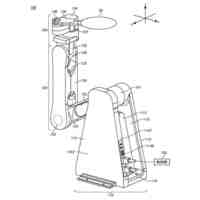
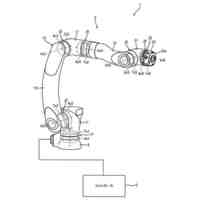
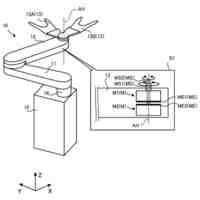
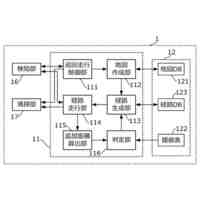
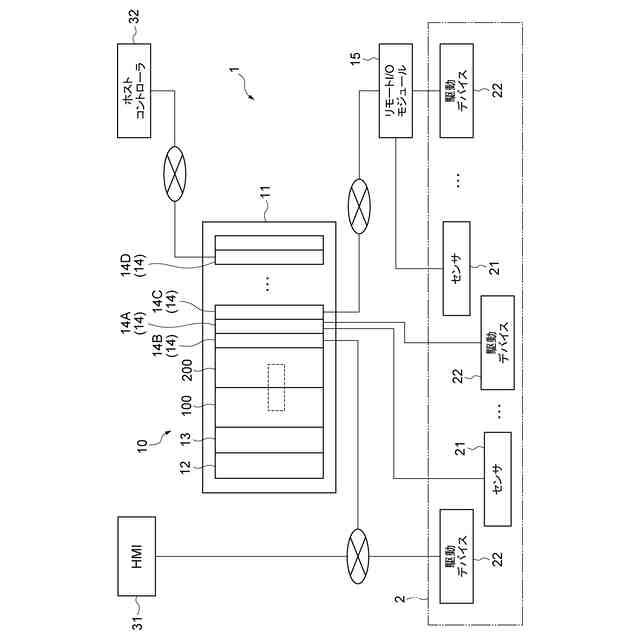
プラントシステムの構成を例示する模式図である。
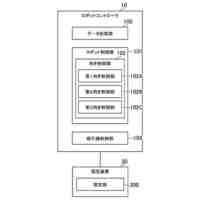
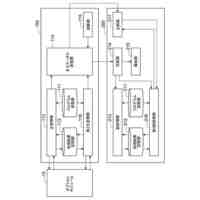
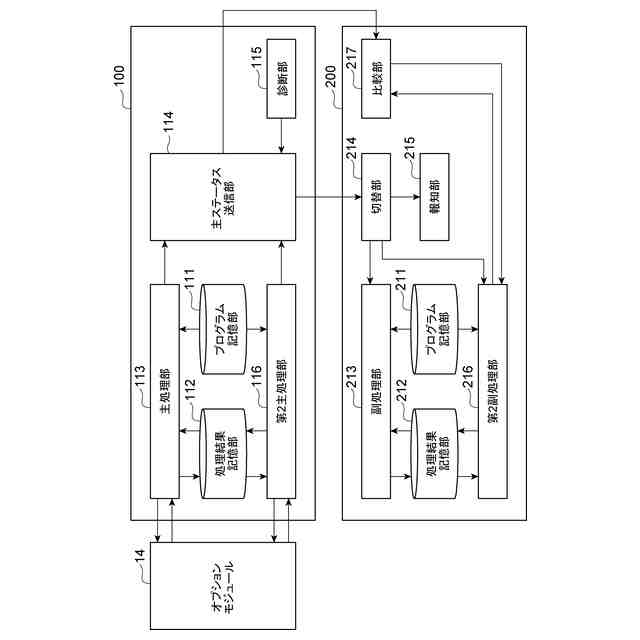
二重化されたCPUモジュールの機能的な構成を例示するブロック図である。
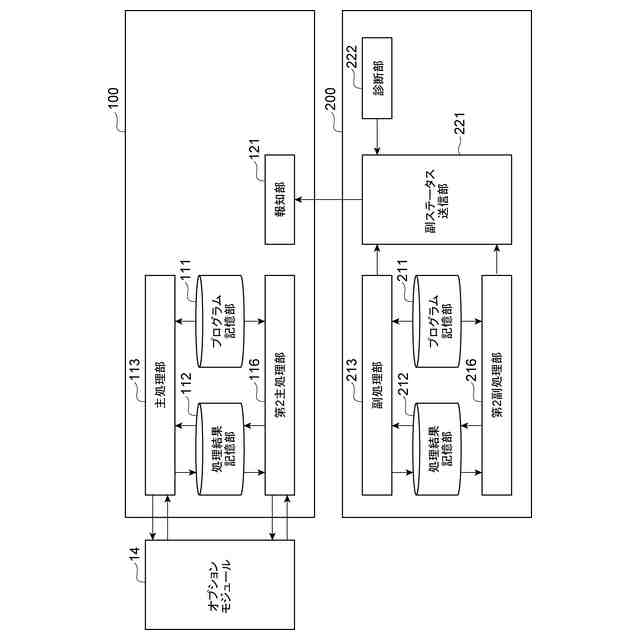
二重化されたCPUモジュールの変形例を示すブロック図である。
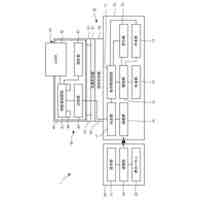
主副両用のCPUモジュールの機能的な構成を例示するブロック図である。
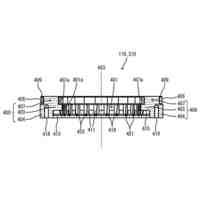
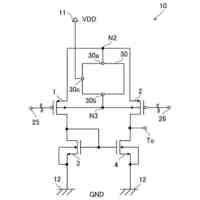
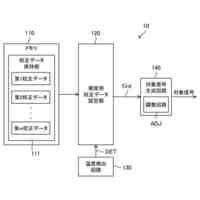
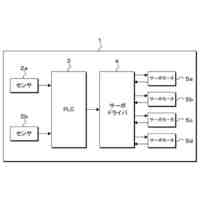
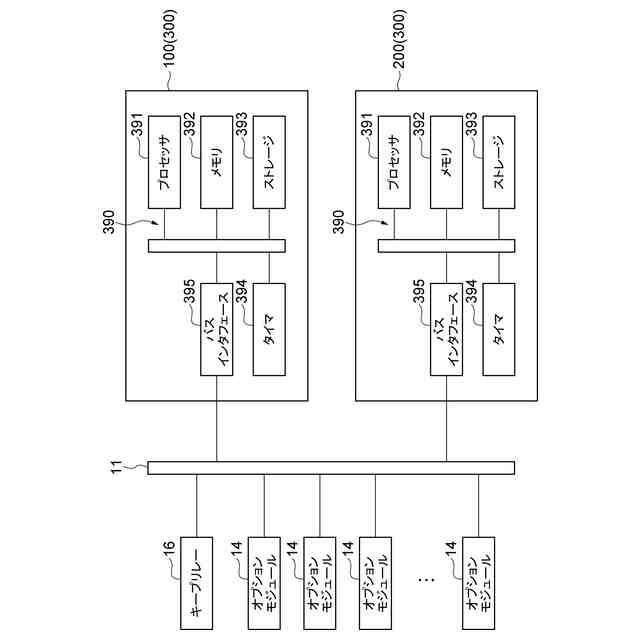
CPUモジュールのハードウェア構成を例示する図である。
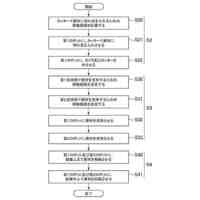
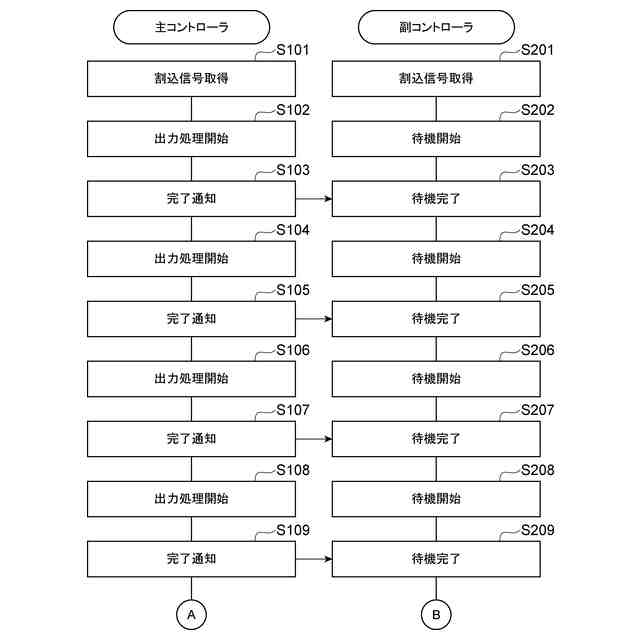
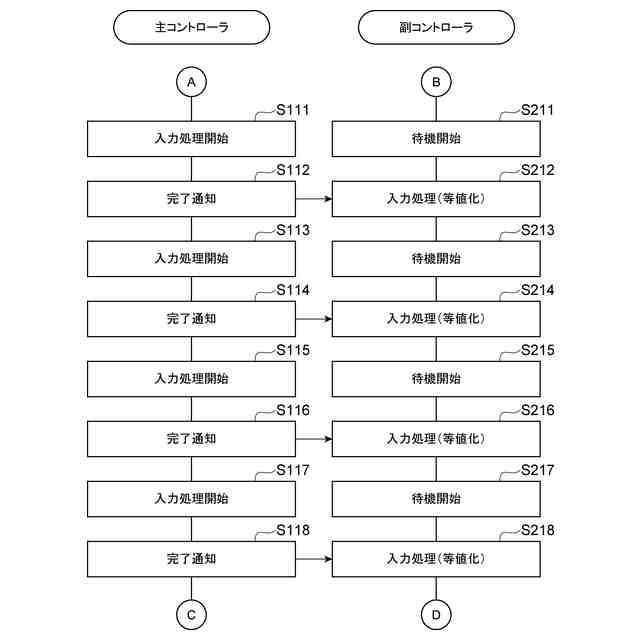
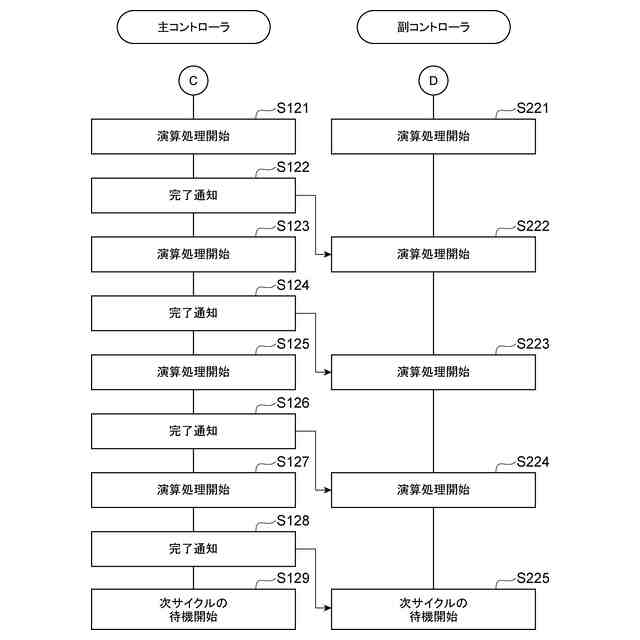
二重化制御における主コントローラ及び副コントローラの第1処理手順を例示するフローチャートである。
二重化制御における主コントローラ及び副コントローラの第1処理手順を例示するフローチャートである。
二重化制御における主コントローラ及び副コントローラの第1処理手順を例示するフローチャートである。
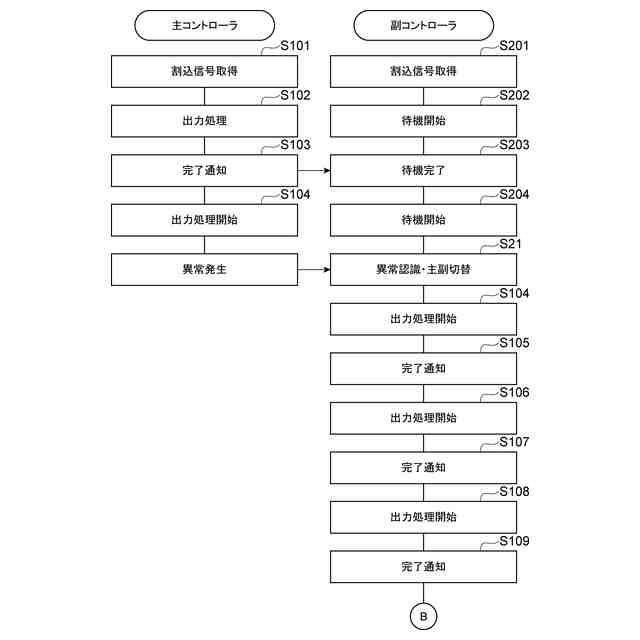
第1処理手順の途中で生じた異常に対応する切り替え手順を例示するフローチャートである。
第1処理手順の途中で生じた異常に対応する切り替え手順を例示するフローチャートである。
第1処理手順の途中で生じた異常に対応する切り替え手順を例示するフローチャートである。
副コントローラで異常が生じた場合の報知手順を例示するフローチャートである。
二重化制御における主コントローラ及び副コントローラの第2処理手順を例示するフローチャートである。
第2処理手順における第1処理手順の割り込みを例示するフローチャートである。
第2処理手順の途中で生じた異常に対応する切り替え手順を例示するフローチャートである。
【発明を実施するための形態】
【0010】
以下、実施形態について、図面を参照しつつ詳細に説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット及びシステム
2か月前
株式会社安川電機
システム及びロボット
2か月前
株式会社安川電機
ロボット、ロボットの製造方法
5日前
株式会社安川電機
ロボット、ロボットの製造方法
5日前
株式会社安川電機
制御装置及び制御装置の冷却方法
1か月前
株式会社安川電機
ロボットシステム及びロボット制御方法
3か月前
株式会社安川電機
ロボット制御システム及び梱包資材の切断方法
4か月前
株式会社安川電機
ロボットシステム、コントローラ及び制御方法
1か月前
株式会社安川電機
ロボット、システム、制御方法、及びプログラム
2か月前
株式会社安川電機
ロボット、システム、制御方法、及びプログラム
2か月前
株式会社安川電機
ロボットシステム、ロボット、ロボットの制御方法
19日前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
3日前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
3日前
株式会社安川電機
制御システム、プラントシステム、コントローラ、及び制御方法
3か月前
株式会社安川電機
ロボット制御システム、ロボットコントローラ、及びロボット制御方法
2か月前
株式会社安川電機
搬送ロボットおよびロボットシステム
1か月前
エイブリック株式会社
基準電圧回路
1か月前
三栄ハイテックス株式会社
基準電圧回路
2日前
トヨタ自動車株式会社
ペダル機構
16日前
株式会社ダイフク
搬送設備
17日前
三菱電機株式会社
自己位置推定装置
26日前
トヨタ自動車株式会社
移動体、及び制御方法
24日前
株式会社やまびこ
走行制御装置
1か月前
株式会社タブチ
減圧弁
1か月前
株式会社計数技研
移動体、及びプログラム
17日前
WHILL株式会社
電動モビリティ
25日前
株式会社ダイヘン
搬送車
24日前
日本信号株式会社
自走式装置
1か月前
株式会社ダイヘン
搬送車
1か月前
ローム株式会社
半導体装置
5日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ