TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025044659
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023152369
出願日
2023-09-20
発明の名称
制御装置、コントローラおよび電子制御装置
出願人
ローム株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05B
9/03 20060101AFI20250326BHJP(制御;調整)
要約
【課題】ステータス信号で、より多くの情報を提供できるようにする。
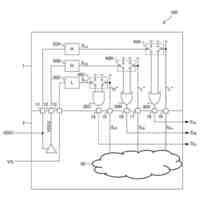
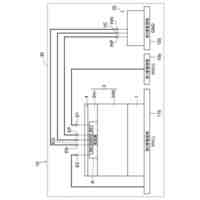
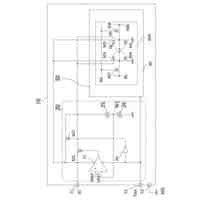
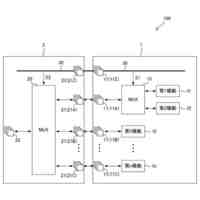
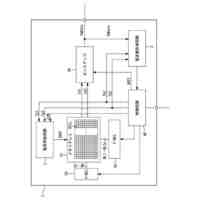
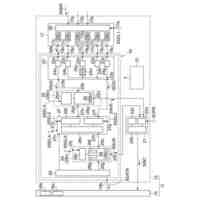
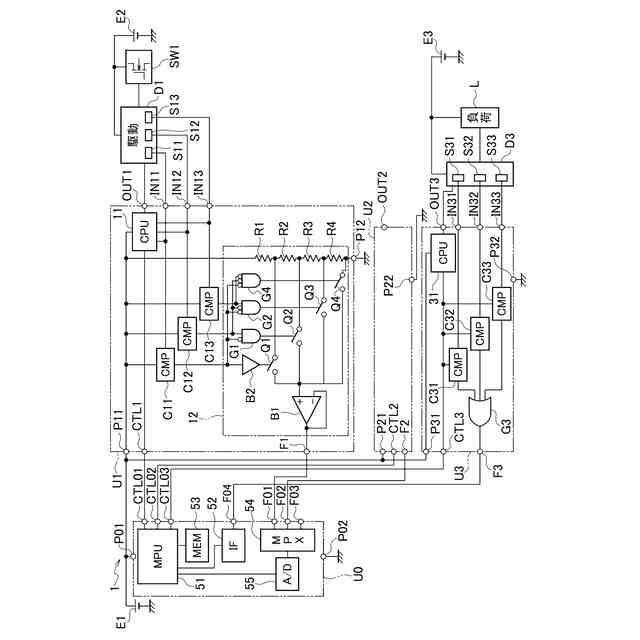
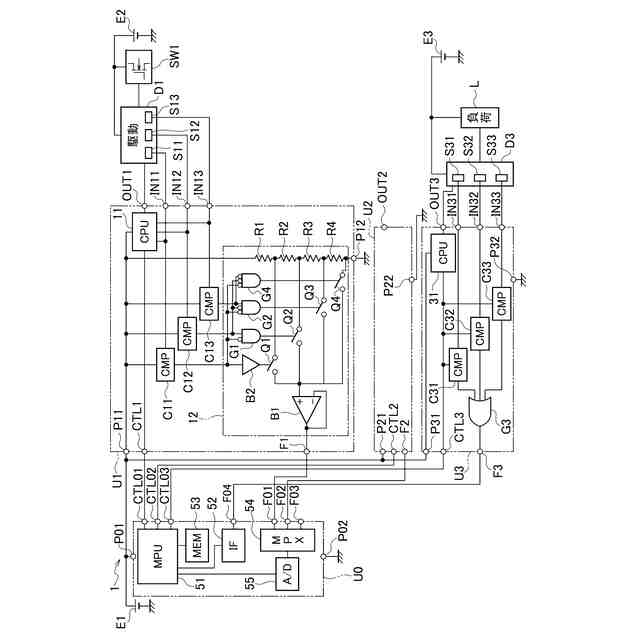
【解決手段】ステータス信号の一例であるフォルト信号を、制御装置U1、U2、U3からコントローラU0へ送信する電子制御装置1において、制御装置U1は、制御対象(D1)に関して、センサS11、S12、S13で複数の監視要因を監視する。監視結果は、第1の制御回路11での制御に使用されるとともに、検出回路C11、C12、C13で2値判定される。その判定結果は、種別判定回路12で統合されてフォルト端子F1から出力される。その際、種別判定回路12は、フォルト状態となると、その要因に応じて、フォルト信号のアクティブ側のレベルを微小なレベルΔ1、Δ2、Δ3だけ、シフトさせて、フォルト端子F1から出力する。コントローラU0は、フォルト端子F01で受信したフォルト信号を、種別復号部(55)で復号し、フォルトの要因を認識する。
【選択図】図1
特許請求の範囲
【請求項1】
1または複数の制御対象を制御する制御装置において、
前記制御対象に関して、相互に異なる複数の監視要因でそれぞれ監視し、予め定める態様となったことを検出すると、ハイレベルまたはローレベルの2値信号で出力されているステータス信号を、その予め定める態様を表す一方のレベルとする複数の検出回路と、
前記制御対象の制御を行い、前記ステータス信号から、前記複数の検出回路の少なくとも1つで前記予め定める態様が検出された際に、その態様に応じた制御も行う第1の制御回路と、
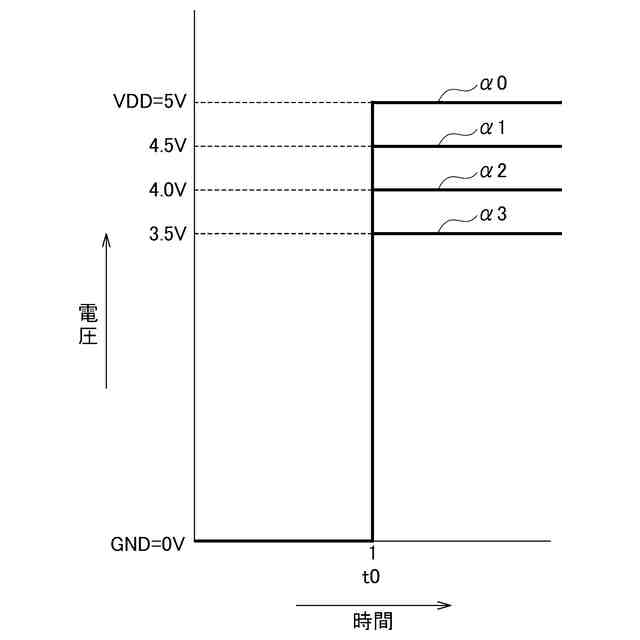
前記複数の検出回路のステータス信号を統合し、かつ前記複数の検出回路のステータス信号の何れで前記予め定める態様の監視要因が検出されたのかの種別判定を行い、その判定結果に応じて、前記ステータス信号を、前記予め定める態様を表す一方のレベル側で、予め定める微小な1または複数のレベルだけ、前記一方のレベルからシフトさせて出力する種別判定回路とを備える、制御装置。
続きを表示(約 830 文字)
【請求項2】
前記第1の制御回路は、前記予め定める態様に応じた制御を行う際に、前記種別判定回路の判定結果を考慮した制御を行う、請求項1記載の制御装置。
【請求項3】
前記請求項1記載の制御装置の1または複数から、前記ステータス信号が入力される1または複数の外部入力端と、
前記外部入力端に対応する判定回路と、
前記判定回路の判定結果を利用する第2の制御回路とを備え、
前記判定回路は、前記ステータス信号が一方のレベルになったことから、前記制御装置が予め定める態様の監視要因となったことを判定するものであり、その判定側において、前記ハイレベルまたはローレベルの一方のレベルから、予め定める微小なレベルシフト量を検出した場合は、その検出結果から、前記予め定める態様となった監視要因の種別を復号する種別復号部を備える、コントローラ。
【請求項4】
前記種別復号部は、アナログ/デジタルコンバータである、請求項3記載のコントローラ。
【請求項5】
前記請求項1記載の制御装置に、前記請求項3記載のコントローラを備える、
電子制御装置。
【請求項6】
前記ステータス信号は、前記監視要因が異常状態であることを表すフォルト信号である、請求項5記載の電子制御装置。
【請求項7】
前記判定回路において、前記種別復号部に代えて、前記予め定めるハイレベルまたはローレベルの一方のレベルになったことを判定する2値判定部を備える他のコントローラを有する、請求項5記載の電子制御装置。
【請求項8】
前記制御装置は、負荷へ電源供給する電源回路の制御装置である、請求項5記載の電子制御装置。
【請求項9】
前記制御装置は、前記コントローラからの制御信号をパワー増幅して負荷を駆動する負荷駆動装置である、請求項5記載の電子制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、コントローラおよび電子制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から、制御装置間では、各種の信号をやり取りして、たとえば、協働した、個別の、或いは主従関係を有する制御が行われる。主従関係の制御は、たとえば、1または複数の制御装置と、上位の(マスター)コントローラとの構成で実現される。そのような構成で、前記の各種の信号をやり取りするために、通信回路および通信端子を設けることで、それらの通信回路および通信端子の能力に応じた情報をやり取りすることが可能である。
【0003】
一方、前記の各種の信号として、簡易的には、従来から、ハイレベル(たとえばVDD)とローレベル(GND)との2値で表される信号も用いられている。この信号は、たとえば送信側のステータス(状態、状況)を表し、2値信号であるので、健全状態で非アクティブ側にあり、誤り、故障、異常など(以下、異常で代表する)の状態となるとアクティブ側に切換わり、或いは逆の態様のケースも存在する。そのようなステータス信号の代表例が、フォルト(fault)信号である。
【0004】
フォルト信号がアクティブの状況となると、制御装置は、たとえば制御を停止する。フォルト信号は、たとえば所定の検出回路で、監視要因(パラメータ)が所定の閾値に達したか否かで判定されて出力されるので、簡単なコンパレータなどで作成でき、格別の通信回路などは必要としない。
【0005】
特許文献1には、制御装置からコントローラへ、フォルト信号を出力する構成が示されている。特許文献1は、制御装置およびコントローラを備える電子制御装置(ECU:Electronic Control Unit)であり、車載機器の負荷を駆動する負荷駆動装置として実現されている。
【先行技術文献】
【特許文献】
【0006】
特開2011-55333号公報
【0007】
[概要]
特許文献1のような構成において、監視要因が複数存在すると、監視の手法(たとえば温度、電流)も異なり、検出回路も複数設けられる。しかしながら、各検出回路の出力は2値信号であるので、ダイオードOR回路などで論理和が得られて、単一のフォルト端子から出力可能である。そうすると、フォルト信号を受信するコントローラは、フォルト端子は1つですむものの、統合された(論理和が取られた)フォルト信号がアクティブになっているか否かしか判定できず、判定結果に応じた制御などを行うにも限りがある。このように、フォルト信号に代表される2値のステータス信号は、2つの態様しか表せないので、外部へ報知できる情報に制限がある。
【0008】
本開示の目的は、新たに格別の通信端子および通信回路などを設けることなく、ステータス信号で、より多くの情報を提供できる制御装置、コントローラおよび電子制御装置を提供することにある。
【0009】
上述した課題を解決するために、本開示の一態様は、1または複数の制御対象を制御する制御装置において、前記制御対象に関して、相互に異なる複数の監視要因でそれぞれ監視し、予め定める態様となったことを検出すると、ハイレベルまたはローレベルの2値信号で出力されているステータス信号を、その予め定める態様を表す一方のレベルとする複数の検出回路と、前記制御対象の制御を行い、前記ステータス信号から、前記複数の検出回路の少なくとも1つで前記予め定める態様が検出された際に、その態様に応じた制御も行う第1の制御回路と、前記複数の検出回路のステータス信号を統合し、かつ前記複数の検出回路のステータス信号の何れで前記予め定める態様の監視要因が検出されたのかの種別判定を行い、その判定結果に応じて、前記ステータス信号を、前記予め定める態様の監視要因を表す一方のレベル側で、予め定める微小な1または複数のレベルだけ、前記一方のレベルからシフトさせて出力する種別判定回路とを備える。
【0010】
本開示の一態様によれば、ステータス信号で、より多くの情報を提供することができる制御装置、コントローラおよび電子制御装置を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ローム株式会社
駆動回路
1日前
ローム株式会社
メモリ装置
6日前
ローム株式会社
半導体装置
今日
ローム株式会社
半導体装置
6日前
ローム株式会社
半導体装置
6日前
ローム株式会社
半導体装置
6日前
ローム株式会社
半導体装置
6日前
ローム株式会社
半導体装置
2日前
ローム株式会社
半導体装置
6日前
ローム株式会社
半導体装置
1日前
ローム株式会社
半導体装置
1日前
ローム株式会社
半導体装置
今日
ローム株式会社
半導体装置
1日前
ローム株式会社
暗号化装置
今日
ローム株式会社
半導体装置
今日
ローム株式会社
テスト回路
今日
ローム株式会社
半導体装置
今日
ローム株式会社
信号出力回路
6日前
ローム株式会社
時間測定回路
1日前
ローム株式会社
無線通信装置
今日
ローム株式会社
無線通信回路
1日前
ローム株式会社
フォトダイオード
1日前
ローム株式会社
不揮発性メモリ装置
6日前
ローム株式会社
不揮発性メモリ装置
6日前
ローム株式会社
不揮発性メモリ装置
6日前
ローム株式会社
判定回路、半導体装置
6日前
ローム株式会社
不揮発性半導体記憶装置
6日前
ローム株式会社
アンテナ付高周波モジュール
1日前
ローム株式会社
表示装置及びソースドライバ
6日前
ローム株式会社
半導体装置及び半導体チップ
今日
ローム株式会社
クロックデータリカバリ回路
6日前
ローム株式会社
半導体装置及び高電圧検出アンプ
6日前
ローム株式会社
半導体装置、および通信システム
今日
ローム株式会社
半導体装置、および通信システム
今日
ローム株式会社
スイッチ装置及び負荷駆動システム
今日
ローム株式会社
音波処理装置、ソナー装置及び車両
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ