TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025082206
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023195526
出願日
2023-11-16
発明の名称
車両の波状路駆動力抑制制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60W
30/02 20120101AFI20250521BHJP(車両一般)
要約
【課題】波状路の加速走行において、ドライバーが駆動力制限制御中にアクセルを緩める等の操作に拘わらず、駆動系部品やマウントなどへの過大な入力を抑制しつつ動力性能を確保することができる、波状路駆動力抑制制御装置を提供することにある。
【解決手段】第2電動機MG2の回転数Nmg2の変動周波数Fmg2が所定の周波数範囲Fl~Fu内にある間は、前記駆動力制限制御が解除されず、駆動系の回転変動周波数が所定の範囲Fl~Fu外になると、前記駆動力制限制御が解除される。これにより、ドライバーが駆動力制限制御中にアクセルを緩める等の操作が行なわれても、前記駆動系の回転変動周波数は所定の範囲Fl~Fu内にあるので、アクセルを緩める等の操作に拘わらず駆動力制限制御が継続され、駆動系部品やマウントなどへの過大な入力を抑制しつつ動力性能を確保することができる。
【選択図】図1
特許請求の範囲
【請求項1】
車両の波状路の加速走行において、駆動系の回転数変動を表す値が実際の波状路に応じて予め定められた共振判定閾値以上である場合は、波状路を走行する駆動力を上限値により抑制する駆動力制限制御を実行する車両の波状路駆動力抑制制御装置であって、
前記駆動系の回転変動周波数が所定の周波数範囲内にある間は、前記駆動力制限制御を解除せず、前記駆動系の回転変動周波数が所定の周波数範囲外になると、前記駆動力制限制御を解除する
ことを特徴とする車両の波状路駆動力抑制制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、波状路の加速走行において、駆動系の回転数の変動をあらわす値が共振判定閾値以上である場合に、車両の駆動力を上限値によって制限する車両の波状路駆動力抑制制御装置に関するものである。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
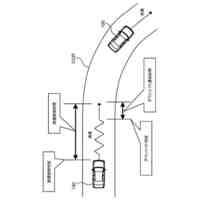
車両が波状路に進入してしまう場合の車両の波状路の加速走行では、凹凸路面から車両への入力振動と、車両及びサスペンション等が有する固有振動数との共振により、凹凸路面から車両への入力振動が増幅され、車両が備える駆動系部品やインバータ等に過負荷を与えてしまう。
【0003】
これに対して、車両の波状路の加速走行において、駆動系の回転数変動を表す値が実際の波状路に応じて予め定められた共振判定閾値以上である場合は、車両の波状路走行駆動力を予め設定された上限値により抑制する駆動力制限制御を実行する波状路駆動力抑制制御装置が、提案されている。たとえば、特許文献1に記載のものがそれである。これによれば、波状路に拘わらず、駆動系部品や、動力源や動力伝達装置等を支持して車体に固定するマウント、インバータなどへの過大な入力が抑制されつつ、動力性能が確保される。
【先行技術文献】
【特許文献】
【0004】
特許第7272281号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
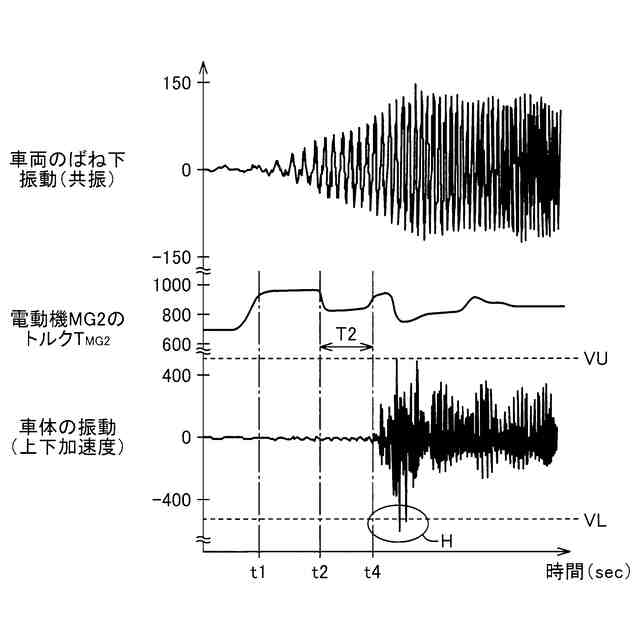
ところで、特許文献1に装置では、駆動系の回転数変動を表す値が共振判定閾値値を下回ると、車両の駆動力を上限値により制限する駆動力制限制御が解除される。しかしながら、実際の車両の波状路走行では、ドライバーが駆動力制限制御中にアクセルを緩める等の操作があると、過大振動周波数帯を通過する前に駆動力制限制御が解除され、その後にアクセル全開操作が行なわれると、駆動系部品や、動力源や動力伝達装置等を支持して車体に固定するマウント、インバータなどへ過大な振動が入力されるという問題があった。
【0006】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、波状路の加速走行において、ドライバーが駆動力制限制御中にアクセルを緩める等の操作に拘わらず、駆動系部品やマウントなどへの過大な入力を抑制しつつ動力性能を確保することができる、車両の波状路駆動力抑制制御装置を提供することにある。
【課題を解決するための手段】
【0007】
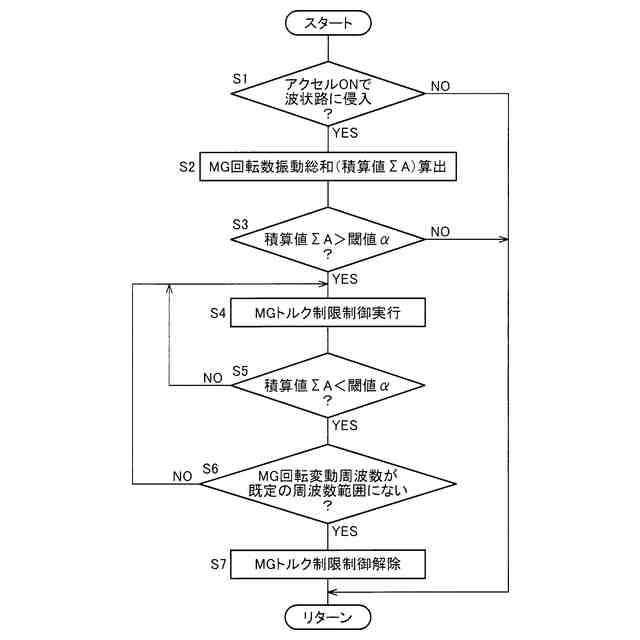
本発明の要旨とするところは、(a)車両の波状路の加速走行において、駆動系の回転数変動を表す値が実際の波状路に応じて予め定められた共振判定閾値以上である場合は、波状路を走行する駆動力を上限値により抑制する駆動力制限制御を実行する車両の波状路駆動力抑制制御装置であって、(b)前記駆動系の回転変動周波数が所定の範囲内にある間は、前記駆動力制限制御を解除せず、前記駆動系の回転変動周波数が所定の範囲外になると、前記駆動力制限制御を解除することにある。
【発明の効果】
【0008】
本発明の車両の波状路駆動力抑制制御装置によれば、前記駆動系の回転変動周波数が所定の範囲内にある間は、前記駆動力制限制御が解除されず、前記駆動系の回転変動周波数が所定の範囲外になると、前記駆動力制限制御が解除される。これにより、ドライバーが駆動力制限制御中にアクセルを緩める等の操作が行なわれても、前記駆動系の回転変動周波数は所定の範囲内にあるので、アクセルを緩める等の操作に拘わらず駆動力制限制御が継続され、駆動系部品やマウントなどへの過大な入力を抑制しつつ動力性能を確保することができる。
【図面の簡単な説明】
【0009】
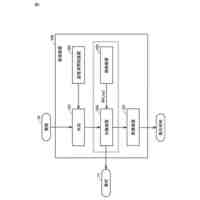
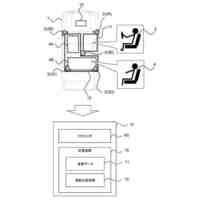
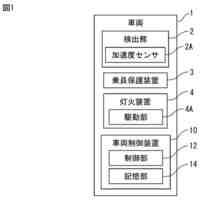
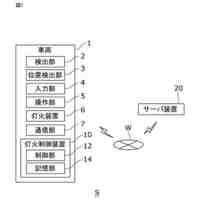
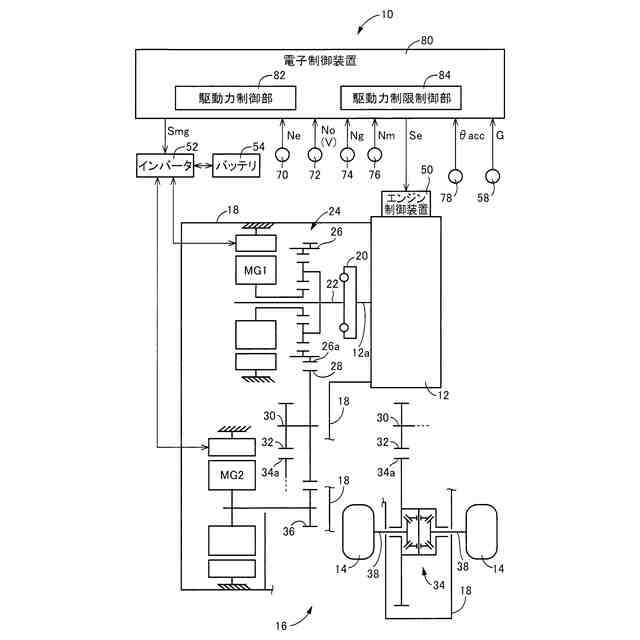
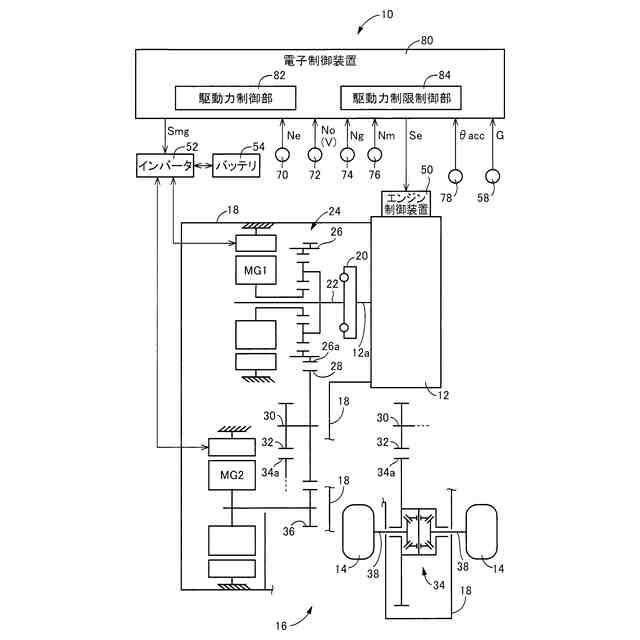
本発明が適用される車両の概略構成を説明する図であると共に、車両における各種制御の為の制御機能及び制御系統の要部を説明する図である。
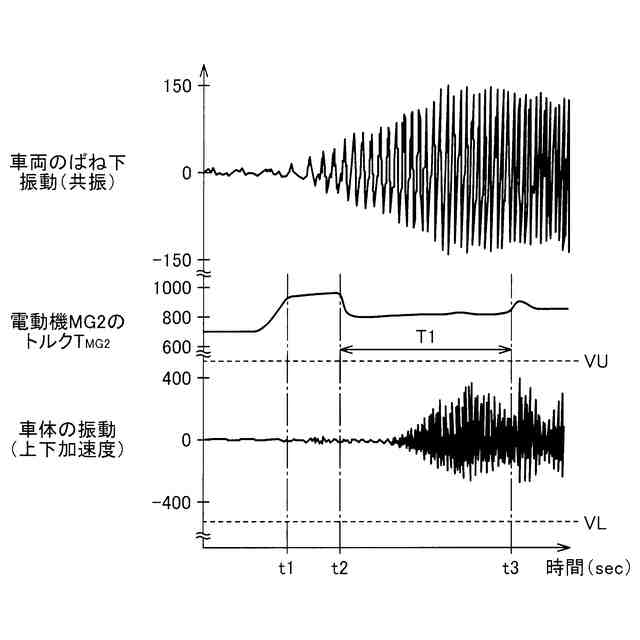
図1の電子制御装置の制御作動の要部を説明するタイムチャートである。
図1の電子制御装置の比較例の制御作動の要部を説明するタイムチャートである。
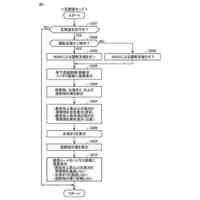
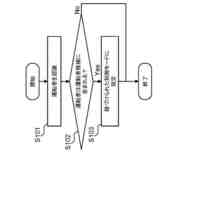
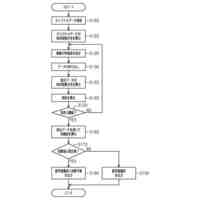
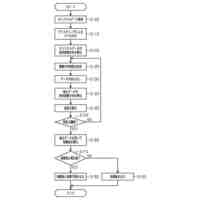
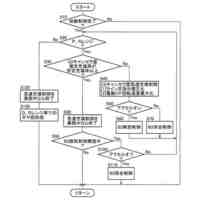
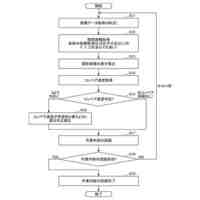
図1の電子制御装置の制御作動の要部を説明するフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施例を図面を参照して詳細に説明する。
【実施例】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
電池
2日前
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
二次電池
1日前
トヨタ自動車株式会社
予測方法
1日前
トヨタ自動車株式会社
剥離装置
今日
トヨタ自動車株式会社
ドローン
今日
トヨタ自動車株式会社
エンジン
今日
トヨタ自動車株式会社
製造装置
今日
トヨタ自動車株式会社
関節機構
1日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
電気自動車
2日前
トヨタ自動車株式会社
電気自動車
3日前
トヨタ自動車株式会社
電気自動車
3日前
トヨタ自動車株式会社
電池パック
3日前
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
情報管理装置
2日前
トヨタ自動車株式会社
車両前部構造
1日前
トヨタ自動車株式会社
車両前部構造
1日前
トヨタ自動車株式会社
情報処理装置
1日前
トヨタ自動車株式会社
動作分類方法
1日前
トヨタ自動車株式会社
情報処理装置
1日前
トヨタ自動車株式会社
車両制御装置
1日前
トヨタ自動車株式会社
差動制限装置
今日
トヨタ自動車株式会社
配光制御装置
今日
トヨタ自動車株式会社
情報処理装置
1日前
トヨタ自動車株式会社
地図作成装置
今日
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
灯火制御装置
今日
トヨタ自動車株式会社
車両の制御装置
今日
トヨタ自動車株式会社
車両の制御装置
2日前
トヨタ自動車株式会社
車両の制御装置
今日
トヨタ自動車株式会社
電池の製造方法
1日前
トヨタ自動車株式会社
車両用リッド装置
1日前
トヨタ自動車株式会社
作業認識システム
1日前
トヨタ自動車株式会社
機械学習システム
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ