TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025078305
公報種別
公開特許公報(A)
公開日
2025-05-20
出願番号
2023190771
出願日
2023-11-08
発明の名称
積付制御装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
B65G
67/04 20060101AFI20250513BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】荷台に複数のパレットを積み付ける際に、積付位置の算出精度を確保すると共に、積付完了までの時間を短縮することができる積付制御装置を提供する。
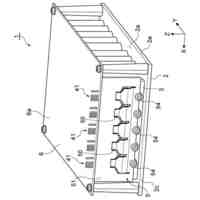
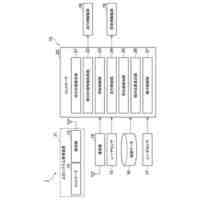
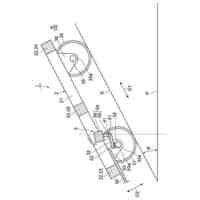
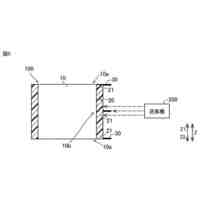
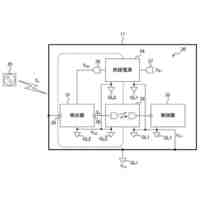
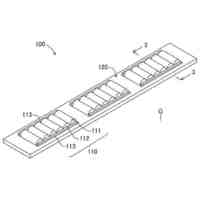
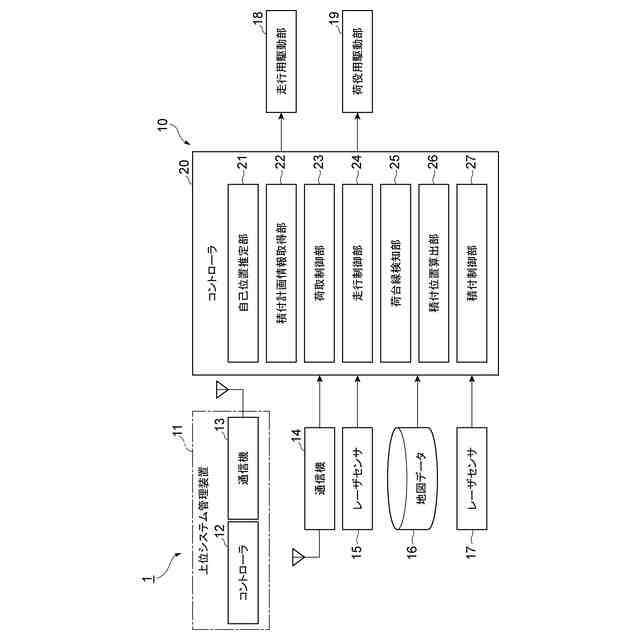
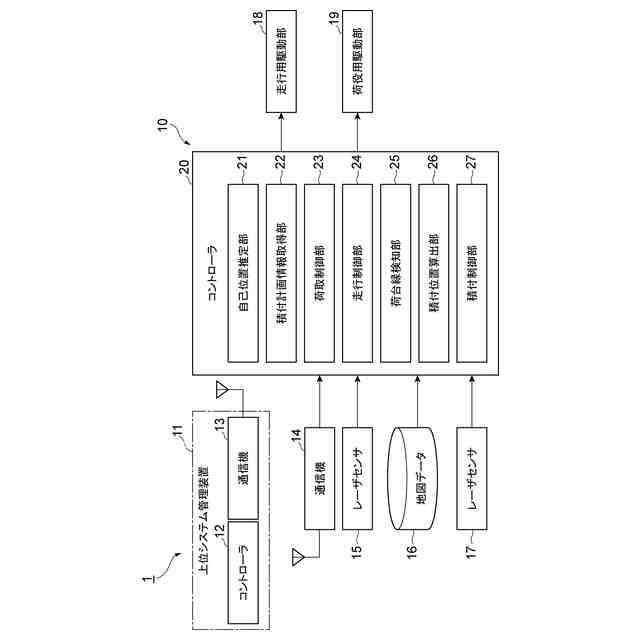
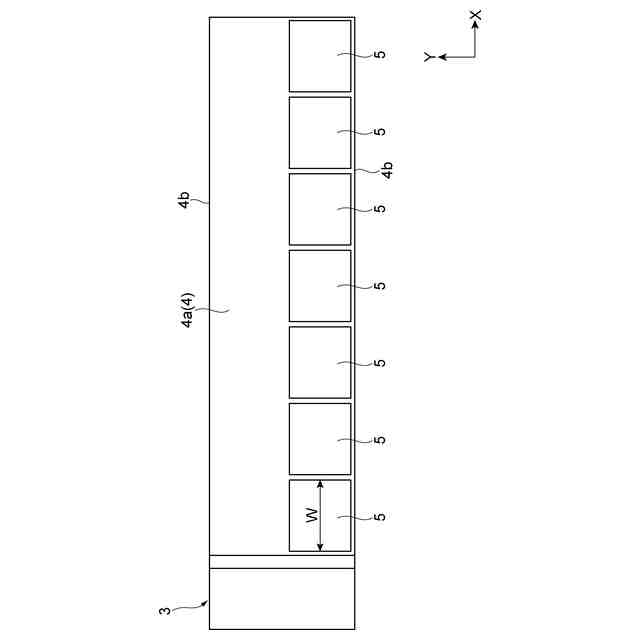
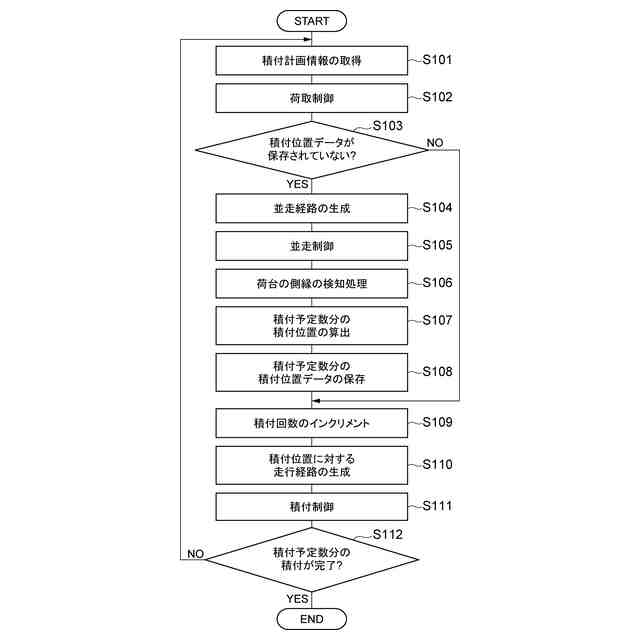
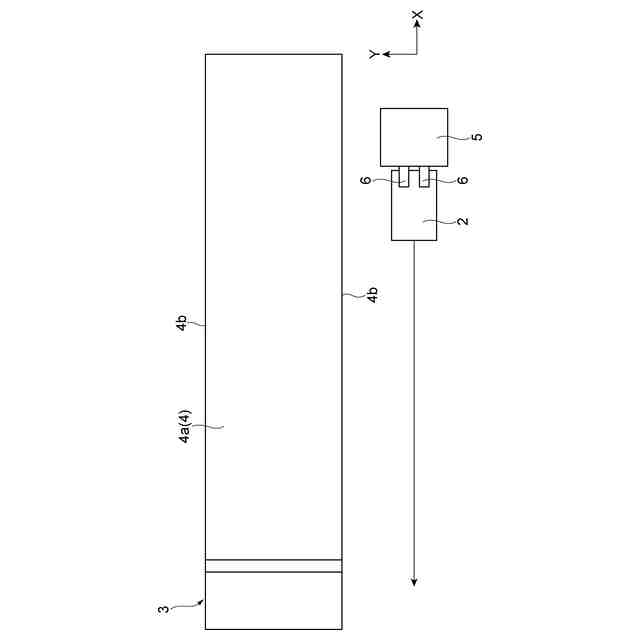
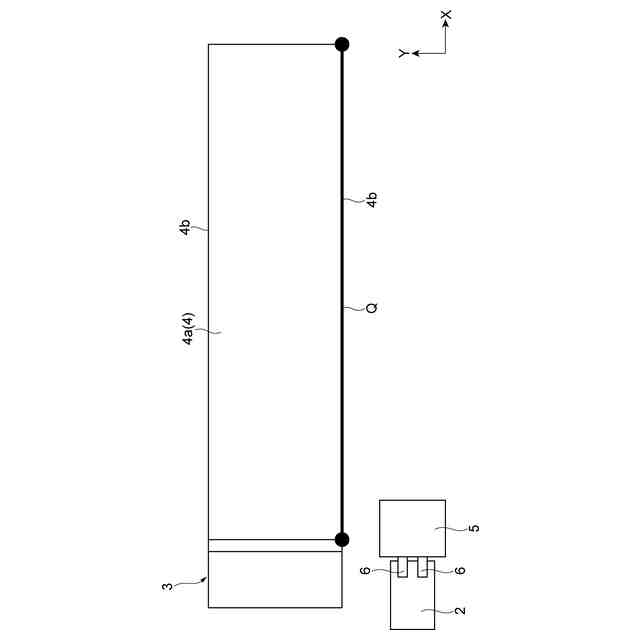
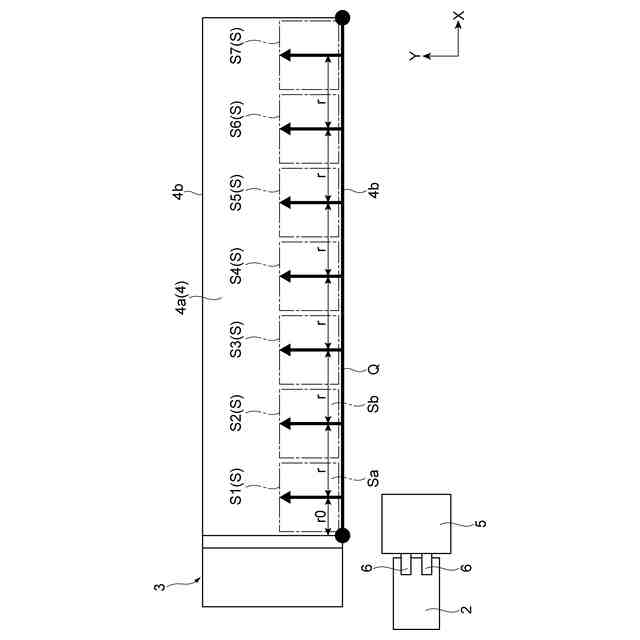
【解決手段】積付制御装置10は、荷台4の規定方向に積み付けられるパレット5の積付予定数及び横幅寸法を含むパレット情報を取得する積付計画情報取得部22と、フォークリフト2が規定方向に沿って走行しているときに、荷台4の載置面4aを検出するレーザセンサ17と、レーザセンサ17の検出データに基づいて、規定方向に沿った荷台4の側縁4bを検知する荷台縁検知部25と、パレット5の積付予定数及び横幅寸法と荷台4の側縁4bとに基づいて、パレット5の積付予定数分の積付位置Sを算出する積付位置算出部26と、積付予定数分の積付位置Sにパレット5が順次積み付けられるようにフォークリフト2を制御する積付制御部27とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
フォークリフトにより荷台に複数のパレットを積み付ける積付制御装置であって、
前記荷台の規定方向に積み付けられる前記パレットの積付予定数及び横幅寸法を含むパレット情報を取得するパレット情報取得部と、
前記フォークリフトを前記規定方向に沿って走行させるように制御する走行制御部と、
前記フォークリフトが前記規定方向に沿って走行しているときに、前記荷台の載置面を検出する荷台検出部と、
前記荷台検出部の検出データに基づいて、前記規定方向に沿った前記荷台の縁を検知する荷台縁検知部と、
前記パレット情報取得部により取得された前記パレットの積付予定数及び横幅寸法と前記荷台縁検知部により検知された前記荷台の縁とに基づいて、前記パレットの積付予定数分の積付位置を算出する積付位置算出部と、
前記積付位置算出部により算出された前記積付予定数分の積付位置に前記パレットが順次積み付けられるように前記フォークリフトを制御する積付制御部とを備える積付制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記積付位置算出部は、前記パレットの積付予定数及び横幅寸法と前記荷台の縁とに基づいて、前記積付予定数分の積付位置を一括して算出する請求項1記載の積付制御装置。
【請求項3】
前記積付位置算出部は、任意の積付位置に対して前記規定方向に前記パレットの横幅寸法分または前記パレットの横幅寸法よりも規定量大きい分だけオフセットされた位置を、前記任意の積付位置に前記規定方向に隣り合う積付位置として算出する請求項2記載の積付制御装置。
【請求項4】
前記積付位置算出部により一括して算出された前記積付予定数分の積付位置の使用が指示されたかどうかを判断する判断部を更に備え、
前記積付制御部は、前記判断部により前記積付予定数分の積付位置の使用が指示されたと判断したときは、前記積付予定数分の積付位置に前記パレットが順次積み付けられるように前記フォークリフトを制御し、
前記判断部により前記積付予定数分の積付位置の使用が指示されていないと判断したときは、前記走行制御部、前記荷台縁検知部及び前記積付位置算出部の処理を再度実行する請求項2記載の積付制御装置。
【請求項5】
前記積付位置算出部は、前記荷台の縁に基づいて、前記荷台に最初に積み付けられる前記パレットの積付位置を算出すると共に、前回算出された積付位置と前記パレットの積付予定数及び横幅寸法と前記荷台の縁とに基づいて、前記荷台に今回積み付けられる前記パレットの積付位置を算出する請求項1記載の積付制御装置。
【請求項6】
前記積付位置算出部は、前記前回算出された積付位置に対して前記規定方向に前記パレットの横幅寸法分または前記パレットの横幅寸法よりも規定量大きい分だけオフセットされた位置を、前記今回積み付けられるパレットの積付位置として算出する請求項5記載の積付制御装置。
【請求項7】
前記前回算出された積付位置の使用が指示されたかどうかを判断する判断部を更に備え、
前記積付位置算出部は、前記前回算出された積付位置の使用が指示されたと判断したときは、前記前回算出された積付位置と前記パレットの積付予定数及び横幅寸法と前記荷台の縁とに基づいて、前記今回積み付けられる前記パレットの積付位置を算出し、
前記判断部により前記前回算出された積付位置の使用が指示されていないと判断したときは、前記走行制御部、前記荷台縁検知部及び前記積付位置算出部の処理を再度実行する請求項5記載の積付制御装置。
【請求項8】
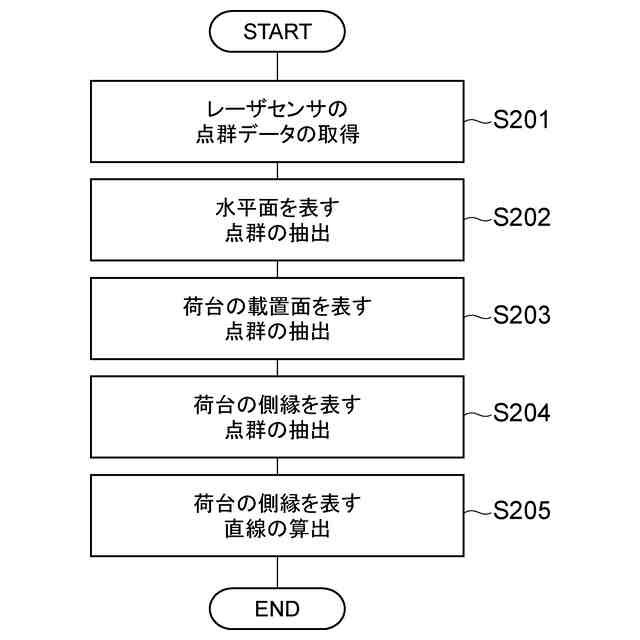
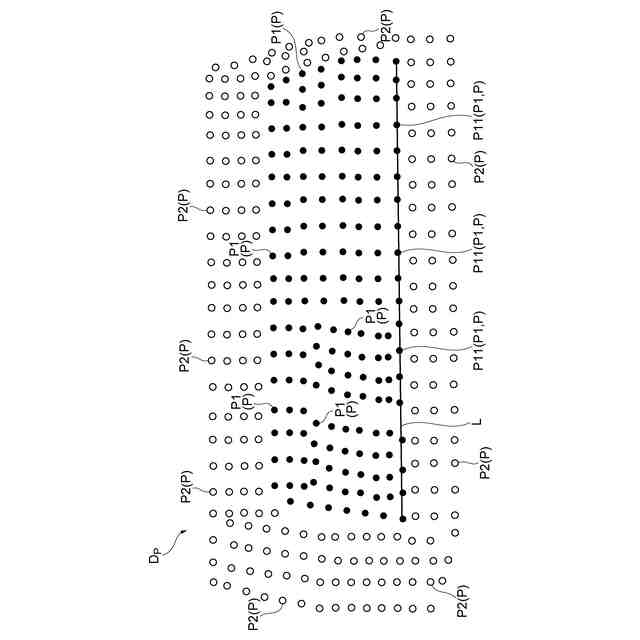
前記荷台検出部は、前記荷台の載置面に向けてレーザを照射し、レーザの反射光を受光することにより、前記載置面までの距離を検出して点群データを取得するレーザセンサであり、
前記荷台縁検知部は、前記レーザセンサの点群データに基づいて、前記規定方向に沿った前記荷台の縁を表す点群を抽出して、前記荷台の縁を検知する請求項1記載の積付制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、積付制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来の積付制御装置としては、例えば特許文献1に記載されているように、レーザセンサ等の外界センサにより物体の位置を検出し、物体の位置を表した点の集合である点群データに基づいて荷台を表す点を抽出し、荷台において荷の積み付けを行う積付位置を決定する技術が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2023-30983号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
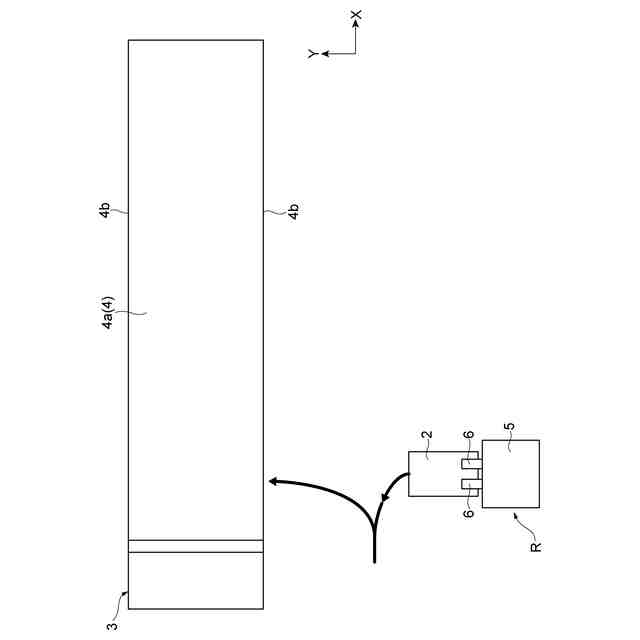
ところで、フォークリフトによりトラックの荷台に複数のパレットを積み付けるときは、フォークリフトがトラックの前後方向に走行しながら、荷台を検知して積付位置を算出する。この場合、パレットの積付位置を精度良く算出しつつ、荷台に対するパレットの積付を早く完了させることが望まれている。
【0005】
本発明の目的は、荷台に複数のパレットを積み付ける際に、積付位置の算出精度を確保しつつ、積付完了までの時間を短縮することができる積付制御装置を提供することである。
【課題を解決するための手段】
【0006】
(1)本発明の一態様は、フォークリフトにより荷台に複数のパレットを積み付ける積付制御装置であって、荷台の規定方向に積み付けられるパレットの積付予定数及び横幅寸法を含むパレット情報を取得するパレット情報取得部と、フォークリフトを規定方向に沿って走行させるように制御する走行制御部と、フォークリフトが規定方向に沿って走行しているときに、荷台の載置面を検出する荷台検出部と、荷台検出部の検出データに基づいて、規定方向に沿った荷台の縁を検知する荷台縁検知部と、パレット情報取得部により取得されたパレットの積付予定数及び横幅寸法と荷台縁検知部により検知された荷台の縁とに基づいて、パレットの積付予定数分の積付位置を算出する積付位置算出部と、積付位置算出部により算出された積付予定数分の積付位置にパレットが順次積み付けられるようにフォークリフトを制御する積付制御部とを備える。
【0007】
このような積付制御装置においては、フォークリフトが荷台の規定方向に沿って走行しているときに、荷台検出部によって荷台の載置面が検出される。そして、荷台検出部の検出データに基づいて、荷台の規定方向に沿った荷台の縁が検知される。そして、予め取得されたパレットの積付予定数及び横幅寸法と荷台の縁とに基づいて、パレットの積付予定数分の積付位置が算出される。そして、積付予定数分の積付位置にパレットが順次積み付けられるようにフォークリフトが制御される。ここで、パレットの積付予定数分の積付位置は、パレットの積付予定数及び横幅寸法と荷台の縁とに基づいて算出される。このため、複数のパレットの積付位置の算出精度が確保される。また、荷台の載置面を検出して荷台の縁を検知するために、フォークリフトを荷台の規定方向に沿って走行させる回数は、必要最小限で済む。従って、パレットの積付完了までのフォークリフトの総走行距離が短くなるため、パレットの積付完了までの時間が短縮される。
【0008】
(2)上記の(1)において、積付位置算出部は、パレットの積付予定数及び横幅寸法と荷台の縁とに基づいて、積付予定数分の積付位置を一括して算出してもよい。
【0009】
このような構成では、パレットの積付予定数分の積付位置を一括して算出することにより、全体的に計算処理の簡素化が図られる。
【0010】
(3)上記の(2)において、積付位置算出部は、任意の積付位置に対して規定方向にパレットの横幅寸法分またはパレットの横幅寸法よりも規定量大きい分だけオフセットされた位置を、任意の積付位置に規定方向に隣り合う積付位置として算出してもよい。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
電力変換器
3日前
株式会社豊田自動織機
積付制御装置
3日前
株式会社豊田自動織機
モータ冷却装置
1日前
株式会社豊田自動織機
エアジェット織機
8日前
株式会社豊田自動織機
燃料電池モジュール
1日前
株式会社豊田自動織機
蓄電装置の製造方法
7日前
株式会社豊田自動織機
内燃機関の燃料制御装置
3日前
株式会社豊田自動織機
産業車両の油圧駆動装置
1日前
株式会社豊田自動織機
被牽引車及び牽引システム
1日前
株式会社豊田自動織機
太陽光発電パネルの固定構造
10日前
株式会社豊田自動織機
フィルム貼合樹脂板の製造方法
3日前
株式会社豊田自動織機
内燃機関及び内燃機関の制御装置
3日前
トヨタ自動車株式会社
電極の製造方法
4日前
トヨタ自動車株式会社
電池の製造方法
8日前
トヨタ自動車株式会社
リチウムイオン電池
8日前
トヨタ自動車株式会社
蓄電モジュールの製造方法
今日
トヨタ自動車株式会社
バイポーラ型電池の製造方法
今日
トヨタ自動車株式会社
電極の製造方法及び電池の製造方法
3日前
トヨタ自動車株式会社
電極及び電極の製造方法並びに電池の製造方法
3日前
株式会社豊田中央研究所
制御装置及び制御システム
3日前
個人
箱
7か月前
個人
包装体
7か月前
個人
ゴミ箱
7か月前
個人
コンベア
今日
個人
ゴミ収集器
1か月前
個人
容器
4か月前
個人
段ボール箱
2か月前
個人
段ボール箱
1か月前
個人
角筒状構造体
10日前
個人
土嚢運搬器具
3か月前
個人
パウチ補助具
7か月前
個人
宅配システム
1か月前
個人
折り畳み水槽
7か月前
個人
ダンボール宝箱
8か月前
個人
お薬の締結装置
21日前
個人
コード類収納具
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ